驱动开发之I2C总线:
I2C:数据线和时钟线。
起始信号:时钟线为高电平,数据线由高到低跳变。
结束信号:时钟线为高电平,数据线由低到高跳变。
应答信号:第九个时钟周期,时钟线保持为高电平,数据线为低电平,此时为成功应答。
读写位:站在主机的角度考虑。
0代表主机给从机发送数据。
1代表主机接收从机的数据。
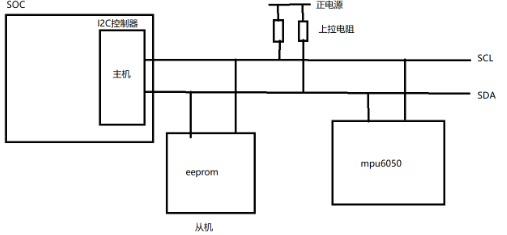
硬件原理:
数据帧的封装:
主机给从机发送数据:
起始信号 + 7位从机地址 写位 + 从机给主机应答 + 主机给从机发送8位数据
+ 从机给主机应答 ... + 主机给从机发送8位数据 + 从机给主机应答 + 结束信号。
主机读取从机数据:
起始信号 + 7位从机地址 读位 + 从机给主机应答 + 从机给主机发送数据 +
主机给从机应答 + ..... + 结束信号
主机先写数据再读数据:
起始信号 + 7位从机地址 写位 + 从机给主机应答 + 主机给从机发送数据 + 从机给主机应答 ...
+ 起始信号 + 7位从机地址 读位 + 从机给主机应答 ... + 结束信号。
具体的读写数据帧应该去查看芯片手册中的读写时序。
MPU6050时序:
to write the internal MPU-60X0 registers, the master transmits the start condition (S), followed by the I 2 C address and the write bit (0). At the 9 th clock cycle (when the clock is high), the MPU-60X0 acknowledges the transfer. Then the master puts the register address (RA) on the bus. After the MPU-60X0 acknowledges the reception of the register address, the master puts the register data onto the bus. This is followed by the ACK signal, and data transfer may be concluded by the stop condition (P).
写时序:S + 从机地址 0(写) + ACK + 从机的寄存器地址 + ACK + 寄存器数据 + ACK + P
注:封装数据帧时从机地址不是数据,从机的寄存器地址为数据。
To read the internal MPU-60X0 registers, the master sends a start condition, followed by the I 2 C address and a write bit, and then the register address that is going to be read. Upon receiving the ACK signal from the MPU-60X0, the master transmits a start signal followed by the slave address and read bit. As a result, the MPU-60X0 sends an ACK signal and the data. The communication ends with a not acknowledge (NACK) signal and a stop bit from master.
读时序:S + 从机地址 0 (写)+ ACK + 主机将要读取的寄存器地址 + ACK + 起始信号 + 从机地址 1(读)+ ACK + 数据 + 非应答 + 结束信号
注:主机从从机读取数据前要告诉从机要读哪个寄存器的数(写),然后从机将数据保存到某个地方供给主机去读取数据。
内核中的I2C子系统:
总线驱动层:厂家实现的,总线驱动层知道如何操作数据,但是不知道操作哪些数据。
核心层:承上启下,提供接口实现设备和总线数据交互
设备驱动层:自己实现,设备驱动知道操作哪些数据,但是不知道如何操作数据。
核心点:设备驱动中一定需要封装数据,交给总线驱动。
i2c总线的驱动结构体:
1 struct i2c_driver
2 {
3 int (*probe)(struct i2c_client *, const struct i2c_device_id *);//如果设备和驱动匹配成功,则执行probe函数。
4 int (*remove)(struct i2c_client *);
5 struct device_driver driver;
6 const struct i2c_device_id *id_table;
7 };
1 struct device_driver
2 {
3 const char *name;//可以用来匹配,主要用来在/sys/bus/i2c/drivers目录下创建文件夹
4 const struct of_device_id *of_match_table;//用来和设备树匹配。
5 };
1 struct i2c_device_id
2 {
3 char name[];//专门用来和设备匹配,但是i2c总线这个位置特殊,这个字符串必须存在。和i2c_client中的name比较结果成立不成立无所谓。
4 };
1 struct i2c_client {//描述i2c的设备信息(并不是真正的设备信息)
2 unsigned short flags;//代表读写位
3 unsigned short addr;//从机地址
4 char name[I2C_NAME_SIZE];//字符串,如果使用设备树不用于匹配。
5 struct i2c_adapter *adapter;//指向了正在使用的i2c适配器
6 };
7 //设备树转化成c代表后先将信息保存到struct i2c_board_info中,再将struct i2c_board_info内容复制到i2c_client中。
I2C驱动接口:
1 i2c_add_driver();//注册驱动
2 i2c_del_driver();//注销驱动
内核源码分析:
1 进入i2c的总线驱动层:
2 vi drivers/i2c/busses/i2c-s3c2410.c
3 控制了起始状态,从机地址,读写位,使能了应答位,提供了读写数据的方法。
4
5 进入i2c的核心层:
6 vi drivers/i2c/i2c-core.c
7 static int __init i2c_init(void)
8 {
9 retval = bus_register(&i2c_bus_type);
10 i2c_adapter_compat_class = class_compat_register("i2c-adapter");
11 retval = i2c_add_driver(&dummy_driver);
12 }
13
14 -->#define i2c_add_driver(driver),i2c_register_driver(THIS_MODULE, driver)
15
16 struct bus_type i2c_bus_type = {
17 .name = "i2c",
18 .match = i2c_device_match,
19 .probe = i2c_device_probe,
20 };
21
22
23 --> res = driver_register(&driver->driver);
24
25
26 -->other = driver_find(drv->name, drv->bus);//查找i2c的某个名称的驱动是否被注册
27 ret = bus_add_driver(drv);//如果没有被注册,我们才可以注册
28
29
30 -->error = driver_attach(drv);
31
32
33 -->return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
34
35
36 --> if (!driver_match_device(drv, dev))
37
38
39 return drv->bus->match ? drv->bus->match(dev, drv) : 1;
40
41
42 --> struct bus_type i2c_bus_type = {
43 .name = "i2c",
44 .match = i2c_device_match, //提供匹配方法
45 };
46 driver_probe_device(drv, dev);
47
48
49 -->ret = really_probe(dev, drv);
50
51
52 --> if (dev->bus->probe) {
53 --> ret = dev->bus->probe(dev);
54 执行i2c_bus_type中的probe接口
55
56
57 -->status = driver->probe(client, i2c_match_id(driver->id_table, client))
58 //自己封装的probe接口
I2C设备树添加:
1 vi exynos4412-origen.dts:
2 i2c@13860000 {//描述i2c总线
3 #address-cells = <1>;
4 #size-cells = <0>;
5 samsung,i2c-sda-delay = <100>;
6 samsung,i2c-max-bus-freq = <20000>;
7 pinctrl-0 = <&i2c0_bus>;
8 pinctrl-names = "default";
9 status = "okay";
10
11 s5m8767_pmic@66 { //描述i2c从机设备
12 compatible = "samsung,s5m8767-pmic";
13 reg = <0x66>;
14 ..................
15 };
-------->>>>>
查看原理图找到I2C_SDA5 I2C_SCL5,说明使用的是I2C总线控制器5
查看芯片手册I2CCONn 对应的地址:0x13860000 0x13870000 ......
自己的I2C总线控制器节点:
1 i2c@138B0000
2 {
3 #address-cells = <1>;
4 #size-cells = <0>;
5 samsung,i2c-sda-delay = <100>;//三星平台下i2c总线的数据线高低电平跳变延时时间为100ns
6 samsung,i2c-max-bus-freq = <100000>;//三星平台下,i2c总线的数据输出速率为100kbit/s
7
8 pinctrl-0 = <&i2c5_bus>;
9 pinctrl-names = "default";
10
11 status = "okay";//当前总线的状态为可用状态
12 mpu6050@68{
13 compatible = "fs4412,mpu6050";
14 reg = <0x68>;
15 };
16 };
pinctrl-0 = <&i2c0_bus>;
pinctrl-1 = <&b>;b索引的引脚必须是idle状态
pinctrl-2 = <&c>;c索引的引脚必须是sleep状态
pinctrl-names = "default","idle","sleep";//代表了当前节点使用的引脚状态为默认状态。
//代表了当前节点使用的引脚状态为空闲状态。
//代表了当前节点使用的引脚状态为深度睡眠状态。
i2c5_bus索引一个设备树节点,节点中会有一组指定的引脚。
1 vi exynos4x12-pinctl.dtsi
2 i2c5_bus: i2c5-bus {
3 samsung,pins = "gpb-2", "gpb-3";//指定使用了GPBCON对应的一组寄存器
4 samsung,pin-function = <3>;//指定GPBCON [2]和[3]值为3,描述数据线和时钟线
5 samsung,pin-pud = <3>;//将GPBPUD设置为使能上拉
6 samsung,pin-drv = <0>;//操作了GPBDRV寄存器,值为0,使用1倍电流强度
7 };
mpu6050:
功能:加速度计(x,y,z三轴的值)、角速度计(x,y,z三轴的值)、温度计
1 int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) //间接调用i2c总线驱动(通过核心层)
1 //封装数据帧结构体
2 struct i2c_msg {
3 __u16 addr; //从机地址
4 __u16 flags;//读写位
5 __u16 len;//读或者写的数据字节数
6 __u8 *buf;//读:用来存放数据 写:存放需要写入的数据
7 };
8 //有几个起始信号就有几个i2c_msg结构体,所以这个通常是一个结构体数组
封装写时序:
S + 从机地址 0 + 成功应答 + 从机的寄存器地址 + 成功应答 + 寄存器数据 + ACK + P
读时序:
S + 从机地址 0 + ACK + 主机将要读取的寄存器地址 + ACK + S + 从机地址 1 + ACK + 数据 + 非应答 + 结束信号
mpu6050参考代码:


1 #ifndef _HEAD_H_ 2 #define _HEAD_H_ 3 4 //控制类寄存器,往以下寄存器中写入实验值 5 #define SMPLRT_DIV 0x19 //采样率分频,典型值:0x07(125Hz) */ 6 #define CONFIG 0x1A // 低通滤波频率,典型值:0x06(5Hz) */ 7 #define GYRO_CONFIG 0x1B // 陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) */ 8 #define ACCEL_CONFIG 0x1C // 加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz) */ 9 #define PWR_MGMT_1 0x6B // 电源管理,典型值:0x00(正常启用) */ 10 11 //数据类寄存器,读出以下寄存器的内容,给应用层传递 12 #define TEMP_OUT_H 0x41 // 存储的最近温度传感器的测量值 */ 13 #define TEMP_OUT_L 0x42 14 15 #define GYRO_XOUT_H 0x43 // 存储最近的X轴、Y轴、Z轴陀螺仪感应器的测量值 */ 16 #define GYRO_XOUT_L 0x44 17 #define GYRO_YOUT_H 0x45 18 #define GYRO_YOUT_L 0x46 19 #define GYRO_ZOUT_H 0x47 20 #define GYRO_ZOUT_L 0x48 21 22 #define ACCEL_XOUT_H 0x3B // 存储最近的X轴、Y轴、Z轴加速度感应器的测量值 */ 23 #define ACCEL_XOUT_L 0x3C 24 #define ACCEL_YOUT_H 0x3D 25 #define ACCEL_YOUT_L 0x3E 26 #define ACCEL_ZOUT_H 0x3F 27 #define ACCEL_ZOUT_L 0x40 28 29 //封装联合体 30 union mpu6050 31 { 32 //加速度 33 struct mpu6050_accel 34 { 35 unsigned short x; 36 unsigned short y; 37 unsigned short z; 38 }accel; 39 //角速度 40 struct mpu6050_gyro 41 { 42 unsigned short x; 43 unsigned short y; 44 unsigned short z; 45 }gyro; 46 //温度 47 unsigned short temp; 48 }; 49 //命令的封装 50 #define ACCEL_CMD _IOR('x',0,union mpu6050) 51 #define GYRO_CMD _IOR('x',1,union mpu6050) 52 #define TEMP_CMD _IOR('x',2,union mpu6050) 53 54 #endif
1 #include <stdio.h> 2 #include <sys/types.h> 3 #include <sys/stat.h> 4 #include <fcntl.h> 5 #include <sys/ioctl.h> 6 #include "head.h" 7 8 int main(int argc, const char *argv[]) 9 { 10 int fd; 11 12 fd = open("/dev/mpu6050",O_RDWR); 13 14 union mpu6050 data; 15 while(1) 16 { 17 ioctl(fd,ACCEL_CMD,&data); 18 printf("ACCEL:x = %d,y = %d,z = %d ",data.accel.x,data.accel.y,data.accel.z); 19 20 ioctl(fd,GYRO_CMD,&data); 21 printf("GYRO:x = %d,y = %d,z = %d ",data.gyro.x,data.gyro.y,data.gyro.z); 22 23 ioctl(fd,TEMP_CMD,&data); 24 printf("TEMP:%d ",data.temp); 25 sleep(1); 26 } 27 return 0; 28 }
1 #include <linux/init.h> 2 #include <linux/module.h> 3 #include <linux/fs.h> 4 #include <linux/i2c.h> 5 #include <linux/device.h> 6 #include <asm/uaccess.h> 7 #include "head.h" 8 9 10 11 int major; 12 struct class *cls;//定义设备类结构体 13 struct device *devs;//定义设备文件结构体 14 struct i2c_client *glo_client;//定义描述i2c的设备信息结构体 15 16 void write_data(unsigned char reg,unsigned char val) 17 { 18 char wbuf[2] = {reg,val}; 19 //根据mpu6050手册封装写时序 20 // S + 从机地址 0 + 成功应答 + 从机的寄存器地址 + 21 //成功应答 + 寄存器数据 + ACK + P 22 //有几个起始信号就有几个i2c_msg结构体, 23 struct i2c_msg msg[1] = {//1代表着开始位的个数 24 { 25 .addr = glo_client->addr,//client结构体中存放了其从机的物理地址 26 .flags = 0,//0位写数据,1为读时序 27 .len = 2,//写的数据的字节数(从机寄存器地址+寄存器数据) 28 .buf = wbuf,//写入到wbuf中 29 }, 30 }; 31 //间接调用i2c总线驱动 32 i2c_transfer(glo_client->adapter,msg,ARRAY_SIZE(msg));//计算msg结构体的大小 33 } 34 //给应用层的read函数提供接口 35 unsigned char read_data(unsigned char reg) 36 { 37 unsigned char rbuf[1];//从机将数据存到rbuf中供给主机读取数据 38 unsigned char wbuf[1] = {reg};//主机将要读取的寄存器地址 39 //S + 从机地址 0 + ACK + 主机将要读取的寄存器地址 + ACK + 40 // S + 从机地址 1 + ACK + 数据 + 非应答 + 结束信号 41 //主机开始告诉从机要读哪个寄存器的数据,然后从机将寄存器数据存到rbuf中供给主机读取数据 42 struct i2c_msg msg[2] = { 43 { 44 .addr = glo_client->addr,//获取从机的物理地址 45 .flags = 0,//写 46 .len = 1,//只写入一个地址8bit 47 .buf = wbuf, 48 }, 49 { 50 .addr = glo_client->addr, 51 .flags = 1,//读功能 52 .len = 1, 53 .buf = rbuf, 54 }, 55 }; 56 i2c_transfer(glo_client->adapter,msg,ARRAY_SIZE(msg));//间接调用i2c总线驱动 57 return rbuf[0];//将读取到的数据返回 58 } 59 //用于和设备树匹配 60 struct of_device_id mpu6050_match_tbl[] = { 61 { 62 .compatible = "fs4412,mpu6050", 63 }, 64 {},//不能省略否则可能出现段错误 65 }; 66 67 int mpu6050_open(struct inode *inode,struct file *filp) 68 { 69 return 0; 70 } 71 72 //功能选择 73 long mpu6050_ioctl(struct file *filp,unsigned int cmd,unsigned long arg) 74 { 75 int ret; 76 union mpu6050 data;//定义联合体变量 77 switch(cmd) 78 { 79 case ACCEL_CMD://加速的 80 data.accel.x = read_data(ACCEL_XOUT_L);//数据第八位 81 data.accel.x |= read_data(ACCEL_XOUT_H) << 8;//数据高8位|第8位 = 16位数据 82 data.accel.y = read_data(ACCEL_YOUT_L); 83 data.accel.y |= read_data(ACCEL_YOUT_H) << 8; 84 data.accel.z = read_data(ACCEL_ZOUT_L); 85 data.accel.z |= read_data(ACCEL_ZOUT_H) << 8; 86 break; 87 case GYRO_CMD://角速度 88 data.gyro.x = read_data(GYRO_XOUT_L); 89 data.gyro.x |= read_data(GYRO_XOUT_H) << 8; 90 data.gyro.y = read_data(GYRO_YOUT_L); 91 data.gyro.y |= read_data(GYRO_YOUT_H) << 8; 92 data.gyro.z = read_data(GYRO_ZOUT_L); 93 data.gyro.z |= read_data(GYRO_ZOUT_H) << 8; 94 break; 95 case TEMP_CMD://温度 96 data.temp = read_data(TEMP_OUT_L); 97 data.temp |= read_data(TEMP_OUT_H) << 8; 98 break; 99 } 100 //将数据拷贝到arg地址中供给应用层处理 101 ret = copy_to_user((void *)arg,&data,sizeof(data)); 102 return 0; 103 } 104 //文件操作结构体 105 struct file_operations fops = { 106 .open = mpu6050_open, 107 .unlocked_ioctl = mpu6050_ioctl, 108 }; 109 110 int mpu6050_probe(struct i2c_client *client,const struct i2c_device_id *id) 111 { 112 printk("match ok "); 113 114 glo_client = client; 115 116 //字符设备框架搭建 117 major = register_chrdev(0,"mpu6050",&fops); 118 cls = class_create(THIS_MODULE,"mpu6050"); 119 devs = device_create(cls,NULL,MKDEV(major,0),NULL,"mpu6050"); 120 121 write_data(SMPLRT_DIV,0x07);//将特定数据写入到控制类寄存器中 122 write_data(CONFIG,0x06); 123 write_data(GYRO_CONFIG,0x18); 124 write_data(ACCEL_CONFIG,0x01); 125 write_data(PWR_MGMT_1,0x00); 126 return 0; 127 } 128 129 int mpu6050_remove(struct i2c_client *client) 130 { 131 return 0; 132 } 133 //和platform的区别是platform可以没有这个结构体但是I2C必须不能少 134 struct i2c_device_id mpu6050_id_tbl[] = { 135 { 136 .name = "xxx",//名字不重要 137 }, 138 }; 139 140 //定义i2c驱动结构体 141 struct i2c_driver mpu6050_pdrv = { 142 .driver = { 143 .name = "fs4412-mpu6050", 144 .of_match_table = mpu6050_match_tbl, 145 }, 146 147 .probe = mpu6050_probe,//探测函数 148 .remove = mpu6050_remove, 149 //id_table不能省略!!!(和i2c_client中的name比较结果成立不成立无所谓) 150 .id_table = mpu6050_id_tbl, 151 }; 152 153 #if 0 154 int mpu6050_init(void) 155 { 156 i2c_add_driver(&mpu6050_pdrv); 157 return 0; 158 } 159 module_init(mpu6050_init); 160 161 void mpu6050_exit(void) 162 { 163 i2c_del_driver(&mpu6050_pdrv); 164 return; 165 } 166 module_exit(mpu6050_exit); 167 #endif 168 //封装模块2要素函数接口包括注册和卸载i2c总线驱动 169 module_i2c_driver(mpu6050_pdrv); 170 MODULE_LICENSE("GPL");
总结:
1 I2C总线: 2 起始信号:时钟线为高电平,数据线由高到低跳变 3 结束信号:时钟线为高电平,数据线由低到高跳变 4 5 应答信号:在第九个时钟周期,时钟线保持为高电平,数据线为低电平。 6 读写位:站在主机的角度考虑,0代表写 1代表读 7 8 从机地址:高7位为从机地址(查看设备的芯片手册) 9 b110100x,最低位由AD0引脚状态决定 10 b1101000 11 12 数据帧的封装: 13 写时序:S + 从机地址 0 + 从机给主机应答 + 8位从机的寄存器地址 + 应答信号 + 8位寄存器数据 + 应答信号 + P 14 15 读时序:S + 从机地址 0 + 应答信号 + 8位从机的寄存器地址 + 应答信号 + S + 从机地址 1 + 16 应答信号 + 8位寄存器数据 + 非应答 + P 17 18 内核中的I2C子系统: 19 总线驱动:厂家实现 drivers/i2c/busses/i2c-s3c2410.c 20 知道如何操作数据,但是不知道操作哪些数据 21 核心层:内核实现 drivers/i2c/i2c-core.c 22 设备驱动:自己实现 23 知道操作哪些数据,但是不知道如何操作数据 24 封装数据(struct i2c_msg),提交给总线驱动(调用核心层的函数来向上提交) 25 26 struct i2c_driver 27 { 28 struct device_driver driver; 29 30 int (*probe)(struct i2c_client *,const struct i2c_device_id *); 31 int (*remove)(struct i2c_client *); 32 33 struct i2c_device_id *id_table;//必须要初始化,内容不重要。 34 }; 35 36 struct device_driver 37 { 38 const char *name;用来在/sys/bus/i2c/drivers下创建文件夹 39 const struct of_device_id *of_match_table;//用来和设备树匹配 40 }; 41 42 struct i2c_client 描述的是i2c的设备信息 43 { 44 unsignd short flags;//控制读写位 45 unsignd short addr;//控制从机地址 46 struct i2c_adapter *adapter;//指向i2c控制器 47 }; 48 49 i2c_add_driver(struct i2c_driver *);注册驱动 50 i2c_del_driver(struct i2c_driver *);注销驱动 51 52 module_i2c_driver();//包含了模块的加载和卸载函数,以及注册和注销驱动 53 54 搭建I2C框架: 55 定义出probe和remove函数 56 57 struct i2c_driver pdrv = { 58 .driver = { 59 .name = , 60 .of_match_table = , 61 }, 62 .probe = , 63 .remove = , 64 }; 65 module_i2c_driver(pdrv); 66 67 添加设备树的信息: 68 设备树源文件中默认有一个i2c节点,i2c@13860000 69 70 当前要操作的mpu6050挂载到i2c总线上的。i2c总线本身也是一种设备。 71 72 查看原理图:I2C_SDA5 I2C_SCL5 使用的是i2c的第五个总线控制器 73 74 i2c@138B0000{ 75 #address-cells = <1>;当前节点的子节点中reg属性有1个地址 76 #size-cells = <0>;当前节点的子节点中reg属性有0个偏移量 77 78 samsung,i2c总线时间值 = <100>; 79 samsung,i2c数据传输速率 = <100000>;手册中规定的,标准模式下为100kbit/s 80 81 pinctrl-0 = <&i2c5_bus>;//描述了具体的引脚值 82 pinctrl-names = "default";//需要使引脚状态为默认状态 83 84 status = "okey";//当前总线状态为可用状态 85 86 mpu6050@68{ 87 compatible = ","; 88 reg = <从机地址>; 89 }; 90 }; 91 92 封装struct i2c_msg结构体 93 有几个起始信号就有几个i2c_msg结构体 94 写时序:S + 从机地址 0 + 从机给主机应答 + 8位从机的寄存器地址 + 应答信号 + 8位寄存器数据 + 应答信号 + P 95 96 unsignd char wbuf[] = {寄存器地址,寄存器的值}; 97 struct i2c_msg msg[1] = { 98 { 99 .addr = 从机地址, 100 .flags = 0, 101 .len = 2, 102 .buf = wbuf, 103 }, 104 }; 105 i2c_transfer(glo_client->adapter,msg,ARRAY_SIZE(msg)); 106 107 108 读时序:S + 从机地址 0 + 应答信号 + 8位从机的寄存器地址 + 应答信号 + S + 从机地址 1 + 109 应答信号 + 8位寄存器数据 + 非应答 + P 110 111 unsignd char wbuf[] = {reg}; 112 unsignd char rbuf[1]; 113 struct i2c_msg msg[2] = { 114 { 115 .addr = 从机地址, 116 .flags = 0, 117 .len = 1, 118 .buf = wbuf, 119 }, 120 { 121 .addr = , 122 .flags = 1, 123 .len = 1, 124 .buf = rbuf, 125 }, 126 }; 127 i2c_transfer(glo_client->adapter,msg,ARRAY_SIZE(msg)); 128 return rbuf[0];