转载自知乎:卷积神经网络的复杂度分析
之前的Inception学习博客:
『TensorFlow』读书笔记_Inception_V3_上
『TensorFlow』读书笔记_Inception_V3_下
一、时间复杂度
即模型的运算次数,可用FLOPs衡量,也就是浮点运算次数(FLoating-point OPerations)。
单个卷积层的时间复杂度
Time~O(M2·K2·Cin·Cout)
M:输出特征图边长
K:卷积核尺寸
C:通道数目
输出边长M计算公式为:
M = (X - K + 2*Padding)//Stride + 1
- 注1:为了简化表达式中的变量个数,这里统一假设输入和卷积核的形状都是正方形
- 注2:严格来讲每层应该还包含 1 个
参数,这里为了简洁就省略了
- 注3:TensorFlow中SAME形式输出为(X/Stride)上取整,因为TF中默认总共填充K/2,注意不需要进行2*Padding
下图展示了单个Cout的上单个点的计算示意,需要重复计算:Cout·每张输出特征图上像素数次。

卷积神经网络整体复杂度
Time~O(∑l=1 M2·K2·Cl-1·Cl)
l表示层编号,实质就是对各个层求和。
卷积层实现可以很好的看清实现机理:out层、out长宽、in层循环,循环体内k2级别运算:
def conv2d(img, kernel):
height, width, in_channels = img.shape
kernel_height, kernel_width, in_channels, out_channels = kernel.shape
out_height = height - kernel_height + 1
out_width = width - kernel_width + 1
feature_maps = np.zeros(shape=(out_height, out_width, out_channels))
for oc in range(out_channels): # Iterate out_channels (# of kernels)
for h in range(out_height): # Iterate out_height
for w in range(out_width): # Iterate out_width
for ic in range(in_channels): # Iterate in_channels
patch = img[h: h + kernel_height, w: w + kernel_width, ic]
feature_maps[h, w, oc] += np.sum(patch * kernel[:, :, ic, oc])
return feature_maps
二、空间复杂度
空间复杂度(访存量),严格来讲包括两部分:总参数量 + 各层输出特征图。
- 参数量:模型所有带参数的层的权重参数总量(即模型体积,下式第一个求和表达式)
- 特征:模型在实时运行过程中每层所计算出的输出特征图大小(下式第二个求和表达式)
Space~O(∑K2·Cl-1·Cl + ∑M2·Cl)
M:输出特征图边长
K:卷积核尺寸
C:通道数目
三、复杂度对模型的影响
时间复杂度决定了模型的训练/预测时间。如果复杂度过高,则会导致模型训练和预测耗费大量时间,既无法快速的验证想法和改善模型,也无法做到快速的预测。
空间复杂度决定了模型的参数数量。由于维度诅咒的限制,模型的参数越多,训练模型所需的数据量就越大,而现实生活中的数据集通常不会太大,这会导致模型的训练更容易过拟合。
当我们需要裁剪模型时,由于卷积核的空间尺寸通常已经很小(3x3),而网络的深度又与模型的表征能力紧密相关,不宜过多削减,因此模型裁剪通常最先下手的地方就是通道数。
四、Inception系列优化思路
1、Inception_v1:1*1卷积降维同时优化时间复杂度和空间复杂度

InceptionV1 借鉴了 Network in Network 的思想,在一个 Inception Module 中构造了四个并行的不同尺寸的卷积/池化模块(上图左),有效的提升了网络的宽度。但是这么做也造成了网络的时间和空间复杂度的激增。对策就是添加 1 x 1 卷积(上图右红色模块)将输入通道数先降到一个较低的值,再进行真正的卷积。
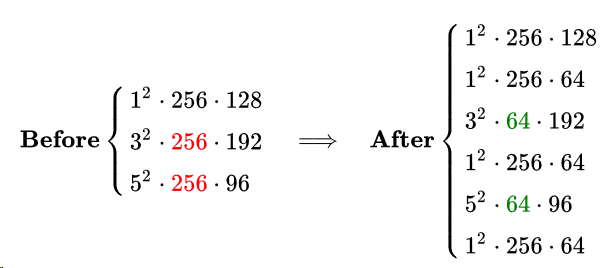
在3*3卷积分支上加入64个1*1卷积前后的时间复杂度对比如下式:

同理,在5*5卷积分支上加入64个1*1卷积前后的时间复杂度对比如下式:

整个层的参数量变化如下:
2、Inception_v1:使用GAP(全局平局均池化)代替全连接
全连接层复杂度分析:X*X的输入Flatten为X2的输入,输出神经元个数可以视为1*1*Cout,则:
Time~O(12·X2·Cin·Cout)
Space~O(X2·Cin·Cout + X2·Cin) ~ O(X2·Cin·Cout)
空间复杂度第一部分为权重参数,第二部分为当前输入大小。顺便一提我之前的一个误区:全连接层相对卷积层其运算瓶颈不在时间复杂度,而在空间复杂度,我之前的印象里把两者混为一谈了。
使用GAP后,首先将Cin·X2的输入转化为Cin,然后1*1卷积为Cout:
Time~O(Cin·Cout)
Space~O(Cin·Cout + Cin)~ O(Cin·Cout)
Space来说可能有点问题:Cin·X2的原输入应该还是要存储的,不过由于不涉及到卷积运算,姑且不细究。
但是注意:GAP会影响收敛速度,不过并不会影响最终的精度。
3、Inception_v2:两个3*3卷积联级替代5*5卷积
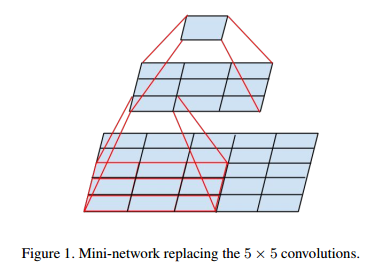
两个3*3卷积联级的感受野与单个5*5卷积相当,计算公式可见『计算机视觉』感受野和anchor,替换后时间复杂度却可降低:

4、Inception_v3:使用N*1和1*N卷积联级代替N*N卷积
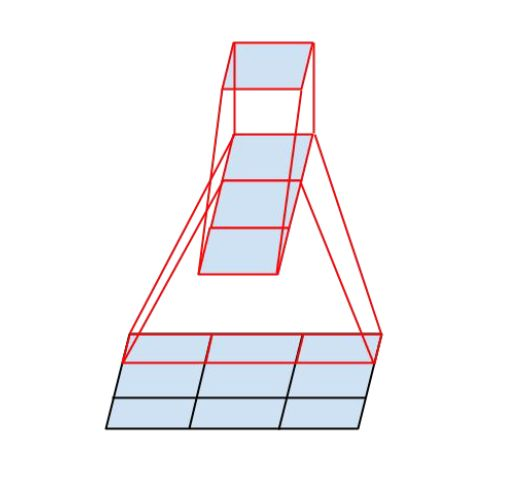
InceptionV3 中提出了卷积的 Factorization,在确保感受野不变的前提下进一步简化,复杂度的改善同理可得,不再赘述。
5、Xnception:使用Depth wise Separable Convolution

Xception 中每个输入通道只会被对应的一个卷积核扫描,降低了模型的冗余度。对于深度可分离卷积Depthwise Separable 是一个 Depthwise conv 加一个 Pointwise conv,其中 Depthwise 是M2·K2·Cin,Pointwise 是M2·Cin·Cout,即:
Time~O(M2·K2·Cin + M2·Cin·Cout)