ConcurrentHashMap源码走读
简介
在从JDK8开始,为了提高并发度,ConcurrentHashMap的源码进行了很大的调整。在JDK7中,采用的是分段锁的思路。简单的说,就是ConcurrentHashMap是由多个HashMap构成。当需要进行写入操作的时候,会寻找到对应的HashMap,使用synchronized对对应的hashmap加锁,然后执行写入操作。显然,并发程度就取决于HashMap个数的多少。而在JDK8中换了一种完全不同的思路。
首先,仍然是使用Entry[]作为数据的基本存储。但是锁的粒度被缩小到了数组中的每一个槽位上,数据读取的可见性依靠volatile来保证。而在尝试写入的时候,会将对应的槽位上的元素作为加锁对象,使用synchronized进行加锁,来保证并发写入的安全性。
除此之外,如果多个Key的hashcode在取模后落在了相同的槽位上,在一定数量内(默认是8),采用链表的方式连接节点;超过之后,为了提高查询效率,会将槽位上的节点转为使用红黑树结构进行存储。
还有一个比较大的改变在于当进行扩容的时候,除了扩容线程本身,如果其他线程识别到了扩容进行中,则会尝试协助扩容。
下面来看下来针对几个重点方法进行源码分析。
放入数据
添加数据的方法为java.util.concurrent.ConcurrentHashMap#put,该内容实现委托给方法java.util.concurrent.ConcurrentHashMap#putVal。
该方法整体上可以为分为三个部分:
- 使用
spread方法得到key的hashcode - 将KV对在
Entry[]寻找合适的位置放入 - 容器内元素总数+1,并且在需要时执行扩容。
第一步没什么好说的,直接来看第二步的相关代码,如下
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
tab = initTable();//初始化数组,标记1
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break; //标记2
}
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f); //标记3
else {
V oldVal = null;
synchronized (f) {
//省略相关代码,标记4
}
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i); //标记5
if (oldVal != null)
return oldVal;
break;
}
}
}
代码比较复杂,我们分成了5个标记进行说明。
首先是标记1,如果尝试添加元素时发现table属性为null,则意味着整个容器尚未初始化,此时执行初始化方法,也就是initTable,代码如下
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
if ((sc = sizeCtl) < 0)
Thread.yield(); // lost initialization race; just spin
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = tab = nt;
sc = n - (n >>> 2);
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}
整体思路很明确,通过CAS争夺sizeCtl属性的控制权,成功将该值设置为-1的线程可以执行初始化工作,而其他线程通过Thread.yield()进行等待,直到确认容器初始化完毕,也就是table属性有了值。当初始化完毕时,sizeCtl会被设置为下一次扩容的容量阀值,该值为当前容量的3/4。
如果容器已经初始化,并且Key的hashcode对应的槽位为空,则可以考虑新建一个节点放入该槽位。也就是标记2。这里解释下槽位上数据的读取,都是通过方法tabAt,代码如下
static final <K,V> Node<K,V> tabAt(Node<K,V>[] tab, int i) {
return (Node<K,V>)U.getObjectVolatile(tab, ((long)i << ASHIFT) + ABASE);
}
该取值方法是通过计算对应槽位在数组中的便宜量的值,即((long)i << ASHIFT) + ABASE,也就是基础偏移量+元素间隔偏移量。并且读取的时候使用的是getObjectVolatile,该方法的读取和对属性使用volatile是一样的效果,可以保证读取到最新的值。
接着来看标记2,在槽位为null的情况下,其对值的写入采用了CAS方式,也是为了保证并发的安全性。如果CAS成功,则元素添加完毕,可以直接退出循环。如果CAS失败,则意味着有其他线程已经对相同的槽位操作成功,此时就要重新循环,确认最新的情况。
如果对应的槽位不为空,且其hashcode标识为特定负数,也就是标识容器正在扩容的负数,此时需要协助进行容器扩容,也就是标记3。
这里对Key的hashcode做一个说明,由于key的hashcode会经过方法spread处理,因此必然为正数。而负数的hashcode有三个特殊的含义,分别是:
- -1:代表容器在扩容,并且当前节点的数据已经前移到扩容后的数组中。
- -2:代表当前槽位上的节点采用红黑树结构存储。
- -3:代表该节点正在进行函数式运算,节点值还未最终确定。
协助扩容的分析与容器扩容放在一起,这边先暂时略过。
如果对应槽位不为空,且hashcode不为负数,就意味着该槽位可以执行元素添加,也就是标记4。来看下对应的代码,如下
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) {
//省略相关代码,其内容为在链表上添加元素,将元素添加到队列的末尾
}
else if (f instanceof TreeBin) {
//省略相关代码,其内容为在红黑树结构上添加元素
}
}
}
为了保证对同一个槽位上并发更新的安全性,需要对槽位上的节点执行加锁操作。
取得锁之后,首先确认当前槽位上的节点是否仍然是加锁成功的节点,一致的情况说明加锁成功的前后,槽位上数据形式没有变动,才能执行后续的操作。
加锁完毕后,判断槽位上节点的类型,如果hashcode大于等于0,是为普通节点,意味着该槽位上的数据采样链表形式存储,否则判断节点类型(必然为红黑树节点,也就是TreeBin),确认其为红黑树节点。
普通节点的添加很简单,通过对比节点中的key和Value是否和要添加的KV对一致来判断是否重复,没有重复的情况下就添加到队尾。重复的情况下则依据方法入参onlyIfAbsent的值判断是否要进行替换。
红黑树节点的添加则比较复杂,具体算法可以参看红黑树,这边不再赘述。
当元素添加成功后,如果当前槽位采用链表存储节点,并且链表长度超过阀值,则将链表转化为红黑树结构。也就是标记5。
数据放入完毕后,就是对容器内元素个数的总数进行增加操作了,也就是第三步的内容。
容器元素总数更新
元素总数更新是依靠方法addCount完成。该方法总体分为两个步骤:
- 总数更新
- 根据入参和当前总数,判断是否执行扩容。
首先来看总数更新的部分,代码如下
if ((as = counterCells) != null ||
!U.compareAndSwapLong(this, BASECOUNT, b = baseCount, s = b + x)) {
CounterCell a; long v; int m;
boolean uncontended = true;
if (as == null || (m = as.length - 1) < 0 ||
(a = as[ThreadLocalRandom.getProbe() & m]) == null ||
!(uncontended =
U.compareAndSwapLong(a, CELLVALUE, v = a.value, v + x))) {
fullAddCount(x, uncontended);
return;
}
if (check <= 1)
return;
s = sumCount();
}
整体的更新思路实际上和JDK8新增的一个统计类是完全一致的,即java.util.concurrent.atomic.LongAdder。这个类用于在更高的并发竞争下,降低或维持数字计算的延迟。其性能相较传统的AtomicLong要更好。具体的代码分析这边就不展开了,但是说下核心思路:
- 整个统计的数据结构包含一个基本的长整形变量baseCount和一个统计单元CounterCell构成的数组,数组的长度为2的次方幂,初始长度为2,最大长度超过CPU内核数时停止扩容。
- 当统计数字需要变化时,优先在baseCount上执行CAS操作。如果CAS成功,则意味着更新完成。如果失败,说明此时有多线程竞争,放弃在
baseCount上的争夺。 - 当放弃在
baseCount上的争夺时,通过线程上的随机数h在CounterCell[]数组上找到槽位,在槽位上的CounterCell内部的整型变量上循环执行CAS更新,直到成功。 - 如果需要初始化
CounterCell[]数组或者添加元素到具体槽位,或者库容,只能一个线程进行,该线程需要对cellBusy这个属性进行CAS争夺并且成功。
这个算法的核心思路就是避免多线程在一个变量上循环CAS直到成功。因为当多线程竞争较为激烈时,大量的线程会在不断的CAS失败中浪费很多CPU时间。通过线程变量的方法,将多线程分散到不同的CounterCell单元中,降低了竞争的烈度和颗粒度,因此能够提高并发效率。
由于统计数据被分散在baseCount和CounterCell[]中,执行总数计算时也需要遍历这里面所有的值相加才能得到最终值。
总数更新完毕后,就到了扩容判断环节了。
容器扩容
容器扩容判断是在总数更新中的部分代码实现的,具体如下
Node<K,V>[] tab, nt; int n, sc;
while (s >= (long)(sc = sizeCtl) && (tab = table) != null &&
(n = tab.length) < MAXIMUM_CAPACITY) {
int rs = resizeStamp(n);//标记1
if (sc < 0) {//标记2
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 ||
sc == rs + MAX_RESIZERS || (nt = nextTable) == null ||
transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
}
else if (U.compareAndSwapInt(this, SIZECTL, sc,
(rs << RESIZE_STAMP_SHIFT) + 2))//标记3
transfer(tab, null);
s = sumCount();
}
可以看到,扩容的依据是sizeCtl这个属性,当容器元素总数超过sizeCtl时,执行扩容流程。
首先第一步标记1,是对容器内当前数组长度计算盖戳标记值,也就是resizeStamp,其具体代码如下
static final int resizeStamp(int n) {
return Integer.numberOfLeadingZeros(n) | (1 << (RESIZE_STAMP_BITS - 1));
}
由于n是2的次方幂,Integer.numberOfLeadingZeros(n)是获得32位整型数字中,在第一个1的位之前有多少个0的结果,因此这个值实际上就是数字n的一种换算关系。
RESIZE_STAMP_BITS则意味着该结果能够占据的比特位数。由于Integer.numberOfLeadingZeros(n)最大值为28(n的最小值为16),因此RESIZE_STAMP_BITS最小也必须为6。
这个方法计算出来的结果,实际上可以看成是数组的长度的固定换算值。这个值可以在多线程扩容过程用于判断是否扩容完毕了。
这里要对sizeCtl这个属性做一下说明,其取值有如下规律:
- 0:这是一个初始值,意味着此时数组尚未初始化。
- -1:这是一个控制值,意味着有线程取得了数组的初始化权利,并且正在执行初始化中。
- 正数:该值是容器要扩容的阀值,一旦元素总数到达该值,则应该进行扩容。除非数组长度到达上限。
- 非-1的负数:该值意味着当前数组正在扩容,该值的左边
RESIZE_STAMP_BITS个数的比特位用于存储数组长度n的盖戳标记,右边32-RESIZE_STAMP_BITS位用于存储当前参与扩容的线程数。
回到扩容的代码,标记1代码完成后,就开始判断是执行扩容还是协助扩容。如果sizeCtl当前值为负数,就协助扩容也就是标记2;如果为正数,就发起扩容,也就是标记3。
首先来看标记3,也就是发起扩容。需要通过CAS对sizeCtl的值进行置换。发起扩容时需要置换的值的含义上面也说过,左边是盖戳标记,右边是参与扩容的线程数。
来看下扩容的具体代码,也就是transfer方法,该方法较为复杂,具体区分为几个步骤:
- 步骤一:计算当前线程本次前移的槽位个数
- 步骤二:初始化扩容后的数组对象,赋值给属性
nextTable - 步骤三:按照步骤一计算的结果,从数组的末尾开始,每批迁移一定槽位上的节点到新的数组直到全部迁移完毕;将新的数组的值赋值给属性
table,将属性nextTable设置为null,计算新的sizeCtl,迁移完成。
首先来看步骤一,很简单,只有一句代码
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE;
默认情况下,每次迁移1/8的槽位。
步骤二一样也很简单,就是一个基本的赋值动作,就不展开了。
步骤三比较复杂,在细分为几个阶段:
- 阶段一:计算本次迁移开始的槽位下标和数量。
- 阶段二:判断迁移是否完成,如果完成则设置相关属性。
- 阶段三:按照阶段一的槽位下标和数量,执行迁移。
先来看阶段一,代码如下
boolean advance = true;
boolean finishing = false;
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
for (int i = 0, bound = 0;;) {
Node<K,V> f; int fh;
while (advance) {
int nextIndex, nextBound;
if (--i >= bound || finishing)
advance = false;
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
else if (U.compareAndSwapInt(this, TRANSFERINDEX, nextIndex,nextBound = (nextIndex > stride ?nextIndex - stride : 0))) {
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
//阶段二代码
//阶段三代码
}
transferIndex的初值为数组的长度。确定本次前移的槽位范围是第二个else if来决定的。通过CAS争夺,将transferIndex的值降低。CAS成功后,本次减少的transferIndex值对应的区域,就是本次迁移的区域。通过这种方式,每个线程都可以在自己独立的槽位范围内作业而不会互相争夺,避免竞争。
阶段二用于判断迁移是否完成,具体代码如下
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
if (finishing) {
nextTable = null;
table = nextTab;
sizeCtl = (n << 1) - (n >>> 1);
return;
}
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
finishing = advance = true;
i = n;
}
}
当i小于0时意味着迁移已经结束了,此时先减少迁移线程技术,也就是CAS代码U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)完成的功能。通过确认是否是最后一个退出迁移的线程,也就是代码 if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)完成的功能,来执行最后一次的检查,也就是将i设置为数组长度值n。再执行一次总体循环,检查每一个槽位都迁移完毕。
最后一次确认完毕后,就开始进行退出操作。也就是相关的赋值动作,这部分简单,不展开说明了。
阶段三用于执行迁移槽位,最为复杂,来看代码
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd);
else if ((fh = f.hash) == MOVED)
advance = true;
else {
synchronized (f) {
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;
if (fh >= 0) {
//省略代码,从链表中迁移数据到新数组
setTabAt(tab, i, fwd);
advance = true;
}
else if (f instanceof TreeBin) {
//省略代码,从红黑树中读取元素放入新数组
setTabAt(tab, i, fwd);
advance = true;
}
}
}
}
逐个槽位进行判断,这个是通过外层最大的for循环来执行的。针对每一个槽位,具体情况具体分析。
- 如果槽位为null,则尝试通过CAS将一个标识迁移的特殊节点,
ForwardingNode放入槽位。 - 如果槽位上的节点已经是
ForwardingNode,则忽略,寻找下一个槽位。 - 不是以上两种情况,则对槽位节点加锁。成功后,执行数据迁移,迁移完毕后,将槽位节点设置为
ForwardingNode,用以标识迁移完毕。
以链表的数据迁移为例进行分析,代码如下
int runBit = fh & n;
ConcurrentHashMap.Node<K, V> lastRun = f;
for (ConcurrentHashMap.Node<K, V> p = f.next; p != null; p = p.next)
{
int b = p.hash & n;
if (b != runBit)
{
runBit = b;
lastRun = p;
}
}
if (runBit == 0)
{
ln = lastRun;
hn = null;
}
else
{
hn = lastRun;
ln = null;
}
for (ConcurrentHashMap.Node<K, V> p = f; p != lastRun; p = p.next)
{
int ph = p.hash;
K pk = p.key;
V pv = p.val;
if ((ph & n) == 0)
{
ln = new ConcurrentHashMap.Node<K, V>(ph, pk, pv, ln);
}
else
{
hn = new ConcurrentHashMap.Node<K, V>(ph, pk, pv, hn);
}
}
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
对于数组长度为n,下标在i上的节点而言,执行2倍扩容后,其下标或者仍然为i,或者为i+n。
因此迁移之前首先遍历链表,将链表中的节点分为两个部分:迁移后下标值不一致和迁移后下标值一致,并且以一致的首节点作为分界线,也就是lastRun变量。runBit为0,意味着lastRun和之后的部分,迁移后下标不变;runBit不为0,意味着lastRun和之后的部分,迁移后下标变为i+n。
遍历首节点到lastRun节点之间的部分,计算其迁移后的下标,构建新的node对象,并且形成链表。而后添加到新的数组中
协助扩容
在执行元素更新操作时,如果槽位上的节点为ForwardingNode,则意味着当前容器正在扩容,则需要进行协助扩容,也就是方法helpTransfer的内容。代码如下
final Node<K,V>[] helpTransfer(Node<K,V>[] tab, Node<K,V> f) {
Node<K,V>[] nextTab; int sc;
if (tab != null && (f instanceof ForwardingNode) &&
(nextTab = ((ForwardingNode<K,V>)f).nextTable) != null) {
int rs = resizeStamp(tab.length);
while (nextTab == nextTable && table == tab &&
(sc = sizeCtl) < 0) {
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 ||
sc == rs + MAX_RESIZERS || transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1)) {
transfer(tab, nextTab);
break;
}
}
return nextTab;
}
return table;
}
这一段代码和addCounter中的扩容判断部分完全一致。
首先仍然是对当前数组长度计算盖戳标记,也就是resizeStamp。其后在while循环中判断是否要进行协助。while条件nextTab == nextTable && table == tab && (sc = sizeCtl) < 0表明了当前正在进行扩容,需要协助。
来看第一个if判断:
(sc >>> RESIZE_STAMP_SHIFT) != rs意味着数组长度已经发生变化,扩容可能已经结束,不需要协助。transferIndex <= 0意味着原始数组已经没有可以分配的扩容区域,不需要协助sc == rs + 1 || sc == rs + MAX_RESIZERS这个条件永远不会达成,属于bug。具体可以看https://bugs.java.com/bugdatabase/view_bug.do?bug_id=JDK-8214427
如果确认需要协助,就来到第二个if。通过CAS的方式,增加了一个协助线程数量,然后执行迁移方法。
遍历
遍历的实现难度主要是在于遍历的过程中元素可能会新增或者删除,或者遇到扩容的情况。分情况分析:
- 遍历时容器没有变化
- 遍历时容器元素有新增或者删除
- 遍历时容器正在扩容
遍历是通过生成迭代器方式进行,主要三个方法keySet,valueSet,entrySet。但是遍历的机制都是相同的,具体的实现都是依赖java.util.concurrent.ConcurrentHashMap.Traverser实现的迭代器。
首先来看下该类的重要属性
Node<K,V>[] tab;//当前迭代器需要遍历的数组
Node<K,V> next; //迭代器next方法将要返回的值
TableStack<K,V> stack, spare; // 在遍历过程中遇到ForwardingNodes节点时,存储当前遍历信息的对象
int index; //下一个要遍历的槽位的下标
int baseIndex; //初始槽位数组的当前遍历下标
int baseLimit; //初始槽位数组的遍历下标的终值
final int baseSize; //初始遍历数组的大小
从迭代器的tab属性可以推测出迭代的取值是从tab中来定位对应的槽位的。而从baseLimit属性则可以推测出遍历的是从下标0开始的。而baseSize是初始数组的大小且为final,意味着遍历的范围只针对初始数组。结合以上三点,可以得到遍历的第一个原则.
遍历是以迭代器初始化入参的数组为依据,从下标0开始,遍历到baseLimit截止。
关于迭代器的可见性,在遍历的时候,容器元素可能添加或者是删除,对于在遍历下标之前的槽位,元素的添加或者删除是不可见的,也不关心。而在遍历下标之后的槽位上的元素新增删除,在遍历到具体的槽位时即可发现。对槽位的读取,上面介绍过,采用的是volatile的方式,因此都可以看到最新的数据。
最复杂的情况要属在遍历的时候遇到容器扩容的情况。迭代器的最基本保证就是不能遍历到重复的元素。但是容器的扩容的时候,下标i的节点会被重新分配到i和i+n(原数组长度)的位置。也就是i+n-1位置上会有部分原本数组上i-1的元素,如果遍历到这个槽位,则会导致重复的元素在遍历中出现。
这边以图的形式更容易来说明,首先见下图
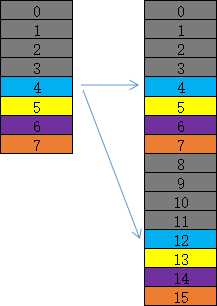
下标0-3均已遍历过,在遍历下标4的槽位时发现了该节点是一个ForwardingNode节点,这意味着该数组上剩余的槽位上的节点均已迁移到新的数组中。两个数组中相同颜色的槽位意味着存在节点的迁移关系。比如槽位4上的节点就会迁移到新数组的槽位4和槽位12中。而灰色的部分意味着存在着已经遍历过的槽位。显然,从新数组的下标4开始遍历,一旦遍历到8-11槽位,就会遍历到重复的数据,这显然是不允许的。
ConcurrentHashMap的做法就是仍然遍历原始数组,但是发现槽位节点是ForwardingNode,则遍历ForwardingNode节点指向的数组,并且只遍历其i和i+n槽位的数据。然后回归原始数组,继续这个流程。这样的做法,就能避免遍历到新数组中可能存在重复数据的槽位。当然,同时也忽略了这些槽位上新增的数据,但是至少保证了数据的正确性。
知道了算法思路,再来看代码就好理解多了。私以为,这段代码算是最不好理解的部分了(排除红黑树)。
final Node<K,V> advance() {
Node<K,V> e;
if ((e = next) != null)
e = e.next;
for (;;) {
Node<K,V>[] t; int i, n; // must use locals in checks
if (e != null)
return next = e;
if (baseIndex >= baseLimit || (t = tab) == null ||
(n = t.length) <= (i = index) || i < 0)//标记1
return next = null;
if ((e = tabAt(t, i)) != null && e.hash < 0) {//标记2
if (e instanceof ForwardingNode) {
tab = ((ForwardingNode<K,V>)e).nextTable;//标记3
e = null;
pushState(t, i, n);
continue;
}
else if (e instanceof TreeBin)
e = ((TreeBin<K,V>)e).first;
else
e = null;
}
if (stack != null) //标记4
recoverState(n);
else if ((index = i + baseSize) >= n) //标记5
index = ++baseIndex; // visit upper slots if present
}
}
方法advance用于确定next方法可以返回的值,也就是确定next属性的值。通过标记1的代码,i = index,可以确定本次需要寻找的槽位,通过标记2的代码e = tabAt(t, i)获取到槽位上的节点。
如果节点是ForwardingNode类型,则意味该槽位和后续的槽位都已经迁移完毕了,因为迁移的时候是从数组的末尾向前开始的。此时将需要遍历的数组切换为本次扩容后的数组,也就是代码tab =((ForwardingNode<K,V>)e).nextTable的含义。切换完成后,保存此时的遍历状态信息,也就是方法pushState的内容,来看下具体的代码
private void pushState(Node<K,V>[] t, int i, int n) {
TableStack<K,V> s = spare; // reuse if possible
if (s != null)
spare = s.next;
else
s = new TableStack<K,V>();
s.tab = t;
s.length = n;
s.index = i;
s.next = stack;
stack = s;
}
这个方法的内容是通过TableStack形成一个堆栈的数据结构。每次保存遍历状态信息都是一次压栈操作。为了减低GC,提升效率,会将不再使用的TableStack对象以反向的形式连接起来,链表头存储在spare属性。当需要压栈时,可以先尝试从spare获取对象进行复用,而不是马上新建对象。
遍历状态信息保存完毕后,就从扩容后的数组开始遍历。通过标记1和2的代码获取了槽位i上的新的节点。此时就可以针对该槽位进行遍历,不过在遍历之前,需要先确定下一次遍历的下标。也即是标记4的代码内容。来看下方法recoverState。在标记4的调用中,其入参n是传入的扩容后的数组大小。方法代码如下
private void recoverState(int n) {
TableStack<K,V> s; int len;
while ((s = stack) != null && (index += (len = s.length)) >= n) {
n = len;
index = s.index;
tab = s.tab;
s.tab = null;
TableStack<K,V> next = s.next;
s.next = spare; // save for reuse
stack = next;
spare = s;
}
if (s == null && (index += baseSize) >= n)
index = ++baseIndex;
}
在扩容后的数组第一次进入该方法,实际的作用就是将index的值从i增加到i+n。也就是代码index += (len = s.length))>= n的作用。第一次进入的时候,这个表达式为false。第二次进入的时候则为true。那就意味着上次压栈的TableStack保存的旧的数组和遍历下标在新的数组中对应的两个下标位置i和i+n都遍历完毕了。此时进行一个弹栈操作,并且将需要遍历的数组还原为旧的数组,下标和长度信息也还原为压栈时的情况。
一直执行弹栈操作,直到栈空或者再次在某一个扩容数组上index处于有效值,也就是(index += (len = s.length)) < n为真。index是有效值,则遍历该数组该下标的槽位上的节点。如果栈空,则意味着遍历回到了初始数组上,也就是s == null条件成立,此时将index的值加1,也就是index = ++baseIndex,然后继续遍历。
而下一个槽位上的节点,也会是ForwardingNode类型,重复这个流程,直到初始数组遍历完毕。
文章原创首发于公众号:林斌说Java,转载请注明来源,谢谢。
欢迎扫码关注
