摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。
本问主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及陀螺仪信息。
一、实验准备
1.实验环境
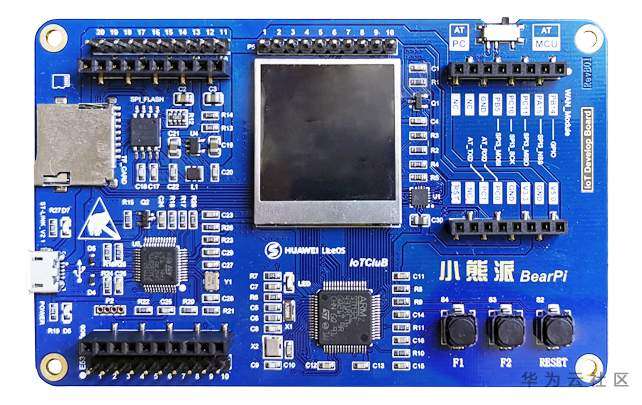
- 一块stm32开发板(推荐使用小熊派),以及数据线
- 已经安装STM32CubeMX
- 已经安装KeilMDK,并导入stm32开发板对应的芯片包(小熊派使用的是STM32L431RCT6)
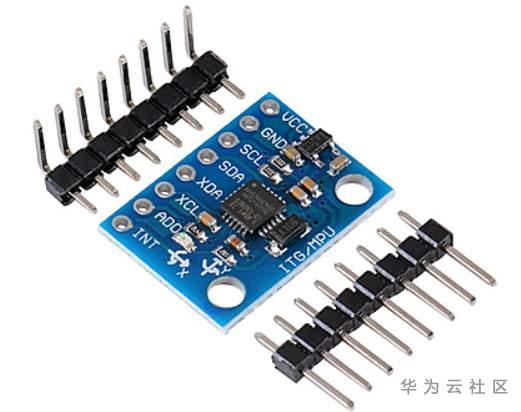
- 一个MPU6050模块(IIC接口)以及杜邦线
2.目标效果
- 通过CubeMX创建工程并配置参数
- IIC方式通信,配置MPU6050寄存器
- 小熊派通过IIC,获取陀螺仪、加速度计数据
- 串口1重定向输出编码器转动的角度、角速度
二、通过CubeMX生产MDK工程
A.芯片选择
- 打开CubeMX,进入芯片选择:
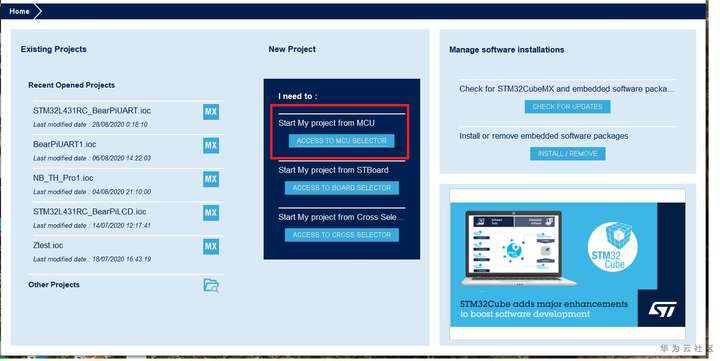
- 选择自己的stm32芯片(即STM32L431RCT6):

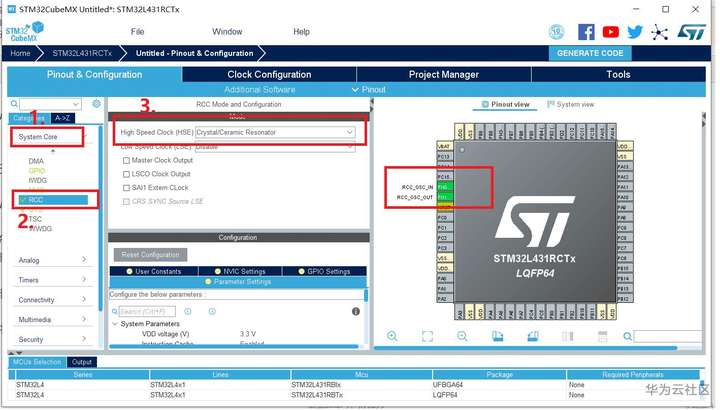
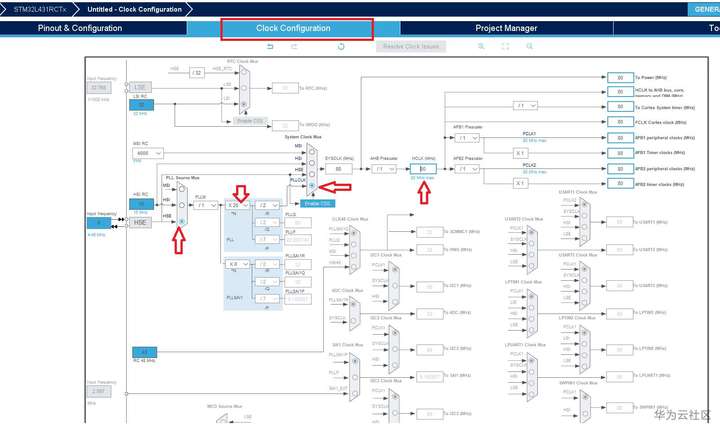
B.时钟源RCC设置
- 更改系统时钟源
系统时钟默认使用内部的高速时钟(HSI),选择使用HSE,时钟更精确
- 设置外部时钟对应的端口
- 配置时钟树
STM32L431RCT6系统时钟最大可以为80MHz,我们配置到最大即可
C.参数配置(对应端口设置)
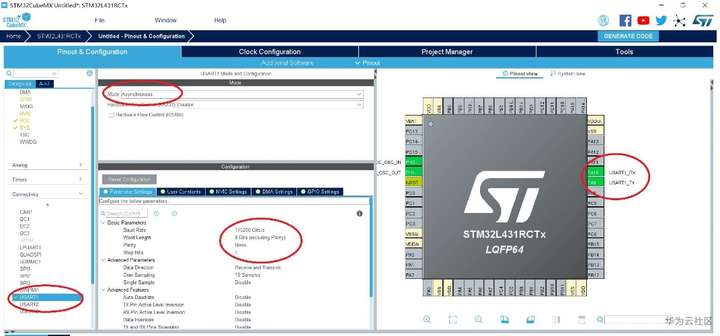
1)配置USART1
使用USART,模式为异步,波特率为115200,无硬件流控制
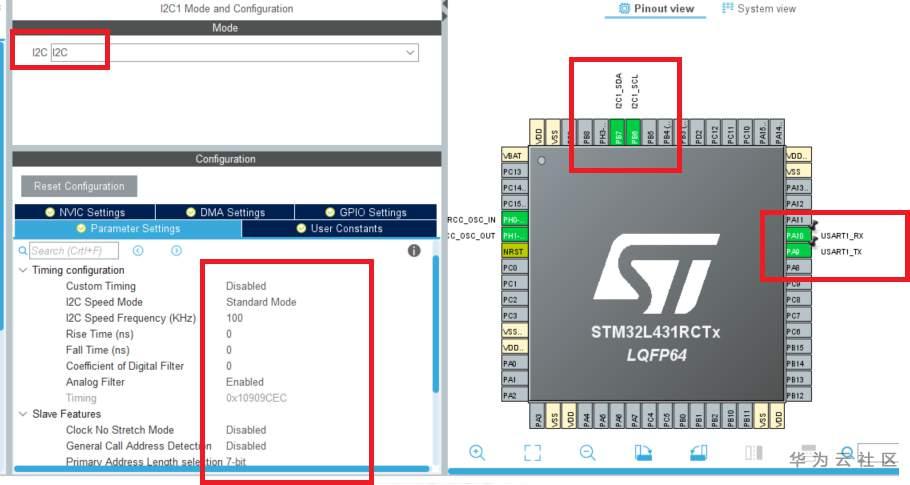
2)硬件IIC配置
IIC(Inter-Integrated Circuit)其实是IICBus简称,所以中文应该叫集成电路总线,它是一种串行通信总线,使用多主从架构
我们使用小熊派的I2C1,小熊派引出的引脚为PB7->I2C1_SDA,PB6->I2C1_SCL
其他选项我们保持默认即可
3)MPU6050模块
当然,我们还需要了解MPU6050模块的电路,更好的进行配置。当然我们也可以自主制作模块
如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位);如果AD0脚接V3.3,则IIC地址为0X69(不包含最低位).
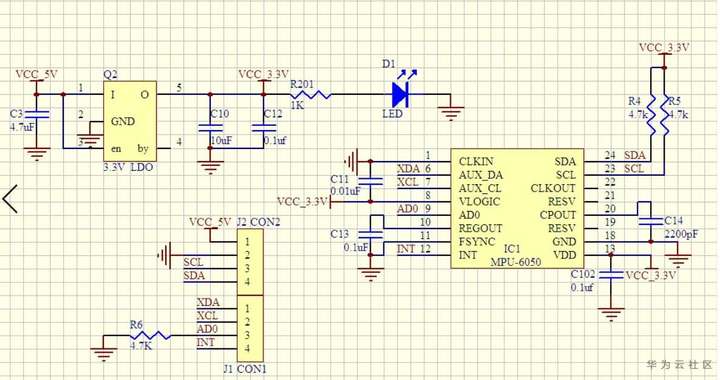
可以看到,AD0引脚已经被拉低,所有默认IIC地址为0x68.
最后,生成代码就OK了
D.工程设置
一些基础的设置,包括工程名、存储位置、工程环境、工程中各个文件的组成

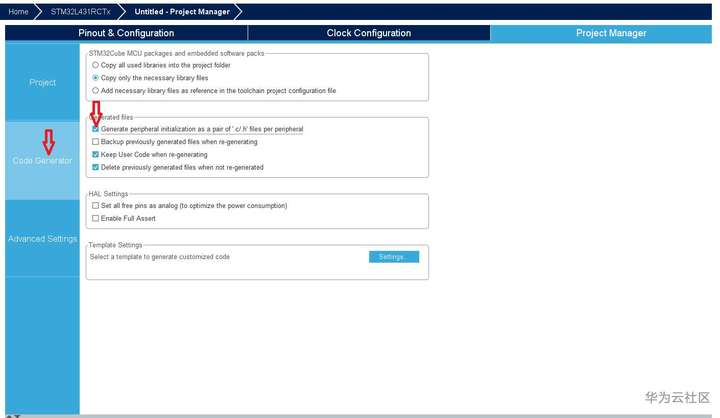
E.生成代码

三、编写相应代码
1. 串口1输出重定向
我们知道printf是打印函数,原理是根据传入的字符串参数格式化打印输出到stdout中。我们需要让printf打印到串口之中,只需要在usart.c文件中模仿printf写一个输出函数即可
- 在添加头文件
/* USER CODE BEGIN 0 */#include <stdarg.h>#include <string.h>#include <stdio.h>/* USER CODE END 0 */
- 写输出函数
/* USER CODE BEGIN 1 */void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...){ unsigned char UsartPrintfBuf[296]; va_list ap; unsigned char *pStr = UsartPrintfBuf; va_start(ap, fmt); vsprintf((char *)UsartPrintfBuf, fmt, ap); //格式化 va_end(ap); while(*pStr != 0) { USART1->TDR = *pStr++; while((USART1->ISR & 0x40) == 0); }}//注意:在usart.h中添加void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...);//使用方法:UsartPrintf(&huart1;,"hello world ");/* USER CODE END 1 */
注意:自己添加的代码,需要在begin和end之间
2.写MPU6050驱动
我们创建两个文件,分别是mpu6050.h和mpu6050.c
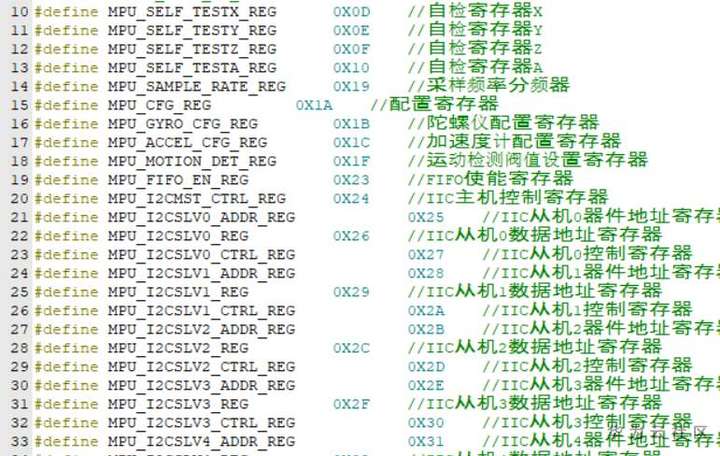
a).首先我们在mpu6050.h中宏定义相应的寄存器,方便后续使用。
在main函数中,我们首先设置计数器初值为10000,然后打开编码器,每1S获取一次计数器的更新值,判断编码器信息
因为寄存器实在太多,就没有一一列出,可以在附件中查看哦~
b).配置各个寄存器
主要的函数为:IIC读写、初始化MPU6050、设置陀螺仪和加速度计满量程、设置采样率、读取数据
代码附件中有,不一一讲解。
初始化函数
uint8_t MPUInit(void){ uint8_t res; extern I2C_HandleTypeDef hi2c1; HAL_I2C_Init(&hi2c1;); //初始化IIC /*上电后最好有一定延时,保证数据准确*/ HAL_Delay(500); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x80); //复位MPU6050,写入1000 0000 MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x00);//sleep写入0,保持唤醒状态 MPU_Set_Gyro_Fsr(3); //陀螺仪满量程±2000 MPU_Set_Accel_Fsr(0); //加速度计满量程±2g MPU_Set_Rate(50); //设置采样率=50Hz MPU_Write_Byte(MPU_INT_EN_REG,0x00);//关闭所有中断 MPU_Write_Byte(MPU_USER_CTRL_REG,0x00); //关闭从iic MPU_Write_Byte(MPU_FIFO_EN_REG,0x00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG,0x80); //INT引脚低电平有效 res = MPU_Read_Byte(MPU_DEVICE_ID_REG); //读取地址 UsartPrintf(&huart1;," MPU6050:0x%2x ",res); UsartPrintf(&huart1;," MPU6050:0x%2x ",MPU_ADDR); if(res == MPU_ADDR) //判断地址是否正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x01); //001,pll,x轴为参考系统时钟源 MPU_Write_Byte(MPU_PWR_MGMT2_REG,0x00); //都不使用待机模式 MPU_Set_Rate(50); }else return 1; return 0;}
需要注意到,mpu6050上电后需要有一定延时,保证数据的稳定。重启mpu6050会有睡眠模式,写入关闭睡眠。最后检测并判断IIC地址是否正确
3.main函数
/* USER CODE BEGIN PV */short x;short y;short z;/* USER CODE END PV */ /* USER CODE BEGIN 2 */ MPUInit(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ while(MPU_Get_Gyroscope(&x,&y,&z) !=0); HAL_Delay(1000); printf(" 陀螺仪:x=-,y=-,z=- ",x,y,z); while(MPU_Get_Accelerometer(&x,&y,&z) != 0); HAL_Delay(1000); printf(" 加速度计:x=-,y=-,z=- ",x,y,z); /* USER CODE BEGIN 3 */ }
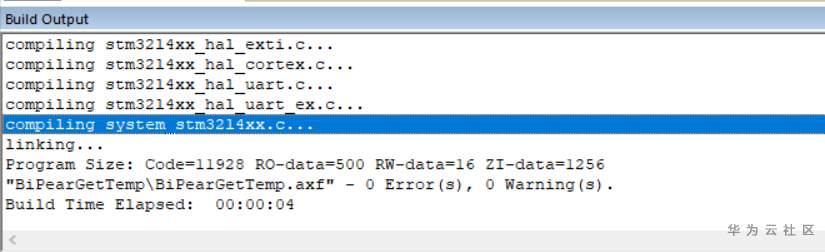
四、编译+下载
点击编译后,0 error,0 warning
小熊派连接在电脑上,代码下载到开发板

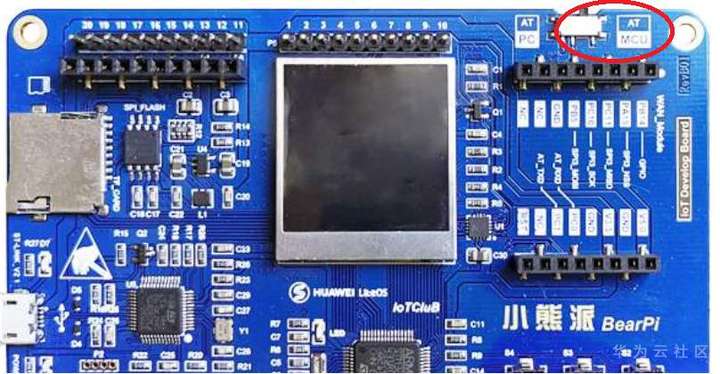
五、连接硬件
1.将小熊派串口1和电脑相连,即拨到 AT-MUC,按下复位键
2.连接MPU6050
我们只需要使用mpu6050的SDASCLGNDVCC。
即:
- SDA-->PB7
- SCL-->PB6
- GND-->GND
- VCC-->5V
3.效果
打开串口调试助手,我们手动转动开发板(包括模块),看见陀螺仪和加速度数据不断变化,当静止时数据保持稳定 。
至此,我们已经可以通过小熊派以IIC获取六轴传感器原始数据信息
本文分享自华为云社区《小熊派实践——获取MPU6050六轴原始数据》,原文作者:ttking 。