一原理和初始化过程:
SPI(Serial Peripheral Interface),串行外围设备接口。SPI是一种高速的、全双工、同步的通信总线。
SPI接口一般使用4条线通信:
MISO 主设备数据输入,从设备数据输出
MOSI 主设备数据输出,从设备数据输入
SCLK 时钟信号,有主设备产生
CS 从设备片选信号,有主设备控制
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置。SPI_CR寄存器的CPOL(时钟极性)位,控制在没有数据传输时时钟的空闲状态电平,此位对主模式和从模式下的设备都有效。CPOL=0,串行同步时钟的空闲状态为低电平;CPOL=1,串行同步时钟的空闲状态为高电平。SPI_CR寄存器的CPHA(时钟相位)位,能配置用于选择两种不同的传输协议之一进行数据传输。CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
1.SPI主模式配置步骤
①使能SPI时钟,配置PA口

APB2外设时钟使能寄存器(RCC_APB2ENR)
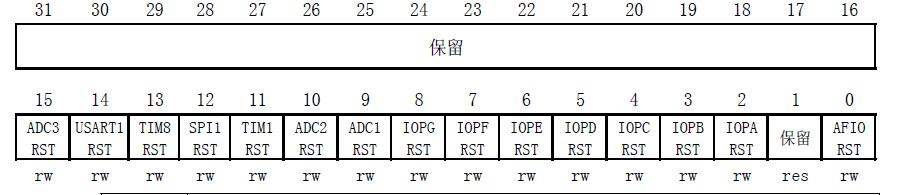
APB1外设复位寄存器 (RCC_APB1RSTR)
Eg:RCC->APB2ENR|=1<<2; //PORTA时钟使能
RCC->APB2ENR|=1<<12; //SPI1时钟使能
//这里只针对SPI口初始化
GPIOA->CRL&=0X000FFFFF;
GPIOA->CRL|=0XBBB00000;//PA5.6.7复用
GPIOA->ODR|=0X7<<5; //PA5.6.7上拉
②开全双工模式并软件管理NSS
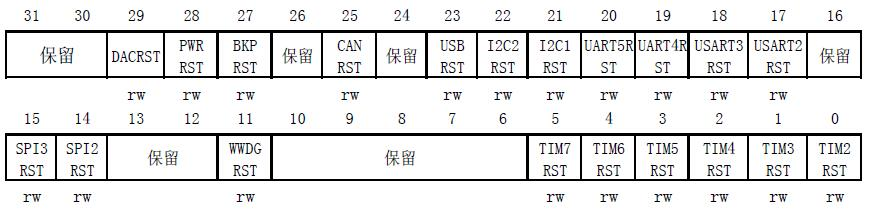
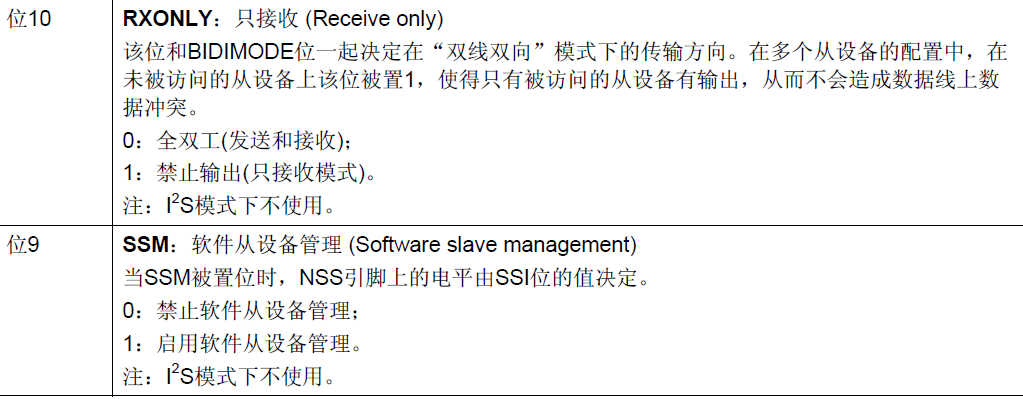
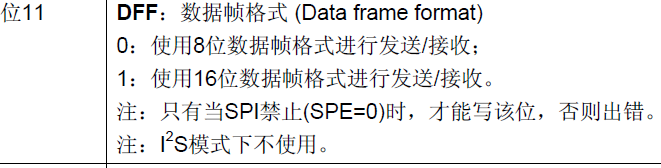
SPI控制寄存器1(SPI_CR1)(I2S模式下不使用)

![]()
Eg:SPI1->CR1|=0<<10;//全双工模式
SPI1->CR1|=1<<9; //软件nss管理
SPI1->CR1|=1<<8;
③设置SPI为主机并设置数据帧格式
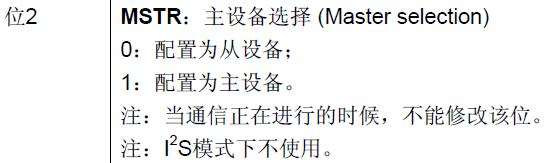
Eg:SPI1->CR1|=1<<2; //SPI主机
SPI1->CR1|=0<<11;//8bit数据格式
④设置时钟极性和相位极性
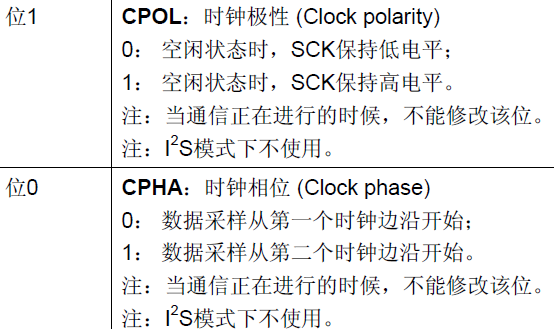
Eg:SPI1->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1
SPI1->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1
⑤传输速率和LSBFIRST帧格式设置
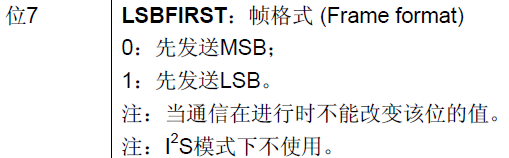

Eg:SPI1->CR1|=7<<3; //Fsck=Fcpu/256
SPI1->CR1|=0<<7; //MSBfirst
⑥使能SPI
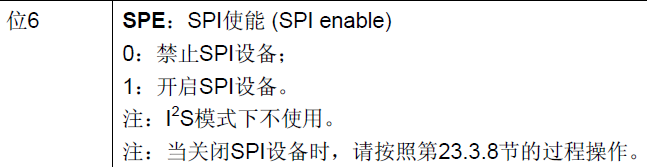
Eg:SPI1->CR1|=1<<6; //SPI设备使能
二:初始化 库函数操作
void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTBʱÖÓʹÄÜ
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2ʱÖÓʹÄÜ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15¸´ÓÃÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//³õʼ»¯GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2, ENABLE);
SPI2_ReadWriteByte(0xff);
}
寄存器操作。。。
void SPI1_Init(void)
4 {
5 RCC->APB2ENR|=1<<2; //PORTA时钟使能
6 RCC->APB2ENR|=1<<12; //SPI1时钟使能
7
8 //这里只针对SPI口初始化
9 GPIOA->CRL&=0X000FFFFF;
10 GPIOA->CRL|=0XBBB00000;//PA5.6.7复用
11 GPIOA->ODR|=0X7<<5; //PA5.6.7上拉
12
13 SPI1->CR1|=0<<10;//全双工模式
14 SPI1->CR1|=1<<9; //软件nss管理
15 SPI1->CR1|=1<<8;
16
17 SPI1->CR1|=1<<2; //SPI主机
18 SPI1->CR1|=0<<11;//8bit数据格式
19 SPI1->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1
20 SPI1->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1
21 SPI1->CR1|=7<<3; //Fsck=Fcpu/256
22 SPI1->CR1|=0<<7; //MSBfirst
23 SPI1->CR1|=1<<6; //SPI设备使能
24 SPI1_ReadWriteByte(0xff);//启动传输(主要作用:维持MOSI为高)
25 }
26 //SPI1 速度设置函数
27 //SpeedSet:0~7
28 //SPI速度=fAPB2/2^(SpeedSet+1)
29 //APB2时钟一般为72Mhz
30 void SPI1_SetSpeed(u8 SpeedSet)
31 {
32 SpeedSet&=0X07; //限制范围
33 SPI1->CR1&=0XFFC7;
34 SPI1->CR1|=SpeedSet<<3; //设置SPI1速度
35 SPI1->CR1|=1<<6; //SPI设备使能
36 }
37 //SPI1 读写一个字节
38 //TxData:要写入的字节
39 //返回值:读取到的字节
40 u8 SPI1_ReadWriteByte(u8 TxData)
41 {
42 u16 retry=0;
43 while((SPI1->SR&1<<1)==0)//等待发送区空
44 {
45 retry++;
46 if(retry>0XFFFE)return 0;
47 }
48 SPI1->DR=TxData; //发送一个byte
49 retry=0;
50 while((SPI1->SR&1<<0)==0) //等待接收完一个byte
51 {
52 retry++;
53 if(retry>0XFFFE)return 0;
54 }
55 return SPI1->DR;
56 }
四 main函数
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "flash.h"
const u8 TEXT_Buffer[]={0x21,0x23};
#define SIZE sizeof(TEXT_Buffer)
int main(void)
{
u8 key;
u16 i=0;
u8 datatemp[SIZE];
u32 FLASH_SIZE;
delay_init();
NVIC_Configuration();
uart_init(9600);
LED_Init();
KEY_Init();
SPI_Flash_Init();
while(SPI_Flash_ReadID()!=W25Q64)
{
LED0=!LED0;
}
FLASH_SIZE=8*1024*1024;
while(1)
{
datatemp[0] = 0;
datatemp[1] = 0;
key=KEY_Scan(0);
if(key==KEY_UP)
{
SPI_Flash_Write((u8*)TEXT_Buffer,FLASH_SIZE-100,SIZE);
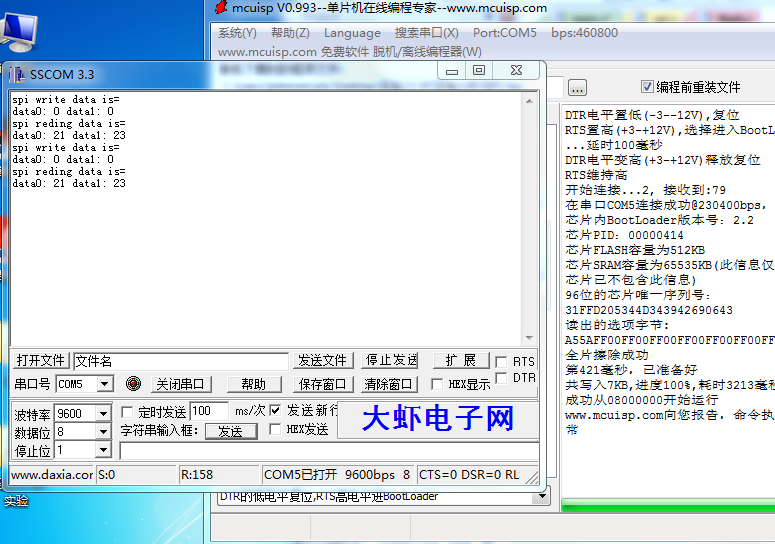
printf("spi write data is=
");
printf("data0: %x data1: %x
",datatemp[0],datatemp[1]);
}
if(key==KEY_DOWN)
{
SPI_Flash_Read(datatemp,FLASH_SIZE-100,SIZE);
printf("spi reding data is=
");
printf("data0: %x data1: %x
",datatemp[0],datatemp[1]);
}
i++;
delay_ms(100);
if(i==20)
{
LED1=!LED1;//system runing
i=0;
}
}
}
五 实验结果
六 扩展
还需要发送不同的数据类型。