两道题都是给出若干圆 就面积并,数据规模和精度要求不同。
求圆面积并有两种常见的方法,一种是Simpson积分,另一种是几何法。
在这里给出几何方法。
PS.以下算法基于正方向为逆时针
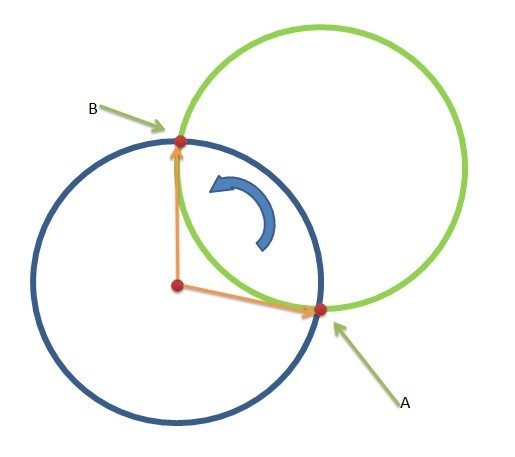
考虑上图中的蓝色圆,绿色的圆和蓝色的圆交于 A,B 2个交点 ,我们在逆时针系下考虑,那么 可以知道 对于蓝色的圆,它对应的某个 角度区间被覆盖了
假设 区间为 [A, B], 并且角度是按照 圆心到交点的 向量的 极角来定义 (为了方便,我一般都把角度转化到 [0,2pi]区间内) 那么可以知道在这种 标识情况下,可能存在以下情况
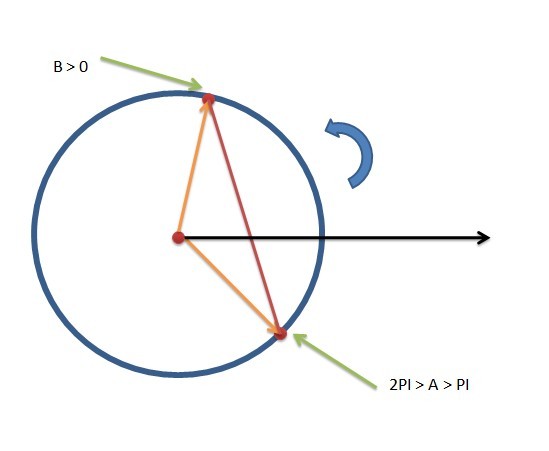
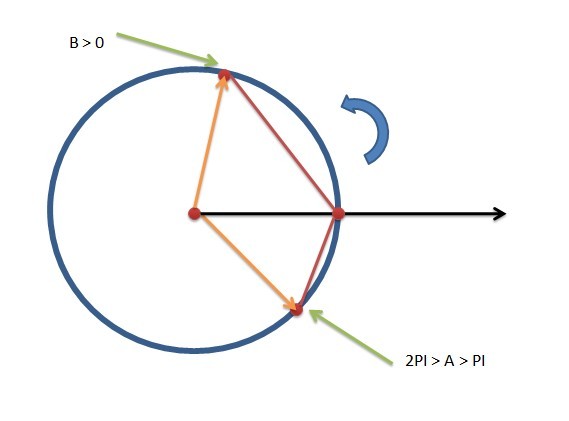
这种区间的跨度如何解决呢?实际上十分简单,只需要把[A,B] 拆成 [A, 2PI], [0,B]即可,也就是所谓的添加虚拟点
下面介绍一下 对于我们当前所求任务的实际运用( 利用上述做法)
首先 对于所给的N个圆,我们可以进行去冗杂,表现为:
(1) 去掉被包含(内含 or 内切)的小圆 ()
(2) 去掉相同的圆
枚举一个圆,并对于剩下的圆和它求交点,对于所求的的交点,可以得到一个角度区间 [A,B], 当然区间如果跨越了(例如 [1.5PI, 0.5PI],注意这里是有方向的) 2PI那么需要拆 区间
可以知道,最后区间的并集必然是最后 所有圆和当前圆的交集的一个边界!
于是我们得到互补区间(所谓互补区间就是[0,2PI]内除去区间并的区间,可能有多个)
假设我们先枚举了橙色的圆,那么得到了许多角度区间,可以知道绿色的和蓝色的角度区间是“未被覆盖的”,对于未被覆盖的
圆弧染色!
而对于其他圆,我们也做同样的步骤, 同时把他们未被覆盖的角度区间的圆弧标记为黑色阴影
于是最终的结果就如下图 (染色只考虑圆弧)

通过观察不难发现,圆的并是许多的圆弧+ 许多多边形的面积之和(注意这里为简单多边形,并且面积有正负之别!)
于是我们累加互补区间的圆弧面积到答案,并把互补区间确定的弦的有向面积累加到答案
(例如在上面的例子中,我们在扫描到橙色圆的这一步只需要累加蓝色和绿色的圆弧面积 以及 蓝色和绿色的有向面积,注意这里蓝色和绿色的边必然是最后那个多边形的边!)
这里涉及到一个问题,就是:
圆弧可能大于一半的圆,例如上图中最大的圆,当然如果你推出了公式,那么实际上很容易发现无论圆弧长啥样都能算出正确的答案!
代码如下
#include<iostream>
#include<cstdio>
#include<cstdlib>
#include<cstring>
#include<cmath>
#include<vector>
#include<queue>
#include<stack>
#include<map>
#include<algorithm>
#include<complex>
using namespace std;
const double EPS=1e-9,PI=acos(-1.0);
int cmp(double k)
{
return k<-EPS ? -1:k>EPS ? 1:0;
}
inline double sqr(double x)
{
return x*x;
}
struct point
{
double x,y;
point (){}
point (double a,double b):x(a),y(b){}
bool input()
{
return scanf("%lf%lf",&x,&y)!=EOF;
}
friend point operator +(const point &a,const point &b)
{
return point(a.x+b.x,a.y+b.y);
}
friend point operator -(const point &a,const point &b)
{
return point(a.x-b.x,a.y-b.y);
}
friend bool operator ==(const point &a,const point &b)
{
return cmp(a.x-b.x)==0&&cmp(a.y-b.y)==0;
}
friend point operator *(const point &a,const double &b)
{
return point(a.x*b,a.y*b);
}
friend point operator*(const double &a,const point &b)
{
return point(a*b.x,a*b.y);
}
friend point operator /(const point &a,const double &b)
{
return point(a.x/b,a.y/b);
}
double norm()
{
return sqrt(sqr(x)+sqr(y));
}
};
double cross(const point &a,const point &b)
{
return a.x*b.y-a.y*b.x;
}
struct Circle
{
point p;
double r;
bool operator <(const Circle &o)const
{
if(cmp(r-o.r)!=0)return cmp(r-o.r)==-1;
if(cmp(p.x-o.p.x)!=0)return cmp(p.x-o.p.x)==-1;
return cmp(p.y-o.p.y)==-1;
}
bool operator ==(const Circle &o)const
{
return cmp(r-o.r)==0&&cmp(p.x-o.p.x)==0&&cmp(p.y-o.p.y)==0;
}
};
point rotate(const point &p,double cost,double sint)
{
double x=p.x,y=p.y;
return point(x*cost-y*sint,x*sint+y*cost);
}
pair<point,point> crosspoint(point ap,double ar,point bp,double br)
{
double d=(ap-bp).norm();
double cost=(ar*ar+d*d-br*br)/(2*ar*d);
double sint=sqrt(1.-cost*cost);
point v=(bp-ap)/(bp-ap).norm()*ar;
return make_pair(ap+rotate(v,cost,-sint),ap+rotate(v,cost,sint));
}
inline pair<point,point> crosspoint(const Circle &a,const Circle &b)
{
return crosspoint(a.p,a.r,b.p,b.r);
}
const int maxn=2000;
struct Node
{
point p;
double a;
int d;
Node(const point &p,double a,int d):p(p),a(a),d(d){}
bool operator <(const Node &o)const{
return a<o.a;
}
};
double arg(point p)
{
return arg(complex<double>(p.x,p.y));
}
double solve(int m,Circle tc[],Circle c[])
{
int n=0;
sort(tc,tc+m);
m=unique(tc,tc+m)-tc;//unique返回去重后的尾地址
for(int i=m-1;i>=0;i--)
{
bool ok=true;
for(int j=i+1;j<m;++j)
{
double d=(tc[i].p-tc[j].p).norm();
if(cmp(d-abs(tc[i].r-tc[j].r))<=0)
{
ok=false;
break;
}
}
if(ok)c[n++]=tc[i];
}
double ans=0;
for(int i=0;i<n;++i)
{
vector<Node> event;
point boundary=c[i].p+point(-c[i].r,0);
event.push_back(Node(boundary,-PI,0));
event.push_back(Node(boundary,PI,0));
for(int j=0;j<n;++j)
{
if(i==j)continue;
double d=(c[i].p-c[j].p).norm();
if(cmp(d-(c[i].r+c[j].r))<0)
{
pair<point,point> ret=crosspoint(c[i],c[j]);
double x=arg(ret.first-c[i].p);
double y=arg(ret.second-c[i].p);
if(cmp(x-y)>0){
event.push_back(Node(ret.first,x,1));
event.push_back(Node(boundary,PI,-1));
event.push_back(Node(boundary,-PI,1));
event.push_back(Node(ret.second,y,-1));
}else{
event.push_back(Node(ret.first,x,1));
event.push_back(Node(ret.second,y,-1));
}
}
}
sort(event.begin(),event.end());
int sum=event[0].d;
for(int j=1;j<(int)event.size();++j)
{
if(sum==0)
{
ans+=cross(event[j-1].p,event[j].p)/2.;
double x=event[j-1].a;
double y=event[j].a;
double area=c[i].r*c[i].r*(y-x)/2;
point v1=event[j-1].p-c[i].p;
point v2=event[j].p-c[i].p;
area-=cross(v1,v2)/2.;
ans+=area;
}
sum+=event[j].d;
}
}
return ans;
}
Circle c[maxn],tc[maxn];
int m;
int main()
{freopen("t.txt","r",stdin);
scanf("%d",&m);
for(int i=0;i<m;i++)
tc[i].p.input(),scanf("%lf",&tc[i].r);
printf("%.5lf
",solve(m,tc,c)+0.00000005);
return 0;
}