论文地址:MobileNetV2: Inverted Residuals and Linear Bottlenecks
前文链接:『高性能模型』深度可分离卷积和MobileNet_v1
一、MobileNet v1 的不足
Relu 和数据坍缩
Moblienet V2文中提出,假设在2维空间有一组由 个点组成的螺旋线
数据,经随机矩阵
映射到
维并进行ReLU运算,即:
再通过 矩阵的广义逆矩阵
将
映射回2维空间:
对比 和
发现,当映射维度
时,数据坍塌;当
时,数据基本被保存。虽然这不是严格的数学证明,但是至少说明:channel少的feature map不应后接ReLU,否则会破坏feature map。
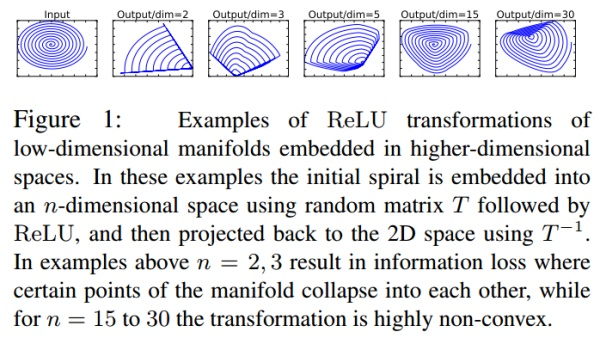
简单说一下上图:对于一个输入图像,首先通过一个随机矩阵T将数据转换为n维,然后对这n维数据进行ReLU操作,最后再使用T的逆矩阵转换回来,实验发现当n很小的时候,后面接ReLU非线性变换的话会导致很多信息的丢失,而且维度越高还原的图片和原图越相似。
ResNet 、Relu 和神经元死亡
在神经网络训练中如果节点的值变为0就会“死掉”。因为ReLU对0值的梯度是0,后续无论怎么迭代这个节点的值都不会恢复了。而通过ResNet结构的特征复用,可以很大程度上缓解这种特征退化问题(这也从一个侧面说明ResNet为何好于VGG)。另外,一般情况训练网络使用的是float32浮点数;当使用低精度的float16时,这种特征复用可以更加有效的减缓退化。
二、Inverted residual block
理解之前的问题后看,其实Mobilenet V2使用的基本卷积单元结构有以下特点:
- 整体上继续使用Mobilenet V1的Separable convolution降低卷积运算量
- 引入了特征复用结构,即采取了ResNet的思想
- 采用Inverted residual block结构,对Relu的缺陷进行回避
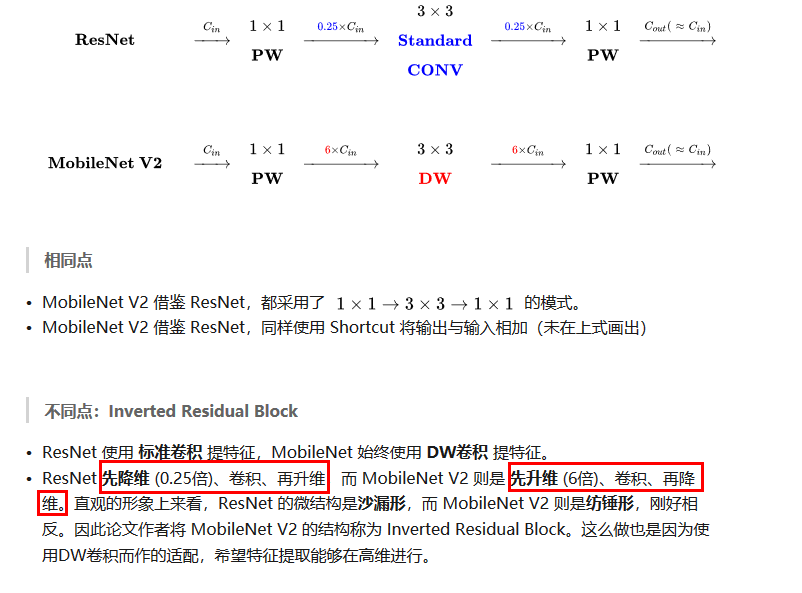
Inverted residuals 可以认为是residual block的拓展,其重点聚焦在残差网络各层的层数,进入block后会先将特征维数放大,然后再压缩回去,呈现梭子的外形,而传统残差设计是沙漏形,下面是MobileNetV1、MobileNetV2 和ResNet微结构对比:
下面则对比了近年来比较先进的压缩网络子模块:
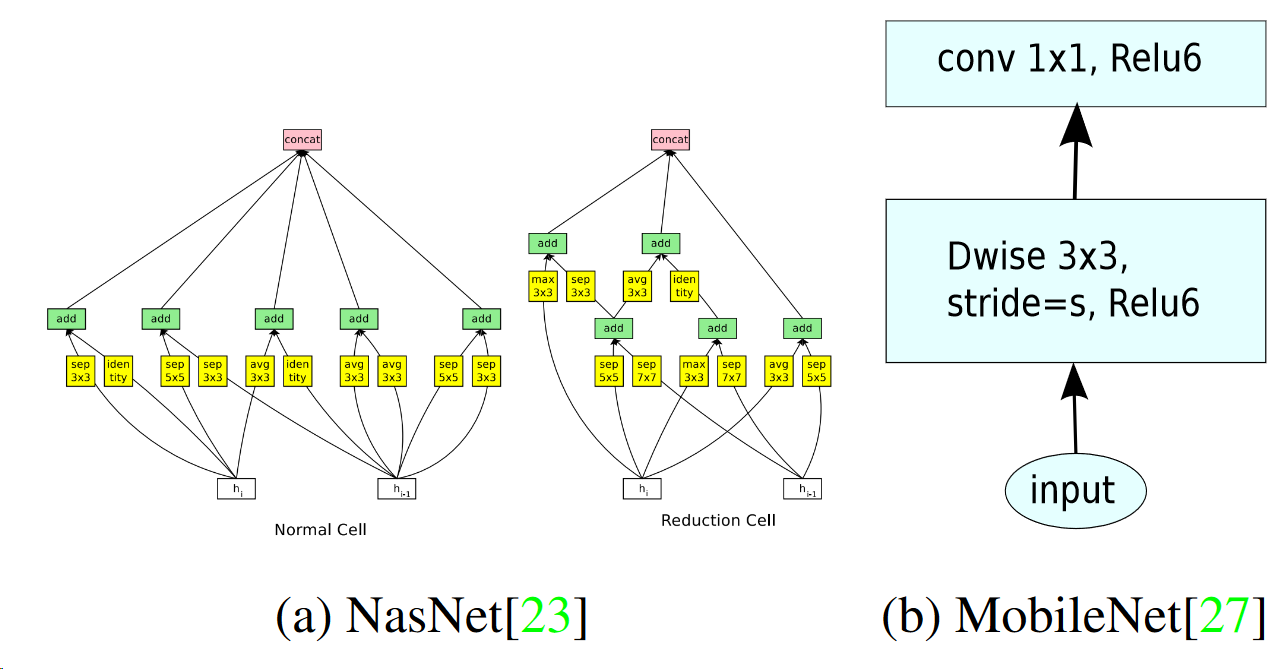
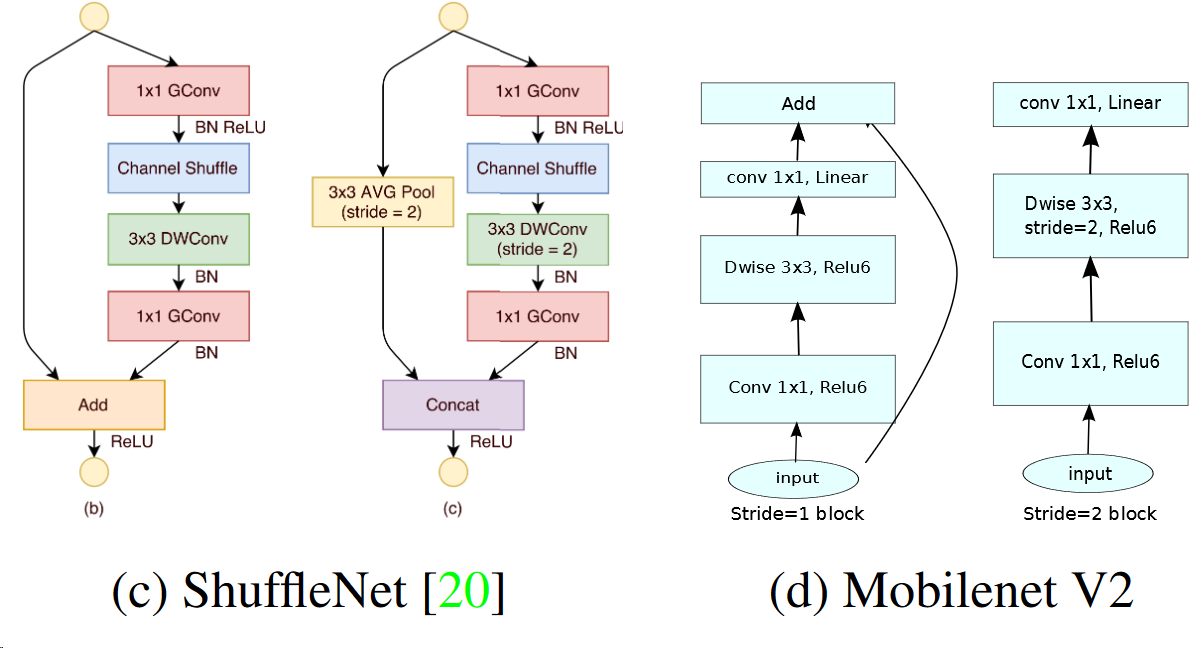
可以看到MobileNetV2 和ResNet基本结构很相似。不过ResNet是先降维(0.25倍)、提特征、再升维。而MobileNetV2 则是先升维(6倍)、提特征、再降维。、
注:模型中使用 ReLU6 作为非线性层,在低精度计算时能压缩动态范围,算法更稳健。
ReLU6 定义为:f(x) = min(max(x, 0), 6),详见 tf.nn.relu6 API
至于Linear Bottlenecks,论文中用很多公式表达这个思想,但是实现上非常简单,就是在MobileNetV2微结构中第二个PW后无ReLU6,对于低维空间而言,进行线性映射会保存特征,而非线性映射会破坏特征,实际代码如下:
def _bottleneck(inputs, nb_filters, t):
x = Conv2D(filters=nb_filters * t, kernel_size=(1,1), padding='same')(inputs)
x = Activation(relu6)(x)
x = DepthwiseConv2D(kernel_size=(3,3), padding='same')(x)
x = Activation(relu6)(x)
x = Conv2D(filters=nb_filters, kernel_size=(1,1), padding='same')(x)
# do not use activation function
if not K.get_variable_shape(inputs)[3] == nb_filters:
inputs = Conv2D(filters=nb_filters, kernel_size=(1,1), padding='same')(inputs)
outputs = add([x, inputs])
return outputs
相对应的,主结构堆叠上面的block 即可,下面是一个简单的版本,
def MobileNetV2_relu(input_shape, k):
inputs = Input(shape = input_shape)
x = Conv2D(filters=32, kernel_size=(3,3), padding='same')(inputs)
x = _bottleneck_relu(x, 8, 6)
x = MaxPooling2D((2,2))(x)
x = _bottleneck_relu(x, 16, 6)
x = _bottleneck_relu(x, 16, 6)
x = MaxPooling2D((2,2))(x)
x = _bottleneck_relu(x, 32, 6)
x = GlobalAveragePooling2D()(x)
x = Dense(128, activation='relu')(x)
outputs = Dense(k, activation='softmax')(x)
model = Model(inputs, outputs)
return model
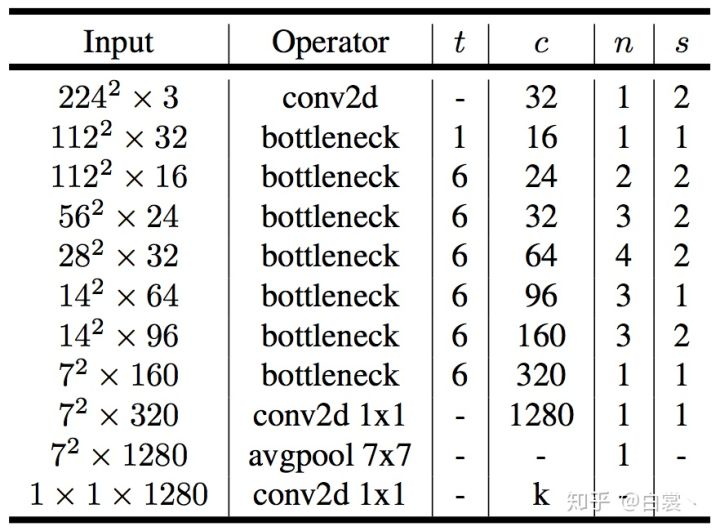
原文网络结构如下: