此书极好,值得借鉴学习,并且开源开放。Python在实现过程中,体现出来了非常强的优势,特别是结合Numpy来进行矩阵计算,有很多简化方法。这里将学习过程代码进行增编、添加后进行展示。
Python目前的缺点应该是缺乏一个像ImageWatch这样的工具,这将影响算法研究;另外Numpy的过度抽象,某种程度上也会造成障碍。
1、寻找指定色彩区域
Python的特色,在于Numpy的使用
import cv2
import numpy as np
src = cv2.imread("e:/template/tiantan.jpg")
hsv = cv2.cvtColor(src,cv2.COLOR_BGR2HSV)
lower_blue = np.array([100,43,46])
upper_blue = np.array([124,255,255])
mask = cv2.inRange(hsv,lower_blue,upper_blue)
res = cv2.bitwise_and(src,src,mask=mask)
cv2.imshow("hsv",hsv)
cv2.imshow("mask",mask)
cv2.imshow("res",res)
cv2.waitKey(0)
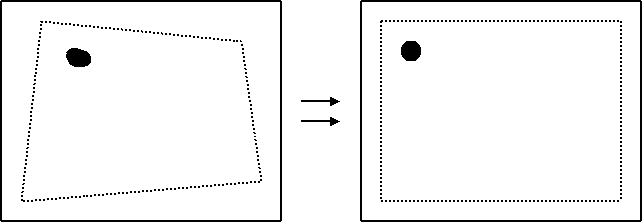
2、warpperspective 透视变化的python实现
import cv2
import numpy as np
src = cv2.imread("e:/template/steel03.jpg")
rows,cols,ch = src.shape
pts1 = np.float32([[122,0],[814,0],[22,540],[910,540]])
pts2 = np.float32([[0,0],[960,0],[0,540],[960,540]])
M = cv2.getPerspectiveTransform(pts1,pts2)
dst = cv2.warpPerspective(src,M,(cols,rows))
cv2.imshow("src",dst)
cv2.waitKey(0)
这里操作的核心,是一个np的矩阵。在C++中,使用Vector,可能会造成很多浪费。
3、自适应阈值
import cv2
import numpy as np
obj = cv2.imread("e:/template/pig.jpg",0)
ret,th1 = cv2.threshold(obj,100,255,cv2.THRESH_BINARY)
th2 = cv2.adaptiveThreshold(obj,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,11,2)
ret3,th3 = cv2.threshold(obj,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
cv2.imshow("th3",th3)
print(ret3)
cv2.waitKey()
当参数选择OTSU的时候,能够根据计算,自动算出下限。但是我认为这一点并没有什么特别的用途。
4、模糊处理
obj = cv2.imread("e:/template/pig.jpg",0)
blur= cv2.blur(obj,(3,3))
gaussBlur=cv2.GaussianBlur(obj,(3,3),0)
median = cv2.medianBlur(obj,5)
bilate = cv2.bilateralFilter(obj,0.75,0.75)
5、形态学变换
obj = cv2.imread("e:/template/pig.jpg",0)
opening = cv2.morphologyEx(obj,cv2.MORPH_OPEN,(7,7))
cv2.imshow("obj",obj)
cv2.imshow("opening",opening)
我喜欢这种写法,这将有长远影响。
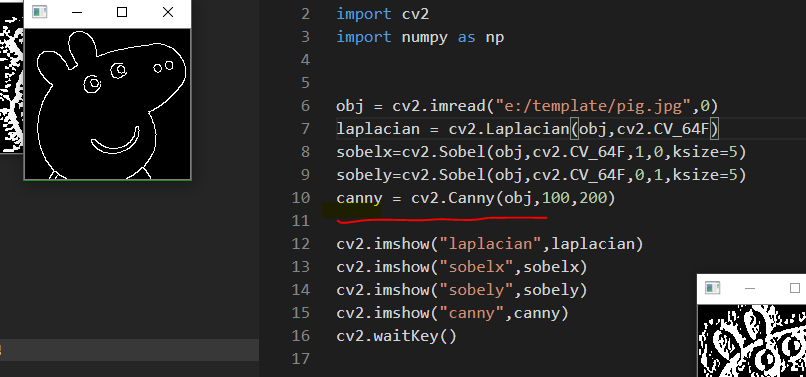
6、梯度变化,包括1阶、2阶和混合的。
obj = cv2.imread("e:/template/pig.jpg",0)
laplacian = cv2.Laplacian(obj,cv2.CV_64F)
sobelx=cv2.Sobel(obj,cv2.CV_64F,1,0,ksize=5)
sobely=cv2.Sobel(obj,cv2.CV_64F,0,1,ksize=5)
7、梯度融合
曾经这段代码很神秘的,但是今日使用Python来写,就非常简单。可以看出,Python用来处理二维矩阵信息是很强的。
# Standard imports
import cv2
import numpy as np
A = cv2.imread("e:/template/apple.jpg")
B = cv2.imread("e:/template/orange.jpg")
G = A.copy()
gpA=[G]
for i in range(6):
G = cv2.pyrDown(G)
gpA.append(G)
G = B.copy()
gpB = [G]
for i in range(6):
G = cv2.pyrDown(G)
gpB.append(G)
lpA = [gpA[5]]
for i in range(5,0,-1):
GE = cv2.pyrUp(gpA[i])
L = cv2.subtract(gpA[i-1],GE)
lpA.append(L)
lpB = [gpB[5]]
for i in range(5,0,-1):
GE = cv2.pyrUp(gpB[i])
L = cv2.subtract(gpB[i-1],GE)
lpB.append(L)
LS = []
for la,lb in zip(lpA,lpB):
rows,cols,dpt= la.shape
print(rows,cols)
ls = np.hstack((la[:,0:cols//2],lb[:,cols//2:])) #直接横向排列
LS.append(ls)
ls_ = LS[0]
for i in range(1,6):
ls_ = cv2.pyrUp(ls_)
ls_ = cv2.add(ls_,LS[i])
real = np.hstack((A[:,:cols//2],B[:,cols//2:]))
cv2.imshow("ls_",ls_)
cv2.imshow("real",real)
cv2.waitKey()

8、轮廓寻找
import cv2
import numpy as np
src = cv2.imread("e:/template/rectangle.jpg")
gray = cv2.cvtColor(src,cv2.COLOR_BGR2GRAY)
ret,thresh = cv2.threshold(gray,127,255,0)
contours,hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
print(contours)
src = cv2.drawContours(src,contours,-1,(0,255,0),3)
cv2.imshow("src",src)
cv2.waitKey()
这里,使用cv2.CHAIN_APPROX_NONE或者不同的参数的话,会获得不同的轮廓结果。这对于我现有的轮廓分析研究,也是有帮助的。
9、轮廓的最小 接圆和最大内切圆
外接圆比较简单
(x,y),radius = cv2.minEnclosingCircle(contours[0])
center = (int(x),int(y))
radius = int(radius)
src = cv2.circle(src,center,radius,(0,255,0),2)
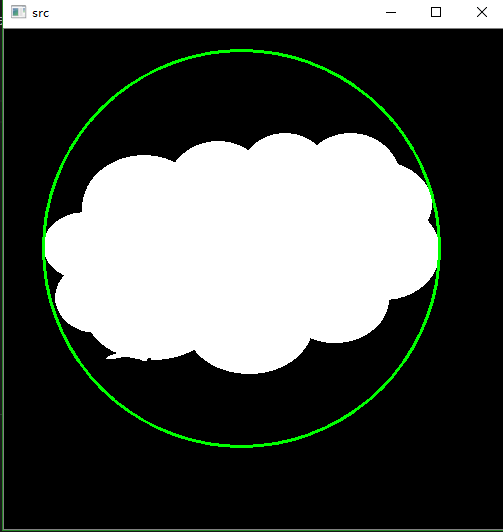
注意它这里的表示方法。内切圆则采用特殊方法。
# Get the contours
contours, _ = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
# Calculate the distances to the contour
raw_dist = np.empty(thresh.shape, dtype=np.float32)
for i in range(src.shape[0]):
for j in range(src.shape[1]):
raw_dist[i,j] = cv.pointPolygonTest(contours[0], (j,i), True)
minVal, maxVal, _, maxDistPt = cv.minMaxLoc(raw_dist)
minVal = abs(minVal)
maxVal = abs(maxVal)
# Depicting the distances graphically
drawing = np.zeros((src.shape[0], src.shape[1], 3), dtype=np.uint8)
for i in range(src.shape[0]):
for j in range(src.shape[1]):
if raw_dist[i,j] < 0:
drawing[i,j,0] = 255 - abs(raw_dist[i,j]) * 255 / minVal
elif raw_dist[i,j] > 0:
drawing[i,j,2] = 255 - raw_dist[i,j] * 255 / maxVal
else:
drawing[i,j,0] = 255
drawing[i,j,1] = 255
drawing[i,j,2] = 255
cv.circle(drawing,maxDistPt,int(maxVal),(255,255,255))
cv.imshow('Source', src)
cv.imshow('Distance and inscribed circle', drawing)
cv.waitKey()
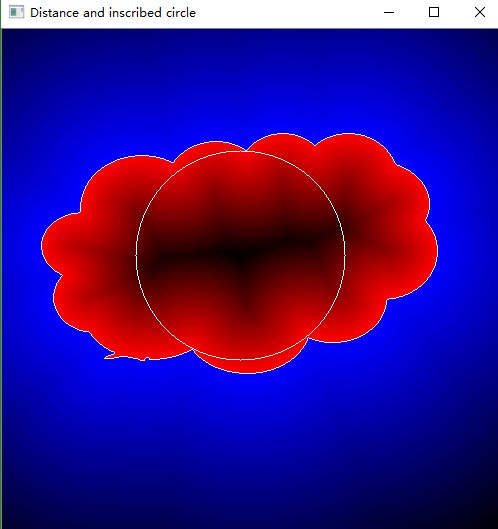
最大内接圆则复杂许多。
10、寻找轮廓的极点
contours, _ = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0]
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost= tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost=tuple(cnt[cnt[:,:,1].argmax()][0])
cv2.circle(src,leftmost,5,(0,255,0))
cv2.circle(src,rightmost,5,(0,255,255))
cv2.circle(src,topmost,5,(255,255,0))
cv2.circle(src,bottommost,5,(255,0,0))
cv2.imshow("src",src)
这是一种很好的方法,能够直接找出轮廓的各方向边界。
11 模板匹配
src = cv.imread("e:/template/lena.jpg",0)
template = cv.imread("e:/template/lenaface.jpg",0)
w,h = template.shape
res = cv.matchTemplate(src,template,cv.TM_CCOEFF)
min_val,max_val,min_loc,max_loc = cv.minMaxLoc(res)
cv.rectangle(src,max_loc,(max_loc[0]+w,max_loc[1]+h),(0,0,255),2)
cv.imshow("template",template)
cv.imshow("src",src)
cv.waitKey()

我想体现的是python它的写法有很大不同。
src = cv.imread("e:/template/coin.jpg")
gray = cv.cvtColor(src,cv.COLOR_BGR2GRAY)
template = cv.imread("e:/template/coincut.jpg",0)
w,h = template.shape
res = cv.matchTemplate(gray,template,cv.TM_CCOEFF_NORMED)
threshold =0.4
loc = np.where(res>=threshold)
print(loc)
for pt in zip(*loc[::1]):
cv.rectangle(src,pt,(pt[0]+w,pt[1]+h),(0,0,255),2)
cv.imshow("template",template)
cv.imshow("src",src)
cv.waitKey()
结合使用阈值,可以实现多目标匹配。
# Standard imports
import cv2 as cv
import numpy as np
src = cv.imread("e:/template/coin.jpg")
gray = cv.cvtColor(src,cv.COLOR_BGR2GRAY)
template = cv.imread("e:/template/coincut.jpg",0)
w,h = template.shape
res = cv.matchTemplate(gray,template,cv.TM_CCOEFF_NORMED)
threshold =0.6
loc = np.where(res>=threshold)
print(loc)
for pt in zip(*loc[::-1]):#排序方法为height width
print(pt)
cv.rectangle(src,pt,(pt[0]+w,pt[1]+h),(0,0,255),2)
cv.imshow("template",template)
cv.imshow("src",src)
cv.waitKey()
特别需要注意其排序方法。但是这里的阈值选择,也是超参数类型的。

12 HoughCircle
src = cv.imread("e:/template/circle.jpg",0)
src = cv.medianBlur(src,5)
cimg = cv.cvtColor(src,cv.COLOR_GRAY2BGR)
circles = cv.HoughCircles(src,cv.HOUGH_GRADIENT,1,20,param1=50,param2=30,minRadius=0,maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
cv.circle(cimg,(i[0],i[1]),i[2],(0,255,0),2)
cv.circle(cimg,(i[0],i[1]),2,(0,0,255),3)
cv.imshow("src",cimg)
cv.waitKey()

13 风水岭算法
# Standard imports
import cv2 as cv
import numpy as np
src = cv.imread("e:/template/water_coins.jpg")
gray =cv.cvtColor(src,cv.COLOR_BGR2GRAY)
_,thresh = cv.threshold(gray,0,255,cv.THRESH_BINARY_INV+cv.THRESH_OTSU)
kernel = np.ones((3,3),np.uint8)
opening = cv.morphologyEx(thresh,cv.MORPH_OPEN,kernel,iterations=2)
sur_bg = cv.dilate(opening,kernel)
dist_transform = cv.distanceTransform(opening,1,5)
_,sur_fg=cv.threshold(dist_transform,0.7*dist_transform.max(),255,0)
sur_fg = np.uint8(sur_fg)
unknow = cv.subtract(sur_bg,sur_fg)
_,markers1 = cv.connectedComponents(sur_fg)
markers = markers1+1
markers[unknow ==255] = 0
markers3 = cv.watershed(src,markers)
src[markers3 == -1] = [255,0,0]
cv.imshow("src",src)
cv.waitKey()

这个结果,具有参考价值。