图像:
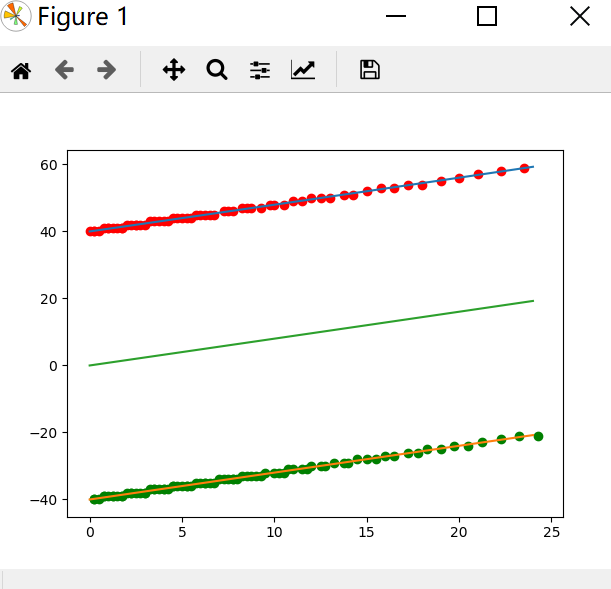
import cv2 import numpy as np import matplotlib.pyplot as plt import sklearn.cluster as skc #import time as t name = "7.jpg" bin_method = 'b' width = 100 height = 75 rate = (width*height/200.0/150.0)**0.5 #param scale rate BlurPar = 15 fix_order = 2 cannyPar = 100 image = cv2.imread(name, 0) def road_detect(image): # 预处理 image = cv2.GaussianBlur(image, (BlurPar,BlurPar), 0) image = cv2.resize(image,(width, height)) if bin_method == 'b': ret,image = cv2.threshold(image,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU) else: image=cv2.Canny(image, cannyPar/2.5, cannyPar) line = [] # 筛选点 for i in range(0, image.shape[0]): for j in range(0, image.shape[1]): if image[i][j]>100: line.append([(image.shape[0]-i)/4.0, j-image.shape[1]/2.0]) linea = np.asarray(line) # DBSCAN if bin_method == 'b': min_pts = 30*rate else: min_pts = 20*rate db=skc.DBSCAN(eps=16*rate,min_samples=min_pts).fit(linea) label_pred = db.labels_ #n_clusters_ = len(set(label_pred)) - (1 if -1 in label_pred else 0) x0 = linea[label_pred == 0] x1 = linea[label_pred == 1] plt.scatter(x0[:, 0], x0[:, 1], c = "red") ##################### plt.scatter(x1[:, 0], x1[:, 1], c = "green") ##################### # 线性回归 xt=np.arange(0,image.shape[0]/4,0.5) ##################### line_model1 = np.polyfit(x0[:, 0], x0[:, 1], fix_order) yt1=np.fromiter(map(np.poly1d(line_model1),xt), dtype = float) ##################### plt.plot(xt,yt1) ##################### line_model2 = np.polyfit(x1[:, 0], x1[:, 1], fix_order) yt2=np.fromiter(map(np.poly1d(line_model2),xt), dtype = float) ##################### plt.plot(xt,yt2) ##################### line_model = line_model1+line_model2 yt=np.fromiter(map(np.poly1d(line_model),xt), dtype = float)/2.0 ##################### plt.plot(xt,yt) ##################### print(np.poly1d(line_model)) #--------------------------# plt.show() ##################### return line_model #t1 = t.time() road_detect(image) #t2 = t.time() #print("time : ",t2-t1) #--------------------------#
雷达
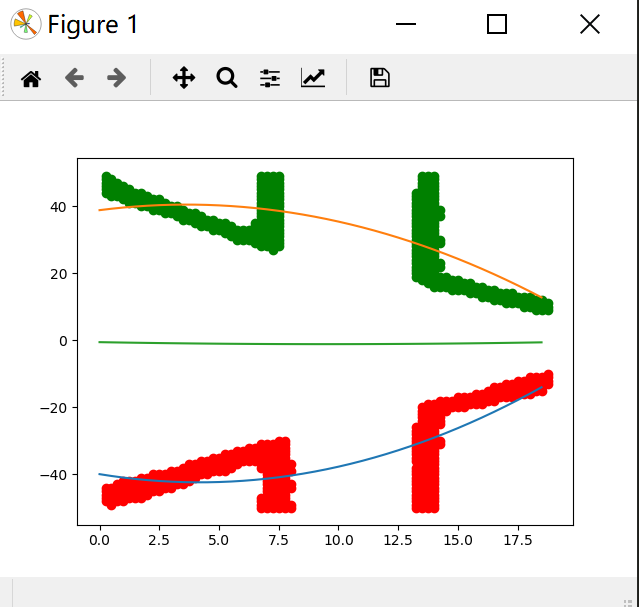
import math as m import numpy as np import matplotlib.pyplot as plt import sklearn.cluster as skc accuracy = 1 # cm detect_range = 100 # cm rotate_angle = 0 fix_order = 2 eps_par = 20 #聚类点距离 def road_laser_detect(ranges, range_max, range_min): line = [] ymax = 0 wh = detect_range//accuracy # 筛选点 for i in range(360): if ranges[i]>range_min and ranges[i]<range_max: x = int(round(ranges[i] * 100 / accuracy * m.cos(m.radians(i+rotate_angle)))) y = int(round(ranges[i] * 100 / accuracy * m.sin(m.radians(i+rotate_angle)))) if abs(x)<wh and y < wh and y >= 0: line.append([y/4.0, x]) if y>ymax: ymax = y linea = np.asarray(line) # DBSCAN db=skc.DBSCAN(eps=eps_par, min_samples=10).fit(linea) label_pred = db.labels_ #n_clusters_ = len(set(label_pred)) - (1 if -1 in label_pred else 0) x0 = linea[label_pred == 0] x1 = linea[label_pred == 1] plt.scatter(x0[:, 0], x0[:, 1], c = "red") ################## plt.scatter(x1[:, 0], x1[:, 1], c = "green") ################## # 线性回归 xt=np.arange(0,ymax/4.0,0.5) ##################### line_model1 = np.polyfit(x0[:, 0], x0[:, 1], fix_order) yt1=np.fromiter(map(np.poly1d(line_model1),xt), dtype = float) ##################### plt.plot(xt,yt1) ##################### line_model2 = np.polyfit(x1[:, 0], x1[:, 1], fix_order) yt2=np.fromiter(map(np.poly1d(line_model2),xt), dtype = float) ##################### plt.plot(xt,yt2) ##################### line_model = line_model1+line_model2 yt=np.fromiter(map(np.poly1d(line_model),xt), dtype = float)/2.0 ##################### plt.plot(xt,yt) ##################### print(np.poly1d(line_model)) #--------------------------# plt.show() ##################### return line_model # 模拟数据测试 a=np.arange(0,360,dtype = np.int) o = np.zeros(360) for i in range(360): o[i] = m.radians(a[i]) p = np.zeros(360) for i in range(360): if i < 90: p[i] = -2/(m.sin(o[i])-5*m.cos(o[i])) elif i >= 270: p[i] = 3/(m.sin(o[i])+5*m.cos(o[i])) elif i >= 90 and i <180: p[i] = 2/(m.sin(o[i])-5*m.cos(o[i])) else: p[i] = -3/(m.sin(o[i])+5*m.cos(o[i])) road_laser_detect(p, 10, 0.1)
图像:
 ===》
===》 
 ===》
===》 
雷达: