摘要:线性规划是一组数学和计算工具,可让您找到该系统的特定解,该解对应于某些其他线性函数的最大值或最小值。
本文分享自华为云社区《实践线性规划:使用 Python 进行优化》,作者: Yuchuan。
线性规划说明
什么是线性规划?
想象一下,您有一个线性方程组和不等式系统。这样的系统通常有许多可能的解决方案。线性规划是一组数学和计算工具,可让您找到该系统的特定解,该解对应于某些其他线性函数的最大值或最小值。
什么是混合整数线性规划?
混合整数线性规划是线性规划的扩展。它处理至少一个变量采用离散整数而不是连续值的问题。尽管乍一看混合整数问题与连续变量问题相似,但它们在灵活性和精度方面具有显着优势。
整数变量对于正确表示自然用整数表示的数量很重要,例如生产的飞机数量或服务的客户数量。
一种特别重要的整数变量是二进制变量。它只能取零或一的值,在做出是或否的决定时很有用,例如是否应该建造工厂或者是否应该打开或关闭机器。您还可以使用它们来模拟逻辑约束。
为什么线性规划很重要?
线性规划是一种基本的优化技术,已在科学和数学密集型领域使用了数十年。它精确、相对快速,适用于一系列实际应用。
混合整数线性规划允许您克服线性规划的许多限制。您可以使用分段线性函数近似非线性函数、使用半连续变量、模型逻辑约束等。它是一种计算密集型工具,但计算机硬件和软件的进步使其每天都更加适用。
通常,当人们试图制定和解决优化问题时,第一个问题是他们是否可以应用线性规划或混合整数线性规划。
以下文章说明了线性规划和混合整数线性规划的一些用例:
- Gurobi 优化案例研究
- 线性规划技术的五个应用领域
随着计算机能力的增强、算法的改进以及更多用户友好的软件解决方案的出现,线性规划,尤其是混合整数线性规划的重要性随着时间的推移而增加。
使用 Python 进行线性规划
解决线性规划问题的基本方法称为单纯形法,它有多种变体。另一种流行的方法是内点法。
混合整数线性规划问题可以通过更复杂且计算量更大的方法来解决,例如分支定界法,它在幕后使用线性规划。这种方法的一些变体是分支和切割方法,它涉及使用切割平面,以及分支和价格方法。
有几种适用于线性规划和混合整数线性规划的合适且众所周知的 Python 工具。其中一些是开源的,而另一些是专有的。您是否需要免费或付费工具取决于问题的规模和复杂性,以及对速度和灵活性的需求。
值得一提的是,几乎所有广泛使用的线性规划和混合整数线性规划库都是以 Fortran 或 C 或 C++ 原生和编写的。这是因为线性规划需要对(通常很大)矩阵进行计算密集型工作。此类库称为求解器。Python 工具只是求解器的包装器。
Python 适合围绕本机库构建包装器,因为它可以很好地与 C/C++ 配合使用。对于本教程,您不需要任何 C/C++(或 Fortran),但如果您想了解有关此酷功能的更多信息,请查看以下资源:
- 构建 Python C 扩展模块
- CPython 内部
- 用 C 或 C++ 扩展 Python
基本上,当您定义和求解模型时,您使用 Python 函数或方法调用低级库,该库执行实际优化工作并将解决方案返回给您的 Python 对象。
几个免费的 Python 库专门用于与线性或混合整数线性规划求解器交互:
- SciPy Optimization and Root Finding
- PuLP
- Pyomo
- CVXOPT
在本教程中,您将使用SciPy和PuLP来定义和解决线性规划问题。
线性规划示例
在本节中,您将看到线性规划问题的两个示例:
- 一个说明什么是线性规划的小问题
- 一个与资源分配相关的实际问题,它说明了现实世界场景中的线性规划概念
您将在下一节中使用 Python 来解决这两个问题。
小型线性规划问题
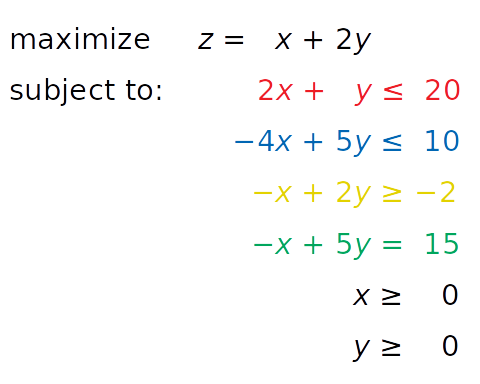
考虑以下线性规划问题:
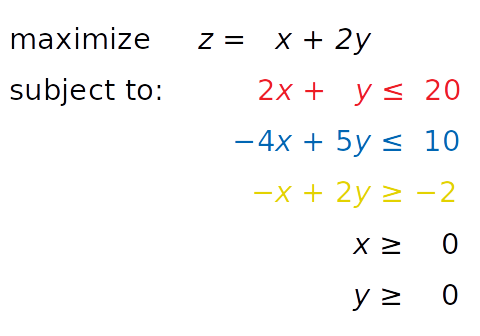
你需要找到X和Ÿ使得红色,蓝色和黄色的不平等,以及不平等X ≥0和ÿ ≥0,是满意的。同时,您的解决方案必须对应于z的最大可能值。
您需要找到的自变量(在本例中为x和y)称为决策变量。要最大化或最小化的决策变量的函数(在本例中为z)称为目标函数、成本函数或仅称为目标。您需要满足的不等式称为不等式约束。您还可以在称为等式约束的约束中使用方程。
这是您如何可视化问题的方法:
红线代表的功能2 X + Ý = 20,和它上面的红色区域示出了红色不等式不满足。同样,蓝线是函数−4 x + 5 y = 10,蓝色区域被禁止,因为它违反了蓝色不等式。黄线是 − x + 2 y = −2,其下方的黄色区域是黄色不等式无效的地方。
如果您忽略红色、蓝色和黄色区域,则仅保留灰色区域。灰色区域的每个点都满足所有约束,是问题的潜在解决方案。该区域称为可行域,其点为可行解。在这种情况下,有无数可行的解决方案。
您想最大化z。对应于最大z的可行解是最优解。如果您尝试最小化目标函数,那么最佳解决方案将对应于其可行的最小值。
请注意,z是线性的。你可以把它想象成一个三维空间中的平面。这就是为什么最优解必须在可行区域的顶点或角上的原因。在这种情况下,最佳解决方案是红线和蓝线相交的点,稍后您将看到。
有时,可行区域的整个边缘,甚至整个区域,都可以对应相同的z值。在这种情况下,您有许多最佳解决方案。
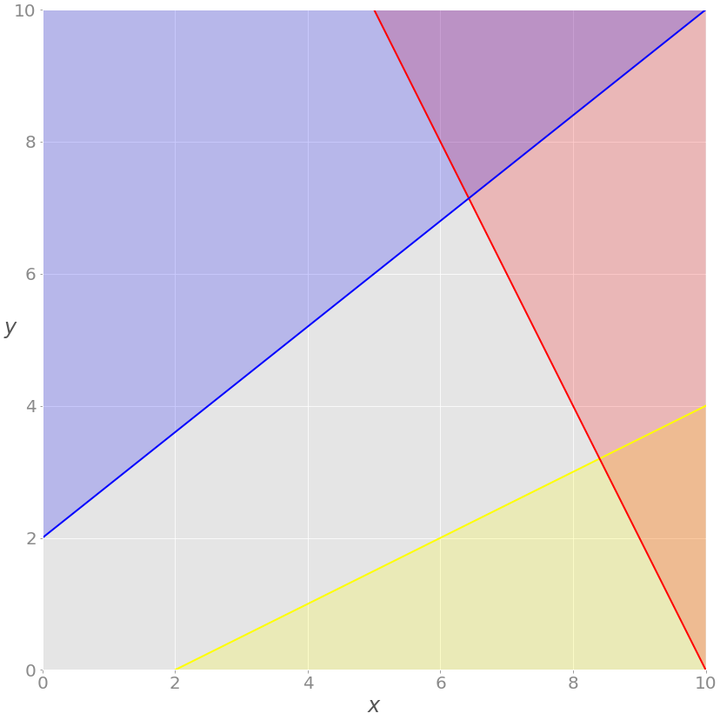
您现在已准备好使用绿色显示的附加等式约束来扩展问题:
方程式 − x + 5 y = 15,以绿色书写,是新的。这是一个等式约束。您可以通过向上一张图像添加相应的绿线来将其可视化:
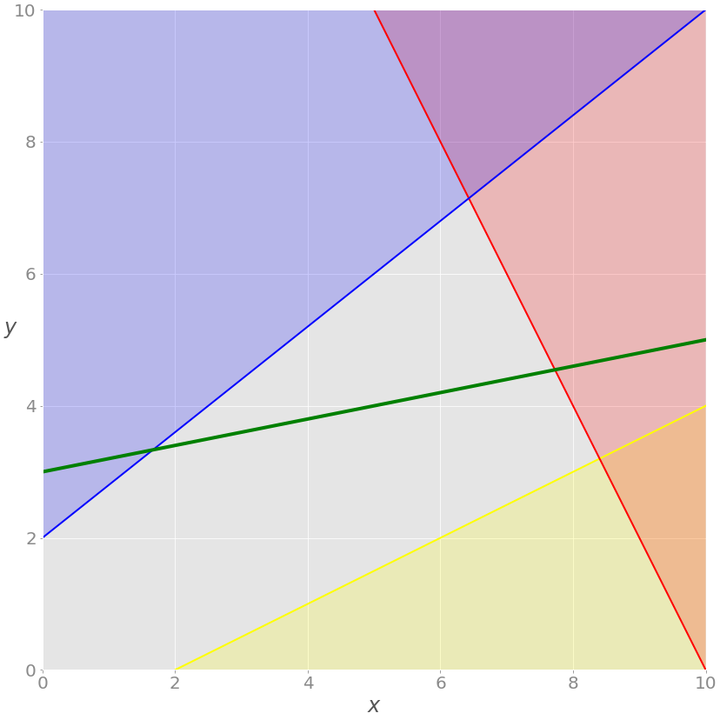
现在的解决方案必须满足绿色等式,因此可行区域不再是整个灰色区域。它是绿线从与蓝线的交点到与红线的交点穿过灰色区域的部分。后一点是解决方案。
如果插入x的所有值都必须是整数的要求,那么就会得到一个混合整数线性规划问题,可行解的集合又会发生变化:
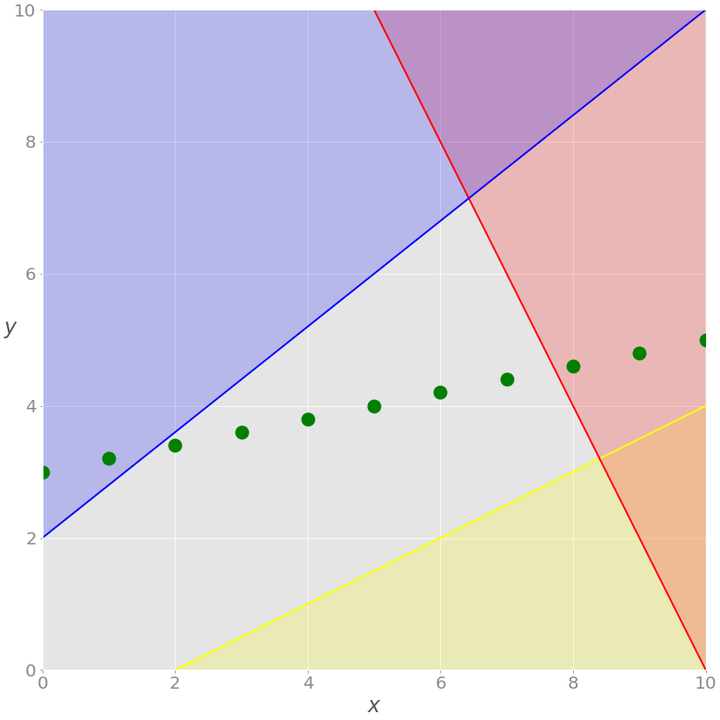
您不再有绿线,只有沿线的x值为整数的点。可行解是灰色背景上的绿点,此时最优解离红线最近。
这三个例子说明了可行的线性规划问题,因为它们具有有界可行区域和有限解。
不可行的线性规划问题
如果没有解,线性规划问题是不可行的。当没有解决方案可以同时满足所有约束时,通常会发生这种情况。
例如,考虑如果添加约束x + y ≤ −1会发生什么。那么至少有一个决策变量(x或y)必须是负数。这与给定的约束x ≥ 0 和y ≥ 0相冲突。这样的系统没有可行的解决方案,因此称为不可行的。
另一个示例是添加与绿线平行的第二个等式约束。这两行没有共同点,因此不会有满足这两个约束的解决方案。
无界线性规划问题
一个线性规划问题是无界的,如果它的可行区域是无界,将溶液不是有限。这意味着您的变量中至少有一个不受约束,可以达到正无穷大或负无穷大,从而使目标也无限大。
例如,假设您采用上面的初始问题并删除红色和黄色约束。从问题中删除约束称为放松问题。在这种情况下,x和y不会在正侧有界。您可以将它们增加到正无穷大,从而产生无限大的z值。
资源分配问题
在前面的部分中,您研究了一个与任何实际应用程序无关的抽象线性规划问题。在本小节中,您将找到与制造业资源分配相关的更具体和实用的优化问题。
假设一家工厂生产四种不同的产品,第一种产品的日产量为x ₁,第二种产品的产量为x 2,依此类推。目标是确定每种产品的利润最大化日产量,同时牢记以下条件:
- 第一种、第二种、第三种和第四种产品的每单位产品利润分别为 20 美元、12 美元、40 美元和 25 美元。
- 由于人力限制,每天生产的总数量不能超过五十台。
- 对于每单位第一个产品,消耗三个单位的原材料 A。每单位第二产品需要两单位原料 A 和一单位原料 B。每单位第三产品需要一单位 A 和两单位 B。最后,每单位第四产品需要三B 的单位
- 由于运输和储存的限制,工厂每天最多可以消耗一百单位的原材料 A 和九十单位的 B。
数学模型可以这样定义:
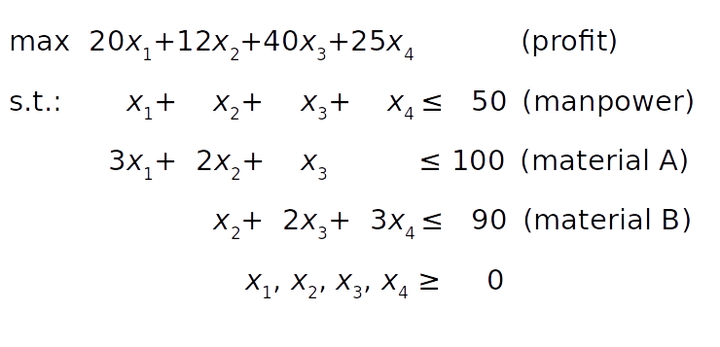
目标函数(利润)在条件 1 中定义。人力约束遵循条件 2。对原材料 A 和 B 的约束可以从条件 3 和条件 4 中通过对每种产品的原材料需求求和得出。
最后,产品数量不能为负,因此所有决策变量必须大于或等于零。
与前面的示例不同,您无法方便地将其可视化,因为它有四个决策变量。但是,无论问题的维度如何,原理都是相同的。
线性规划 Python 实现
在本教程中,您将使用两个Python 包来解决上述线性规划问题:
- SciPy是一个用于使用 Python 进行科学计算的通用包。
- PuLP是一个 Python 线性编程 API,用于定义问题和调用外部求解器。
SciPy 设置起来很简单。安装后,您将拥有开始所需的一切。它的子包scipy.optimize可用于线性和非线性优化。
PuLP 允许您选择求解器并以更自然的方式表述问题。PuLP 使用的默认求解器是COIN-OR Branch and Cut Solver (CBC)。它连接到用于线性松弛的COIN-OR 线性规划求解器 (CLP)和用于切割生成的COIN-OR 切割生成器库 (CGL)。
另一个伟大的开源求解器是GNU 线性规划工具包 (GLPK)。一些著名且非常强大的商业和专有解决方案是Gurobi、CPLEX和XPRESS。
除了在定义问题时提供灵活性和运行各种求解器的能力外,PuLP 使用起来不如 Pyomo 或 CVXOPT 等替代方案复杂,后者需要更多的时间和精力来掌握。
安装 SciPy 和 PuLP
要学习本教程,您需要安装 SciPy 和 PuLP。下面的示例使用 SciPy 1.4.1 版和 PuLP 2.1 版。
您可以使用pip以下方法安装两者:
$ python -m pip install -U "scipy==1.4.*" "pulp==2.1"
您可能需要运行pulptest或sudo pulptest启用 PuLP 的默认求解器,尤其是在您使用 Linux 或 Mac 时:
$ pulptest
或者,您可以下载、安装和使用 GLPK。它是免费和开源的,适用于 Windows、MacOS 和 Linux。在本教程的后面部分,您将看到如何将 GLPK(除了 CBC)与 PuLP 一起使用。
在 Windows 上,您可以下载档案并运行安装文件。
在 MacOS 上,您可以使用 Homebrew:
$ brew install glpk
在 Debian 和 Ubuntu 上,使用apt来安装glpk和glpk-utils:
$ sudo apt install glpk glpk-utils
在Fedora,使用dnf具有glpk-utils:
$ sudo dnf install glpk-utils
您可能还会发现conda对安装 GLPK 很有用:
$ conda install -c conda-forge glpk
安装完成后,可以查看GLPK的版本:
$ glpsol --version
有关详细信息,请参阅 GLPK 关于使用Windows 可执行文件和Linux 软件包进行安装的教程。
使用 SciPy
在本节中,您将学习如何使用 SciPy优化和求根库进行线性规划。
要使用 SciPy 定义和解决优化问题,您需要导入scipy.optimize.linprog():
>>>
>>> from scipy.optimize import linprog
现在您已经linprog()导入,您可以开始优化。
示例 1
让我们首先解决上面的线性规划问题:
linprog()仅解决最小化(而非最大化)问题,并且不允许具有大于或等于符号 (≥) 的不等式约束。要解决这些问题,您需要在开始优化之前修改您的问题:
- 不是最大化z = x + 2 y,你可以最小化它的负值(− z = − x − 2 y)。
- 代替大于或等于符号,您可以将黄色不等式乘以 -1 并得到小于或等于符号 (≤) 的相反数。
引入这些更改后,您将获得一个新系统:
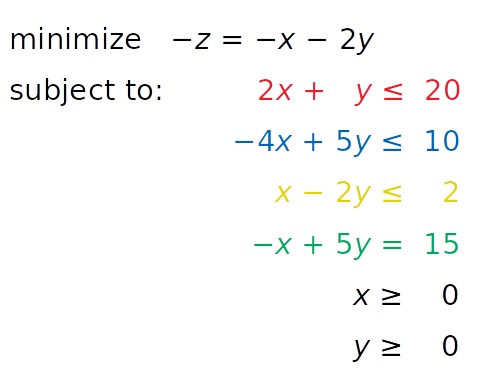
该系统与原始系统等效,并且将具有相同的解决方案。应用这些更改的唯一原因是克服 SciPy 与问题表述相关的局限性。
下一步是定义输入值:
>>> >>> obj = [-1, -2] >>> # ─┬ ─┬ >>> # │ └┤ Coefficient for y >>> # └────┤ Coefficient for x >>> lhs_ineq = [[ 2, 1], # Red constraint left side ... [-4, 5], # Blue constraint left side ... [ 1, -2]] # Yellow constraint left side >>> rhs_ineq = [20, # Red constraint right side ... 10, # Blue constraint right side ... 2] # Yellow constraint right side >>> lhs_eq = [[-1, 5]] # Green constraint left side >>> rhs_eq = [15] # Green constraint right side
您将上述系统中的值放入适当的列表、元组或NumPy 数组中:
- obj 保存目标函数的系数。
- lhs_ineq 保存不等式(红色、蓝色和黄色)约束的左侧系数。
- rhs_ineq 保存不等式(红色、蓝色和黄色)约束的右侧系数。
- lhs_eq 保存来自等式(绿色)约束的左侧系数。
- rhs_eq 保存来自等式(绿色)约束的右侧系数。
注意:请注意行和列的顺序!
约束左侧和右侧的行顺序必须相同。每一行代表一个约束。
来自目标函数和约束左侧的系数的顺序必须匹配。每列对应一个决策变量。
下一步是以与系数相同的顺序定义每个变量的界限。在这种情况下,它们都在零和正无穷大之间:
>>> >>> bnd = [(0, float("inf")), # Bounds of x ... (0, float("inf"))] # Bounds of y
此语句是多余的,因为linprog()默认情况下采用这些边界(零到正无穷大)。
注:相反的float("inf"),你可以使用math.inf,numpy.inf或scipy.inf。
最后,是时候优化和解决您感兴趣的问题了。你可以这样做linprog():
>>> >>> opt = linprog(c=obj, A_ub=lhs_ineq, b_ub=rhs_ineq, ... A_eq=lhs_eq, b_eq=rhs_eq, bounds=bnd, ... method="revised simplex") >>> opt con: array([0.]) fun: -16.818181818181817 message: 'Optimization terminated successfully.' nit: 3 slack: array([ 0. , 18.18181818, 3.36363636]) status: 0 success: True x: array([7.72727273, 4.54545455])
参数c是指来自目标函数的系数。A_ub和b_ub分别与不等式约束左边和右边的系数有关。同样,A_eq并b_eq参考等式约束。您可以使用bounds提供决策变量的下限和上限。
您可以使用该参数method来定义要使用的线性规划方法。有以下三种选择:
- method="interior-point"选择内点法。默认情况下设置此选项。
- method="revised simplex" 选择修正的两相单纯形法。
- method="simplex" 选择传统的两相单纯形方法。
linprog() 返回具有以下属性的数据结构:
- .con 是等式约束残差。
- .fun 是最优的目标函数值(如果找到)。
- .message 是解决方案的状态。
- .nit 是完成计算所需的迭代次数。
- .slack 是松弛变量的值,或约束左右两侧的值之间的差异。
- .status是一个介于0和之间的整数4,表示解决方案的状态,例如0找到最佳解决方案的时间。
- .success是一个布尔值,显示是否已找到最佳解决方案。
- .x 是一个保存决策变量最优值的 NumPy 数组。
您可以分别访问这些值:
>>> >>> opt.fun -16.818181818181817 >>> opt.success True >>> opt.x array([7.72727273, 4.54545455])
这就是您获得优化结果的方式。您还可以以图形方式显示它们:
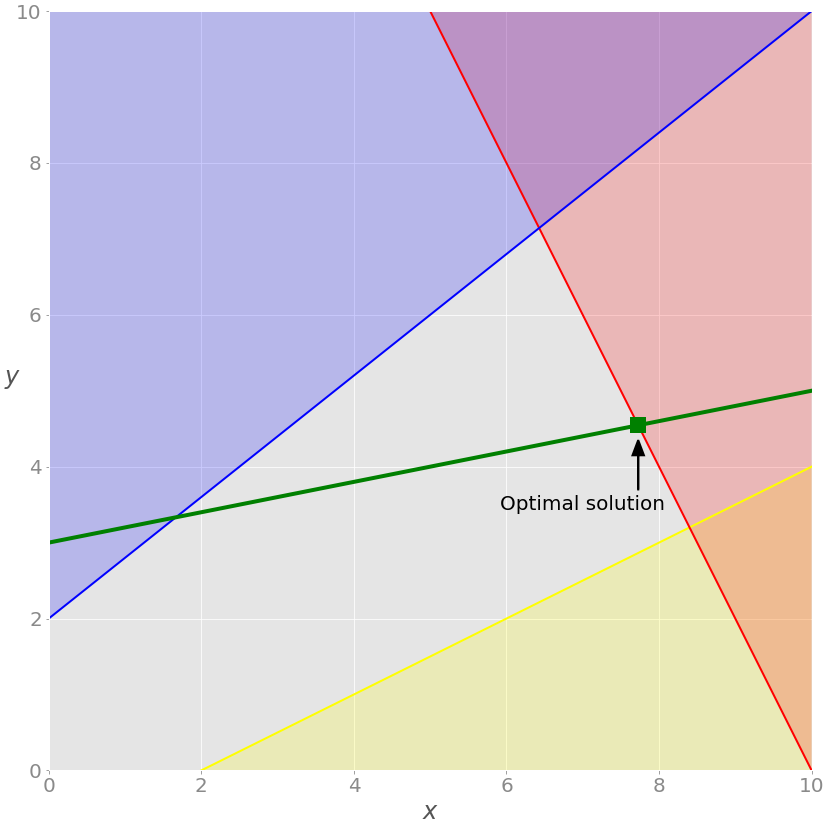
如前所述,线性规划问题的最优解位于可行区域的顶点。在这种情况下,可行区域只是蓝线和红线之间的绿线部分。最优解是代表绿线和红线交点的绿色方块。
如果要排除相等(绿色)约束,只需删除参数A_eq并b_eq从linprog()调用中删除:
>>> >>> opt = linprog(c=obj, A_ub=lhs_ineq, b_ub=rhs_ineq, bounds=bnd, ... method="revised simplex") >>> opt con: array([], dtype=float64) fun: -20.714285714285715 message: 'Optimization terminated successfully.' nit: 2 slack: array([0. , 0. , 9.85714286]) status: 0 success: True x: array([6.42857143, 7.14285714]))
解决方案与前一种情况不同。你可以在图表上看到:
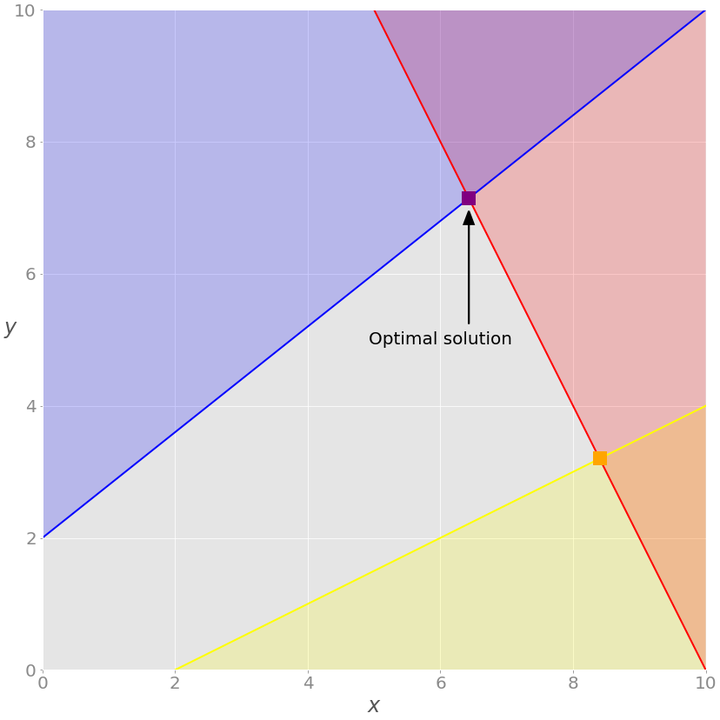
在这个例子中,最优解是红色和蓝色约束相交的可行(灰色)区域的紫色顶点。其他顶点,如黄色顶点,具有更高的目标函数值。
示例 2
您可以使用 SciPy 来解决前面部分所述的资源分配问题:
和前面的例子一样,你需要从上面的问题中提取必要的向量和矩阵,将它们作为参数传递给.linprog(),然后得到结果:
>>> >>> obj = [-20, -12, -40, -25] >>> lhs_ineq = [[1, 1, 1, 1], # Manpower ... [3, 2, 1, 0], # Material A ... [0, 1, 2, 3]] # Material B >>> rhs_ineq = [ 50, # Manpower ... 100, # Material A ... 90] # Material B >>> opt = linprog(c=obj, A_ub=lhs_ineq, b_ub=rhs_ineq, ... method="revised simplex") >>> opt con: array([], dtype=float64) fun: -1900.0 message: 'Optimization terminated successfully.' nit: 2 slack: array([ 0., 40., 0.]) status: 0 success: True x: array([ 5., 0., 45., 0.])
结果告诉您最大利润是1900并且对应于x ₁ = 5 和x ₃ = 45。在给定条件下生产第二和第四个产品是没有利润的。您可以在这里得出几个有趣的结论:
- 第三个产品带来的单位利润最大,因此工厂将生产最多。
- 第一个slack是0,表示人力(第一)约束左右两边的值是一样的。工厂每天50生产单位,这是它的全部产能。
- 第二个松弛是40因为工厂消耗了 60 单位的原材料 A(第一种产品为 15 单位,第三种产品为 45100单位)。
- 第三个裕量是0,这意味着工厂消耗了所有90单位的原材料 B。这全部量都用于第三个产品。这就是为什么工厂根本不能生产第二或第四种产品,也不能生产超过45单位的第三种产品。缺乏原材料 B.
opt.statusis0和opt.successis True,说明优化问题成功求解,最优可行解。
SciPy 的线性规划功能主要用于较小的问题。对于更大和更复杂的问题,您可能会发现其他库更适合,原因如下:
- SciPy 无法运行各种外部求解器。
- SciPy 不能使用整数决策变量。
- SciPy 不提供促进模型构建的类或函数。您必须定义数组和矩阵,这对于大型问题来说可能是一项乏味且容易出错的任务。
- SciPy 不允许您直接定义最大化问题。您必须将它们转换为最小化问题。
- SciPy 不允许您直接使用大于或等于符号来定义约束。您必须改用小于或等于。
幸运的是,Python 生态系统为线性编程提供了几种替代解决方案,这些解决方案对于更大的问题非常有用。其中之一是 PuLP,您将在下一节中看到它的实际应用。
Using PuLP
PuLP 具有比 SciPy 更方便的线性编程 API。您不必在数学上修改您的问题或使用向量和矩阵。一切都更干净,更不容易出错。
像往常一样,您首先导入您需要的内容:
from pulp import LpMaximize, LpProblem, LpStatus, lpSum, LpVariable
现在您已经导入了 PuLP,您可以解决您的问题。
示例 1
您现在将使用 PuLP 解决此系统:
第一步是初始化一个实例LpProblem来表示你的模型:
# Create the model model = LpProblem(name="small-problem", sense=LpMaximize)
您可以使用该sense参数来选择是执行最小化(LpMinimize或1,这是默认值)还是最大化(LpMaximize或-1)。这个选择会影响你的问题的结果。
一旦有了模型,就可以将决策变量定义为LpVariable类的实例:
# Initialize the decision variables x = LpVariable(name="x", lowBound=0) y = LpVariable(name="y", lowBound=0)
您需要提供下限,lowBound=0因为默认值为负无穷大。该参数upBound定义了上限,但您可以在此处省略它,因为它默认为正无穷大。
可选参数cat定义决策变量的类别。如果您使用的是连续变量,则可以使用默认值"Continuous"。
您可以使用变量x和y创建表示线性表达式和约束的其他 PuLP 对象:
>>> >>> expression = 2 * x + 4 * y >>> type(expression) <class 'pulp.pulp.LpAffineExpression'> >>> constraint = 2 * x + 4 * y >= 8 >>> type(constraint) <class 'pulp.pulp.LpConstraint'>
当您将决策变量与标量相乘或构建多个决策变量的线性组合时,您会得到一个pulp.LpAffineExpression代表线性表达式的实例。
注意:您可以增加或减少变量或表达式,你可以乘他们常数,因为纸浆类实现一些Python的特殊方法,即模拟数字类型一样__add__(),__sub__()和__mul__()。这些方法用于像定制运营商的行为+,-和*。
类似地,您可以将线性表达式、变量和标量与运算符 ==、<=、 或>=以获取表示模型线性约束的纸浆.LpConstraint实例。
注:也有可能与丰富的比较方法来构建的约束.__eq__(),.__le__()以及.__ge__()定义了运营商的行为==,<=和>=。
考虑到这一点,下一步是创建约束和目标函数并将它们分配给您的模型。您不需要创建列表或矩阵。只需编写 Python 表达式并使用+=运算符将它们附加到模型中:
# Add the constraints to the model model += (2 * x + y <= 20, "red_constraint") model += (4 * x - 5 * y >= -10, "blue_constraint") model += (-x + 2 * y >= -2, "yellow_constraint") model += (-x + 5 * y == 15, "green_constraint")
在上面的代码中,您定义了包含约束及其名称的元组。LpProblem允许您通过将约束指定为元组来向模型添加约束。第一个元素是一个LpConstraint实例。第二个元素是该约束的可读名称。
设置目标函数非常相似:
# Add the objective function to the model obj_func = x + 2 * y model += obj_func
或者,您可以使用更短的符号:
# Add the objective function to the model model += x + 2 * y
现在您已经添加了目标函数并定义了模型。
注意:您可以使用运算符将约束或目标附加到模型中,+=因为它的类LpProblem实现了特殊方法.__iadd__(),该方法用于指定 的行为+=。
对于较大的问题,lpSum()与列表或其他序列一起使用通常比重复+运算符更方便。例如,您可以使用以下语句将目标函数添加到模型中:
# Add the objective function to the model model += lpSum([x, 2 * y])
它产生与前一条语句相同的结果。
您现在可以看到此模型的完整定义:
>>> >>> model small-problem: MAXIMIZE 1*x + 2*y + 0 SUBJECT TO red_constraint: 2 x + y <= 20 blue_constraint: 4 x - 5 y >= -10 yellow_constraint: - x + 2 y >= -2 green_constraint: - x + 5 y = 15 VARIABLES x Continuous y Continuous
模型的字符串表示包含所有相关数据:变量、约束、目标及其名称。
注意:字符串表示是通过定义特殊方法构建的.__repr__()。有关 的更多详细信息.__repr__(),请查看Pythonic OOP 字符串转换:__repr__vs__str__ .
最后,您已准备好解决问题。你可以通过调用.solve()你的模型对象来做到这一点。如果要使用默认求解器 (CBC),则不需要传递任何参数:
# Solve the problem
status = model.solve()
.solve()调用底层求解器,修改model对象,并返回解决方案的整数状态,1如果找到了最优解。有关其余状态代码,请参阅LpStatus[]。
你可以得到优化结果作为 的属性model。该函数value()和相应的方法.value()返回属性的实际值:
>>> >>> print(f"status: {model.status}, {LpStatus[model.status]}") status: 1, Optimal >>> print(f"objective: {model.objective.value()}") objective: 16.8181817 >>> for var in model.variables(): ... print(f"{var.name}: {var.value()}") ... x: 7.7272727 y: 4.5454545 >>> for name, constraint in model.constraints.items(): ... print(f"{name}: {constraint.value()}") ... red_constraint: -9.99999993922529e-08 blue_constraint: 18.181818300000003 yellow_constraint: 3.3636362999999996 green_constraint: -2.0000000233721948e-07)
model.objective持有目标函数model.constraints的值,包含松弛变量的值,以及对象x和y具有决策变量的最优值。model.variables()返回一个包含决策变量的列表:
>>> >>> model.variables() [x, y] >>> model.variables()[0] is x True >>> model.variables()[1] is y True
如您所见,此列表包含使用 的构造函数创建的确切对象LpVariable。
结果与您使用 SciPy 获得的结果大致相同。
注意:注意这个方法.solve()——它会改变对象的状态,x并且y!
您可以通过调用查看使用了哪个求解器.solver:
>>> >>> model.solver <pulp.apis.coin_api.PULP_CBC_CMD object at 0x7f60aea19e50>
输出通知您求解器是 CBC。您没有指定求解器,因此 PuLP 调用了默认求解器。
如果要运行不同的求解器,则可以将其指定为 的参数.solve()。例如,如果您想使用 GLPK 并且已经安装了它,那么您可以solver=GLPK(msg=False)在最后一行使用。请记住,您还需要导入它:
from pulp import GLPK
现在你已经导入了 GLPK,你可以在里面使用它.solve():
# Create the model model = LpProblem(name="small-problem", sense=LpMaximize) # Initialize the decision variables x = LpVariable(name="x", lowBound=0) y = LpVariable(name="y", lowBound=0) # Add the constraints to the model model += (2 * x + y <= 20, "red_constraint") model += (4 * x - 5 * y >= -10, "blue_constraint") model += (-x + 2 * y >= -2, "yellow_constraint") model += (-x + 5 * y == 15, "green_constraint") # Add the objective function to the model model += lpSum([x, 2 * y]) # Solve the problem status = model.solve(solver=GLPK(msg=False))
该msg参数用于显示来自求解器的信息。msg=False禁用显示此信息。如果要包含信息,则只需省略msg或设置msg=True。
您的模型已定义并求解,因此您可以按照与前一种情况相同的方式检查结果:
>>> >>> print(f"status: {model.status}, {LpStatus[model.status]}") status: 1, Optimal >>> print(f"objective: {model.objective.value()}") objective: 16.81817 >>> for var in model.variables(): ... print(f"{var.name}: {var.value()}") ... x: 7.72727 y: 4.54545 >>> for name, constraint in model.constraints.items(): ... print(f"{name}: {constraint.value()}") ... red_constraint: -1.0000000000509601e-05 blue_constraint: 18.181830000000005 yellow_constraint: 3.3636299999999997 green_constraint: -2.000000000279556e-05
使用 GLPK 得到的结果与使用 SciPy 和 CBC 得到的结果几乎相同。
一起来看看这次用的是哪个求解器:
>>> >>> model.solver <pulp.apis.glpk_api.GLPK_CMD object at 0x7f60aeb04d50>
正如您在上面用突出显示的语句定义的那样model.solve(solver=GLPK(msg=False)),求解器是 GLPK。
您还可以使用 PuLP 来解决混合整数线性规划问题。要定义整数或二进制变量,只需传递cat="Integer"或cat="Binary"到LpVariable。其他一切都保持不变:
# Create the model model = LpProblem(name="small-problem", sense=LpMaximize) # Initialize the decision variables: x is integer, y is continuous x = LpVariable(name="x", lowBound=0, cat="Integer") y = LpVariable(name="y", lowBound=0) # Add the constraints to the model model += (2 * x + y <= 20, "red_constraint") model += (4 * x - 5 * y >= -10, "blue_constraint") model += (-x + 2 * y >= -2, "yellow_constraint") model += (-x + 5 * y == 15, "green_constraint") # Add the objective function to the model model += lpSum([x, 2 * y]) # Solve the problem status = model.solve()
在本例中,您有一个整数变量并获得与之前不同的结果:
>>> >>> print(f"status: {model.status}, {LpStatus[model.status]}") status: 1, Optimal >>> print(f"objective: {model.objective.value()}") objective: 15.8 >>> for var in model.variables(): ... print(f"{var.name}: {var.value()}") ... x: 7.0 y: 4.4 >>> for name, constraint in model.constraints.items(): ... print(f"{name}: {constraint.value()}") ... red_constraint: -1.5999999999999996 blue_constraint: 16.0 yellow_constraint: 3.8000000000000007 green_constraint: 0.0) >>> model.solver <pulp.apis.coin_api.PULP_CBC_CMD at 0x7f0f005c6210>
Nowx是一个整数,如模型中所指定。(从技术上讲,它保存一个小数点后为零的浮点值。)这一事实改变了整个解决方案。让我们在图表上展示这一点:
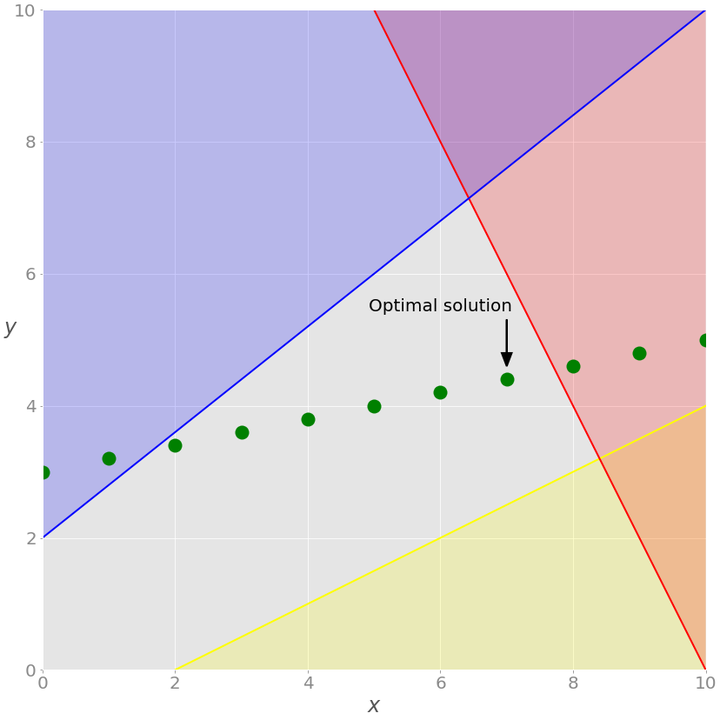
如您所见,最佳解决方案是灰色背景上最右边的绿点。这是两者的最大价值的可行的解决方案x和y,给它的最大目标函数值。
GLPK 也能够解决此类问题。
示例 2
现在你可以使用 PuLP 来解决上面的资源分配问题:
定义和解决问题的方法与前面的示例相同:
# Define the model model = LpProblem(name="resource-allocation", sense=LpMaximize) # Define the decision variables x = {i: LpVariable(name=f"x{i}", lowBound=0) for i in range(1, 5)} # Add constraints model += (lpSum(x.values()) <= 50, "manpower") model += (3 * x[1] + 2 * x[2] + x[3] <= 100, "material_a") model += (x[2] + 2 * x[3] + 3 * x[4] <= 90, "material_b") # Set the objective model += 20 * x[1] + 12 * x[2] + 40 * x[3] + 25 * x[4] # Solve the optimization problem status = model.solve() # Get the results print(f"status: {model.status}, {LpStatus[model.status]}") print(f"objective: {model.objective.value()}") for var in x.values(): print(f"{var.name}: {var.value()}") for name, constraint in model.constraints.items(): print(f"{name}: {constraint.value()}")
在这种情况下,您使用字典 x来存储所有决策变量。这种方法很方便,因为字典可以将决策变量的名称或索引存储为键,将相应的LpVariable对象存储为值。列表或元组的LpVariable实例可以是有用的。
上面的代码产生以下结果:
status: 1, Optimal objective: 1900.0 x1: 5.0 x2: 0.0 x3: 45.0 x4: 0.0 manpower: 0.0 material_a: -40.0 material_b: 0.0
如您所见,该解决方案与使用 SciPy 获得的解决方案一致。最有利可图的解决方案是每天生产5.0第一件产品和45.0第三件产品。
让我们把这个问题变得更复杂和有趣。假设由于机器问题,工厂无法同时生产第一种和第三种产品。在这种情况下,最有利可图的解决方案是什么?
现在您有另一个逻辑约束:如果x ₁ 为正数,则x ₃ 必须为零,反之亦然。这是二元决策变量非常有用的地方。您将使用两个二元决策变量y ₁ 和y ₃,它们将表示是否生成了第一个或第三个产品:
1model = LpProblem(name="resource-allocation", sense=LpMaximize) 2 3# Define the decision variables 4x = {i: LpVariable(name=f"x{i}", lowBound=0) for i in range(1, 5)} 5y = {i: LpVariable(name=f"y{i}", cat="Binary") for i in (1, 3)} 6 7# Add constraints 8model += (lpSum(x.values()) <= 50, "manpower") 9model += (3 * x[1] + 2 * x[2] + x[3] <= 100, "material_a") 10model += (x[2] + 2 * x[3] + 3 * x[4] <= 90, "material_b") 11 12M = 100 13model += (x[1] <= y[1] * M, "x1_constraint") 14model += (x[3] <= y[3] * M, "x3_constraint") 15model += (y[1] + y[3] <= 1, "y_constraint") 16 17# Set objective 18model += 20 * x[1] + 12 * x[2] + 40 * x[3] + 25 * x[4] 19 20# Solve the optimization problem 21status = model.solve() 22 23print(f"status: {model.status}, {LpStatus[model.status]}") 24print(f"objective: {model.objective.value()}") 25 26for var in model.variables(): 27 print(f"{var.name}: {var.value()}") 28 29for name, constraint in model.constraints.items(): 30 print(f"{name}: {constraint.value()}")
除了突出显示的行之外,代码与前面的示例非常相似。以下是差异:
- 第 5 行定义了二元决策变量y[1]并y[3]保存在字典中y。
- 第 12 行定义了一个任意大的数M。100在这种情况下,该值足够大,因为您100每天的数量不能超过单位。
- 第 13 行说如果y[1]为零,则x[1]必须为零,否则它可以是任何非负数。
- 第 14 行说如果y[3]为零,则x[3]必须为零,否则它可以是任何非负数。
- 第 15 行说要么y[1]ory[3]为零(或两者都是),所以要么x[1]or 也x[3]必须为零。
这是解决方案:
status: 1, Optimal objective: 1800.0 x1: 0.0 x2: 0.0 x3: 45.0 x4: 0.0 y1: 0.0 y3: 1.0 manpower: -5.0 material_a: -55.0 material_b: 0.0 x1_constraint: 0.0 x3_constraint: -55.0 y_constraint: 0.0
事实证明,最佳方法是排除第一种产品而只生产第三种产品。
线性规划求解器
就像有许多资源可以帮助您学习线性规划和混合整数线性规划一样,还有许多具有 Python 包装器的求解器可用。这是部分列表:
- GLPK
- LP Solve
- CLP
- CBC
- CVXOPT
- SciPy
- SCIP with PySCIPOpt
- Gurobi Optimizer
- CPLEX
- XPRESS
- MOSEK
其中一些库,如 Gurobi,包括他们自己的 Python 包装器。其他人使用外部包装器。例如,您看到可以使用 PuLP 访问 CBC 和 GLPK。
结论
您现在知道什么是线性规划以及如何使用 Python 解决线性规划问题。您还了解到 Python 线性编程库只是本机求解器的包装器。当求解器完成其工作时,包装器返回解决方案状态、决策变量值、松弛变量、目标函数等。