++++++++++++++++++++++++++++++++++++++++++
本文系本站原创,欢迎转载! 转载请注明出处:
http://blog.csdn.net/mr_raptor/article/details/6556172
++++++++++++++++++++++++++++++++++++++++++
1.1.1 ARM处理器模式切换(含MRS,MSR指令)
除了用户模式和系统模式,其余模式下都有一个私有SPSR保存状态寄存器,用来保存切换到该模式之前的执行状态,之所以用户模式和系统模式没有SPSR是因为,通常CPU大部分时间执行在用户模式下,当产生异常或系统调用时会分别切换进入另外几种模式,保存用户模式下的状态,当切换回原先模式时,直接回复SPSR的值到CPSR就可以了,因此,用户模式和系统模式下不需要SPSR,其详细操作查看下节异常处理。
以上几种模式通过CPSR里的M[4:0]位进行区分,如图3-1所示:
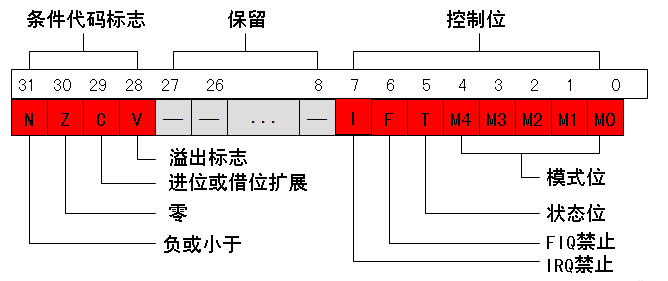
图3-1 CPSR控制位
通过向模式位M[4:0]里写入相应的数据切换到不同的模式,在对CPSR,SPSR寄存器进行操作不能使用mov,ldr等通用指令,只能使用特权指令msr和mrs。
在ARM处理器中,只有MRS(Move to Register from State register)指令可以对状态寄存器CPSR和SPSR进行读操作。通过读CPSR可以获得当前处理器的工作状态。读SPSR寄存器可以获得进入异常前的处理器状态(因为只有异常模式下有SPSR寄存器)。
例如:
MRS R1,CPSR ; 将CPSR状态寄存器读取,保存到R1中
MRS R2,SPSR ; 将SPSR状态寄存器读取,保存到R2中
通过MRS指令可以取得状态寄存器里的值,然后比较其模式位M[4:0]的值判断当前所处模式,当然也可以比较其它相应位了解当前CPU的状态。
同样,在ARM处理器中,只有MSR指令可以对状态寄存器CPSR和SPSR进行写操作。与MRS配合使用,可以实现对CPSR或SPSR寄存器的读-修改-写操作,可以切换处理器模式、或者允许/禁止IRQ/FIQ中断等。
由于xPSR寄存器代表了CPU的状态,其每个位有特殊意义,在执行对xPSR状态寄存器写入时(读取时不存在该用法),为了防止误操作和方便记忆,将xPSR里32位分成四个区域,每个区域用小写字母表示:
c 控制域屏蔽 psr[7..0]
x 扩展域屏蔽 psr[15..8]
s 状态域屏蔽 psr[23..16]
f 标志域屏蔽 psr[31..24]
注意:区域名必须为小写字母
向对应区域进行执行写入时,使用xPSR_x可以指定写入区域,而不影响状态寄存器其它位,如:
使能IRQ中断:
ENABLE_IRQ
MRS R0, CPSR ; 将CPSR寄存器内容读出到R0
BIC R0, R0,#0x80 ; 清掉CPSR中的I控制位
MSR CPSR_c,R0 ; 将修改后的值写回 CPSR寄存器的对应控制域
MOV PC,LR ; 返回上一层函数
禁用IRQ中断:
DISABLE_IRQ
MRS R0 CPSR ; 将CPSR寄存器内容读出到R0
ORR R0, R0,#0x80 ; 设置CPSR中的I控制位
MSR CPSR_c,R0 ; 将修改后的值写回 CPSR寄存器的对应控制域
MOV PC,LR ; 返回上一层函数
下表列出了不同模式的二进制数表示:
表3-3 不同工作模式对应二进制
|
模式名 |
用户 |
快中断 |
中断 |
管理 |
中止 |
未定义 |
系统 |
|
M[4:0] |
10000 |
10001 |
10010 |
10011 |
10111 |
11011 |
11111 |
在对开发板进行初始化时,用对不同模式指定其栈空间,下面例子对各模式的栈指针sp进行初始化:
stack_init ; 栈指针初始化函数
@ undefine_stack
msr cpsr_c, #0xdb ; 切换到未定义异常
ldr sp, =0x34000000 ; 栈指针为内存最高地址,栈为倒生的栈
; 栈空间的最后1M 0x34000000~0x33f00000
@ abort_stack
msr cpsr_c, #0xd7 ; 切换到终止异常模式
ldr sp, =0x33f00000 ; 栈空间为1M,0x33f00000~0x33e00000
@ irq_stack
msr cpsr_c, #0xd2 ; 切换到中断模式
ldr sp, =0x33e00000 ; 栈空间为1M,0x33e00000~0x33d00000
@ sys_stack
msr cpsr_c, #0xdf ; 切换到系统模式
ldr sp, =0x33d00000 ; 栈空间为1M,0x33d00000~0x33c00000
msr cpsr_c, #0xd3 ; 切换回管理模式
mov pc, lr
++++++++++++++++++++++++++++++++++++++++++
本文系本站原创,欢迎转载! 转载请注明出处: