1.表达形式:
一个示例有 dd个属性:x⃗ =(x1,x2,...,xd)x=(x1,x2,...,xd),其表达形式为:
f(x)=wTx+b(1.1)f(x)=wTx+b(1.1)
其中w=(w1,w2,...,wd)w=(w1,w2,...,wd)
2.标准线性回归
令预测值与真实值的均方根误差最小化
(w∗,b∗)=argmin(w,b)∑i=1m(f(xi)−yi)2(2.1)(w∗,b∗)=argmin(w,b)i=1∑m(f(xi)−yi)2(2.1)
2.1 线性回归(二元一次函数,此时ww是一个数)
2.1.1均方误差最小化
(w∗,b∗)=argmin(w,b)∑i=1m(w⋅xi+b−yi)2(2.2)(w∗,b∗)=argmin(w,b)i=1∑m(w⋅xi+b−yi)2(2.2)
2.1.2最小二乘参数估计
令:E(w,b)=∑mi=1(w⋅xi+b−yi)2E(w,b)=∑i=1m(w⋅xi+b−yi)2,对w,bw,b求导,令导数为0,解得w,bw,b分别为:
w=∑mi=1yi(xi−x¯)∑mi=1x2i−1m(∑mi=1xi)2(2.3)w=∑i=1mxi2−m1(∑i=1mxi)2∑i=1myi(xi−xˉ)(2.3)
b=1m∑mi=1(yi−wxi)(2.4)b=m1i=1∑m(yi−wxi)(2.4)
2.2 多元线性回归(此时ww是一个向量)
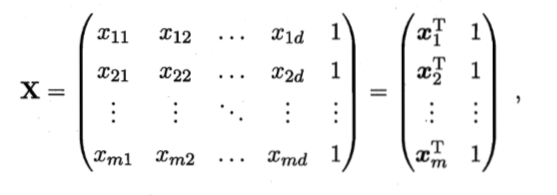
令设训练样本共有mm个,每个样本有dd个属性,把bb与xx写到一起,记为XX,则XX为:
根据向量求模长的公式,可写为
E(w∗,b)=argmin(w∗)(y−X⋅wT)T⋅(y−X⋅wT)(2.5)E(w∗,b)=argmin(w∗)(y−X⋅wT)T⋅(y−X⋅wT)(2.5)
令Ewˆ=(y−X⋅wT)T⋅(y−X⋅wT)Ew^=(y−X⋅wT)T⋅(y−X⋅wT)
考虑矩阵求导:

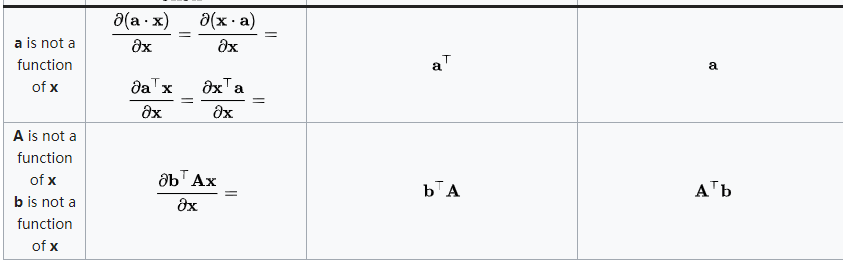
所以,对EwˆEw^求导,有
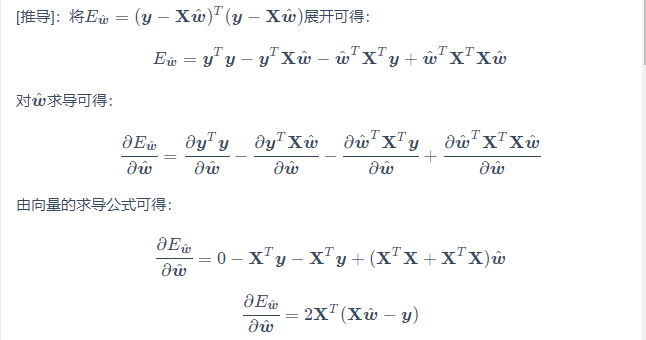
令∂Ewˆ∂wˆ=0∂w^∂Ew^=0,考虑下列两种情况:
- 当XX为满秩矩阵时:
wˆ∗=(XTX)−1XTyw^∗=(XTX)−1XTy,令xˆ=[x,1]x^=[x,1],则学习到的模型为:
f(xˆi)=xˆi(XTX)−1XTy(2.6)f(x^i)=x^i(XTX)−1XTy(2.6)
- 当XX为非满秩矩阵时(数据条数少于未知数个数):
在这样的情况下,可能有多个解(wˆw^)此时需要考虑正则化
3 局部加权线性回归
由于线性回归求的是具有最小均方误差的无偏估计,因此通常伴随着欠拟合的现象,一些方法会在估计方法中加入偏差,降低预测的均方误差。
3.1 基本思想
通过给待预测点附近的每个点赋予一定的权重,然后在这个子集上进行普通的回归(设计代价函数时,待预测点附近的点拥有更高的权重,权重随着距离的增大而缩减——这也就是名字中“局部”和“加权”的由来。)
那么,原本均方误差最小化的表达式为(公式2.2):
(w∗,b∗)=argmin(w,b)∑i=1m(∑j=1pwj⋅xij+b−yi)2(2.2)(w∗,b∗)=argmin(w,b)i=1∑m(j=1∑pwj⋅xij+b−yi)2(2.2)
现在,我们把每一个点都赋予一定的权重(用θiθi表示第ii个点的权重),目标是:离真实值越近,赋予的权重越大。因此,修改公式为:
(w∗,b∗)=argmin(w,b)∑i=1mθi⋅(∑j=1pwj⋅xij+b−yi)2(3.1)(w∗,b∗)=argmin(w,b)i=1∑mθi⋅(j=1∑pwj⋅xij+b−yi)2(3.1)
公式(3.1)对权重ww求导并令其为0:
∂(w∗,b∗)∂w∗→XTWy→W=−2XTθ(y−XW)=0=XTθXW=(XTθX)−1XTθy(3.2)∂w∗∂(w∗,b∗)→XTWy→W=−2XTθ(y−XW)=0=XTθXW=(XTθX)−1XTθy(3.2)
3.2 权重怎么取?
首先明确一点:局部加权线性回归是一个 非参数(non-parametric) 算法。之前学习的(不带权)线性回归算法是有 参数(parametric) 算法,因为它有固定的有限数量的,能够很好拟合数据的参数(权重)。一旦我们拟合出权重并存储了下来,也就不需要再保留训练数据样本来进行更进一步的预测了。相比而言,用局部加权线性回归做预测,我们需要保留整个的训练数据,每次预测得到不同的权重,即参数不是固定的。
术语 “非参数” 粗略意味着:我们需要保留用来代表假设 h的内容,随着训练集的规模变化是呈线性增长的。
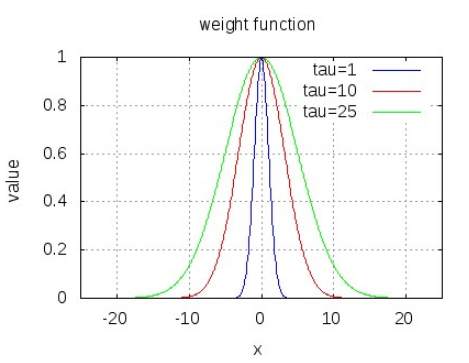
局部加权线性回归使用“核”函数对附近的点赋予更高的权重,目前常用的类型就是高斯核,具体表达式为:
w(i,i)=exp(∣x(i)−x∣2−2k2)(3.3)w(i,i)=exp(−2k2∣x(i)−x∣2)(3.3)
使用高斯核函数具有以下特征:
-
构建了一个只含有对角元素的权重矩阵ww,当点xx与x(i)x(i)越接近,则w(i,i)w(i,i)将会越大,随着样本点与待预测点距离的递增,权重将会以指数级衰减。
-
kk能够控制衰减的速度。若kk越大,则权重的宽度越大,衰减的速度越慢,容易导致欠拟合;若kk越小,则权重的宽度越窄,衰减的速度越快,容易造成过拟合;<当k=1k=1时,可认为是最小二乘法拟合的结果>
通常情况下,通过交叉验证或者网格搜索等方法确定最佳的k值。
为什么高斯核是对角矩阵?
因为在矩阵中,只有对角线上的元素值表示的是x21,x22,...,x2nx12,x22,...,xn2的系数。
4 岭回归
上述两个方法:标准线性回归和局部加权线性回归都有一个重要基础——特征要比样本少,即输入数据的矩阵必须要是满秩矩阵。那么,当矩阵为非满秩矩阵时,都哪些处理方法?
在标准线性回归中,权重的值为:
wˆ∗=(XTX)−1XTyw^∗=(XTX)−1XTy
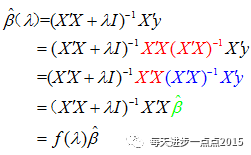
而岭回归的方法是在矩阵XTXXTX上加一个λIλI,即从对XTXXTX的逆转化为对XTX+λIXTX+λI求逆,公式可写为:
wˆ∗=(XTX+λI)−1XTy(4.1)w^∗=(XTX+λI)−1XTy(4.1)
对比公式(2.2)可知,岭回归其实是优化下面这个问题:
(w∗,b∗)=argmin(w,b)∑i=1m(∑j=1pwj⋅xij+b−yi)2+λ∑j=1pw2j(4.2)(w∗,b∗)=argmin(w,b)i=1∑m(j=1∑pwj⋅xij+b−yi)2+λj=1∑pwj2(4.2)
岭回归的意义:
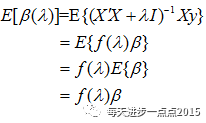
加上了L2范数(目标函数的惩罚函数),作用是确保权重值不会很大,起到收缩的作用。对于岭回归来说,随着λλ的增大,模型的方差会减少(XTX+λIXTX+λI增大,(XTX+λI)−1XTX+λI)−1减小,ww减小,因此偏差增大,因此λλ能够平衡偏差与方差的关系。),·
4.1 岭回归的几何意义
{(w∗,b∗)=argmin(w,b)∑mi=1(∑pj=1wj⋅xij+b−yi)2附加约束条件:λ∑pj=1w2j≤t(4.3){(w∗,b∗)=argmin(w,b)∑i=1m(∑j=1pwj⋅xij+b−yi)2附加约束条件:λ∑j=1pwj2≤t(4.3)
4.1.1 岭回归添加回归系数平方和的原因
为了解决多重共线性的麻烦。作者在《岭回归和LASSO回归的区别》中提到了一个很通俗的例子,一个家庭的收入和支出具有很强的共线性,但是在岭回归系数平方和的约束下,通过调整权重值,即使收入有很大的正数,支出为很小的负数,最后预测的结果也不会有较大的偏差,这就是岭回归系数平方和约束的作用。
4.1.2 岭回归系数的性质
0时,岭回归系数具有压缩性">
4.1.3 岭参数的选择
我们知道岭回归系数会随着λλ的变化而变化,为保证选择出最佳的岭回归系数,该如何确定这个λλ值呢?一般我们会选择定性的可视化方法和定量的统计方法。对这种方法作如下说明:
1)绘制不同λλ值与对应的ββ值之间的折线图,寻找那个使岭回归系数趋于稳定的λλ值;同时与OLS相比,得到的回归系数更符合实际意义;
2)方差膨胀因子法,通过选择最佳的λλ值,使得所有方差膨胀因子不超过10;
3)虽然λλ的增大,会导致残差平方和的增加,需要选择一个λλ值,使得残差平方和趋于稳定(即增加幅度细微)。
5 lasso 回归
上文提到,岭回归增加的约束是∑pk=1β2k≤t∑k=1pβk2≤t,那么在lasso回归中,添加的约束条件为:∑pk=1∣βk∣≤t∑k=1p∣βk∣≤t
(w∗,b∗)=argmin(w,b)∑i=1m(∑j=1pwj⋅xij+b−yi)2+λ∑j=1p∣wj∣(5.1)(w∗,b∗)=argmin(w,b)i=1∑m(j=1∑pwj⋅xij+b−yi)2+λj=1∑p∣wj∣(5.1)
若采用这种约束,当λλ足够小的时候,一些系数会因此衰减为0。
但是,在新的约束条件下,若要解出回归系数,则需要使用二次规划法算法
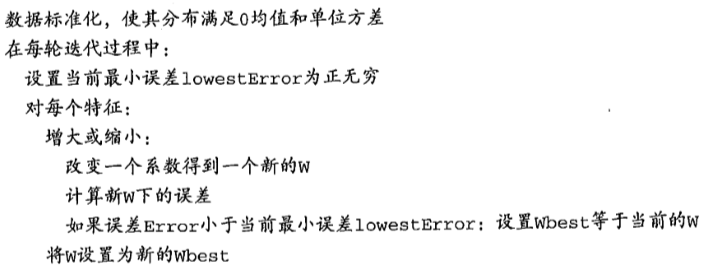
6 前向逐步回归
前向逐步回归算法利用了贪心算法的思想,具体算法伪代码如下:
代码实现
github翻我牌子