matlab双杆系统的支撑反力
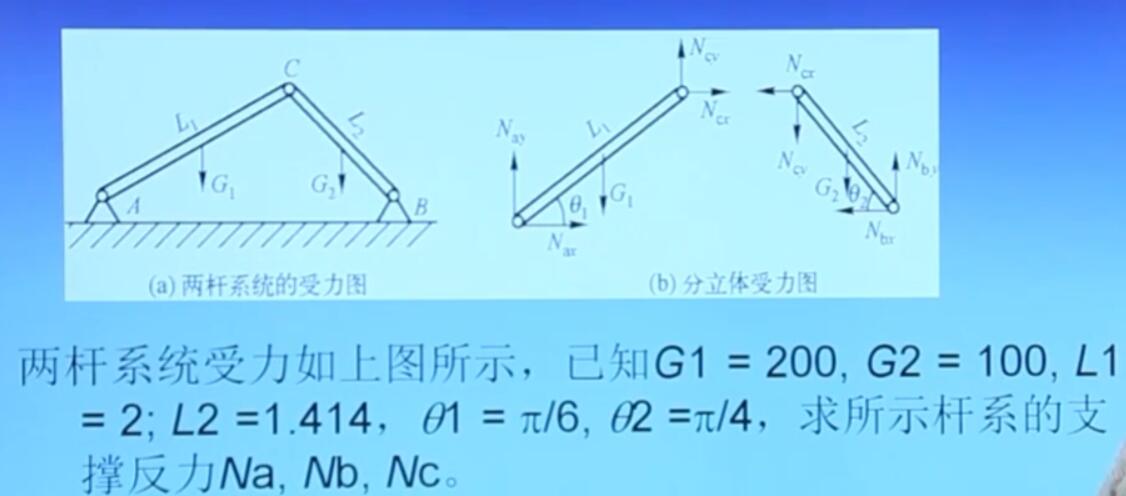
解:画出杆1和2的受力图,如图b所示,其中Na、Nb、Nc都用x、y方向的分量Nax、Nay、Nbx、Nby、Ncx、Ncy表示,于是可列出如下方程:
●对杆件1:
x方向力平衡:∑X=0,Nax+Ncx=0;
y方向力平衡:∑Y=0,Nay+Ncy-G1=0
绕A点力矩平衡:∑Ma=0,NcyL1cosθ1-NcxL1sinθ1-G1L1/2cosθ1=0
●对杆件2:
x方向力平衡:∑X=0,Nbx-Ncx=0;
y方向力平衡:∑Y=0,Nby-Ncy-G2=0
绕B点力矩平衡:∑Mb=0,NcyL2cosθ2+NcxL2sinθ2-+G2L2/2cosθ2=0
综合方程如下:
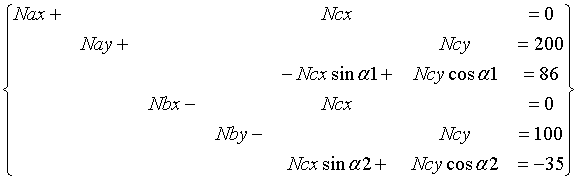
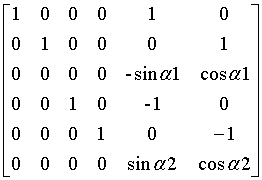
表示成矩阵如下:
 =
= 
设
A =
其中-sinα1=-0.5
cosα1=0.866
sinα2=0.7071
cosα2=0.7071
B=
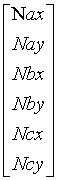
X=
根据矩阵表达式可得:
X=AB
>>
>> A=[1,0,0,0,1.0,0;0,1,0,0,0,1.0;0,0,0,0,-0.5,0.866;0,0,1,0,-1.0,0;0,0,0,1,0,-1.0;0,0,0,0,0.7071,0.7071]
A =
1.0000 0 0 0 1.0000 0
0 1.0000 0 0 0 1.0000
0 0 0 0 -0.5000 0.8660
0 0 1.0000 0 -1.0000 0
0 0 0 1.0000 0 -1.0000
0 0 0 0 0.7071 0.7071
>>
>>
>>
>> B=[0;200;86.6025;0;100;-35.3553]
B =
0
200.0000
86.6025
0
100.0000
-35.3553
>>
>>
>> X=AB
X =
95.0973
154.9032
-95.0973
145.0968
-95.0973
45.0968
>>
>>