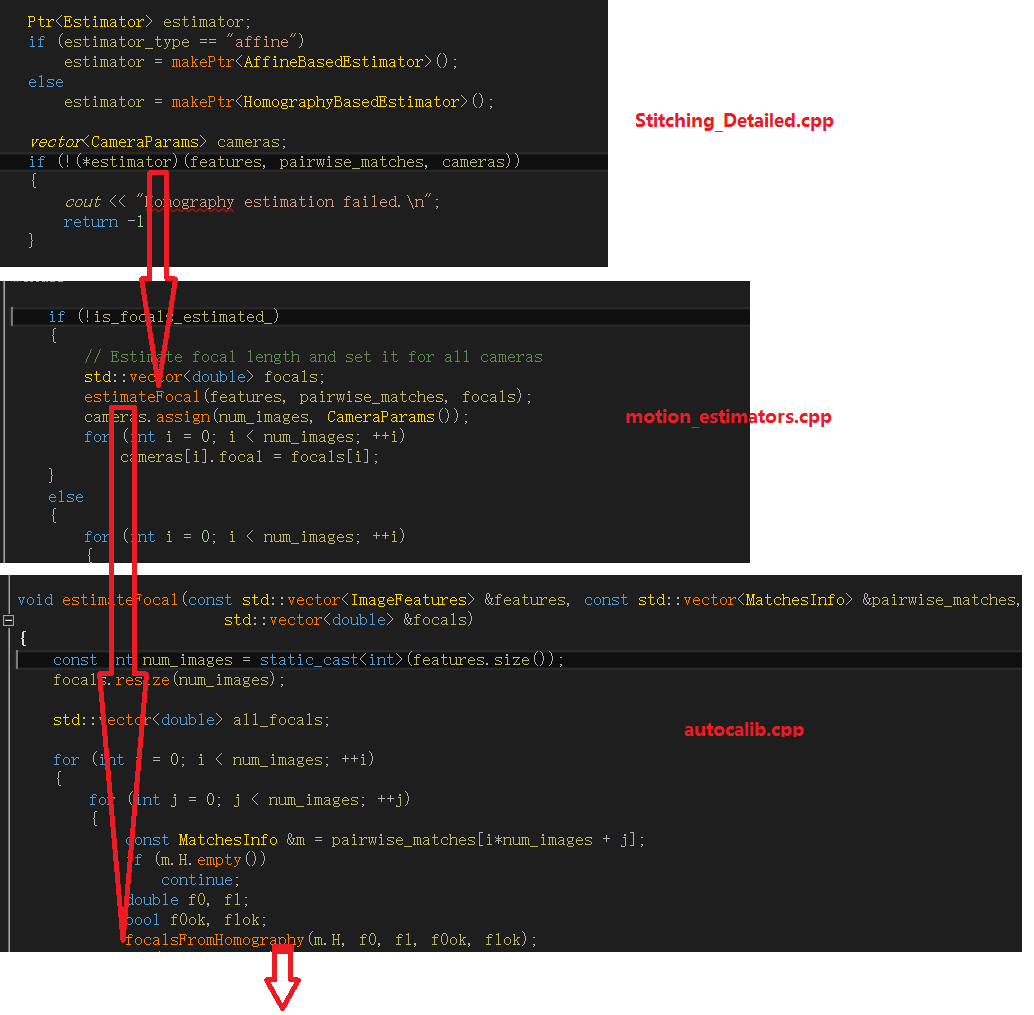
在Stitching模块中,通过“光束法平差”的时候,有一个步骤为“通过单应矩阵估算摄像头焦距”,调用的地方为:
void focalsFromHomography(const Mat& H, double &f0, double &f1, bool &f0_ok, bool &f1_ok)
{
CV_Assert(H.type() == CV_64F && H.size() == Size(3, 3));
const double* h = H.ptr<double>();
double d1, d2; // Denominators
double v1, v2; // Focal squares value candidates
f1_ok = true;
d1 = h[6] * h[7];
d2 = (h[7] - h[6]) * (h[7] + h[6]);
v1 = -(h[0] * h[1] + h[3] * h[4]) / d1;
v2 = (h[0] * h[0] + h[3] * h[3] - h[1] * h[1] - h[4] * h[4]) / d2;
if (v1 < v2) std::swap(v1, v2);
if (v1 > 0 && v2 > 0) f1 = std::sqrt(std::abs(d1) > std::abs(d2) ? v1 : v2);
else if (v1 > 0) f1 = std::sqrt(v1);
else f1_ok = false;
f0_ok = true;
d1 = h[0] * h[3] + h[1] * h[4];
d2 = h[0] * h[0] + h[1] * h[1] - h[3] * h[3] - h[4] * h[4];
v1 = -h[2] * h[5] / d1;
v2 = (h[5] * h[5] - h[2] * h[2]) / d2;
if (v1 < v2) std::swap(v1, v2);
if (v1 > 0 && v2 > 0) f0 = std::sqrt(std::abs(d1) > std::abs(d2) ? v1 : v2);
else if (v1 > 0) f0 = std::sqrt(v1);
else f0_ok = false;
}
{
CV_Assert(H.type() == CV_64F && H.size() == Size(3, 3));
const double* h = H.ptr<double>();
double d1, d2; // Denominators
double v1, v2; // Focal squares value candidates
f1_ok = true;
d1 = h[6] * h[7];
d2 = (h[7] - h[6]) * (h[7] + h[6]);
v1 = -(h[0] * h[1] + h[3] * h[4]) / d1;
v2 = (h[0] * h[0] + h[3] * h[3] - h[1] * h[1] - h[4] * h[4]) / d2;
if (v1 < v2) std::swap(v1, v2);
if (v1 > 0 && v2 > 0) f1 = std::sqrt(std::abs(d1) > std::abs(d2) ? v1 : v2);
else if (v1 > 0) f1 = std::sqrt(v1);
else f1_ok = false;
f0_ok = true;
d1 = h[0] * h[3] + h[1] * h[4];
d2 = h[0] * h[0] + h[1] * h[1] - h[3] * h[3] - h[4] * h[4];
v1 = -h[2] * h[5] / d1;
v2 = (h[5] * h[5] - h[2] * h[2]) / d2;
if (v1 < v2) std::swap(v1, v2);
if (v1 > 0 && v2 > 0) f0 = std::sqrt(std::abs(d1) > std::abs(d2) ? v1 : v2);
else if (v1 > 0) f0 = std::sqrt(v1);
else f0_ok = false;
}
本文具体分析focalsFromHomography,函数的参数定义:
Tries to estimate focal lengths from the given homography
under the assumption that the camera undergoes rotations around its centre only.
Parameters
H – Homography.
f0 – Estimated focal length along X axis.
f1 – Estimated focal length along Y axis.
f0_ok – True, if f0 was estimated successfully, false otherwise.
f1_ok – True, if f1 was estimated successfully, false otherwise.
可以看到它通过输入的单应矩阵,最后得到了相机焦距的估计值,计算的过程也比较复杂。那这样做的理由是什么了?具体计算的时候又是如何实现的了?
论文也就是算法的依据为《Construction of Panoramic Image Mosaics with Global and Local Alignment 》, Heung-Yeung Shum (hshum@microsoft.com) and Richard Szeliski (szeliski@microsoft.com) page 17.method "focals from homgraphy matrix"
我将具体的内容截出来:
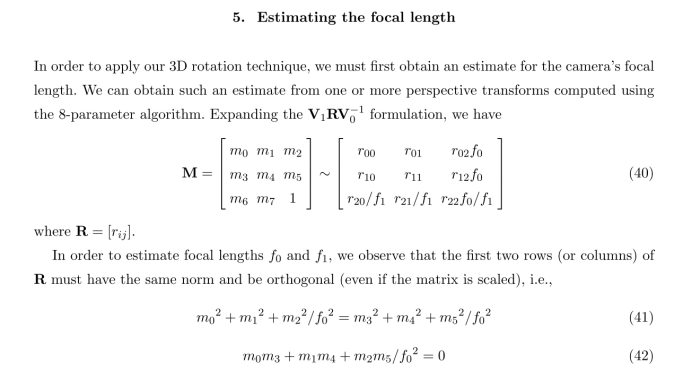
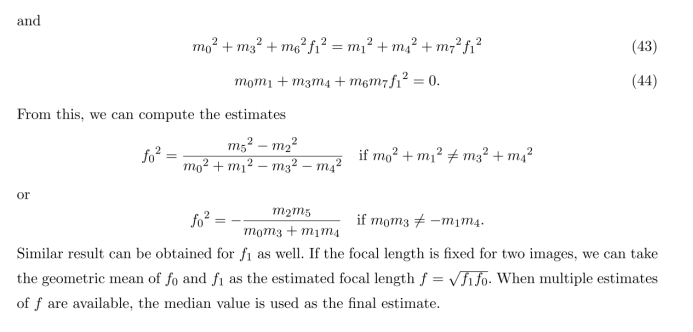
原论文中40-44的推导,分为两个部分。一个部分是从“8参数”的变换,得出和x轴,y轴两个方向焦距的关系;一个部分是通过行列式的数学性质,计算出两个方向的焦距。这两个部分我目前都没有掌握足够的资料来进行证明,如果有能够证明的同学麻烦联系我一下。
然后来看算法实现。如果认为论文的表述是正确的,那么依据数学函数来对比c++的实现
代码中的h0-h8直接对应论文中的m0-m8,仅以f0来观察,那么f0^2可能有两种取值(这里x^2 是 x * x的一种简单表示方法,代表阶乘)
f0^2 = - m2*m5/(m0*m3+m1*m4)或f0^2 = m5^2 - m2^2 /(m0^2 + m1^2 - m3^2 - m4 ^2)
看代码
d1 = h[0] * h[3] + h[1] * h[4];
那么
v1 = -h[2] * h[5] / d1 = -h[2] * h[5] /(h[0] * h[3] + h[1] * h[4])
那么
v1 = -h[2] * h[5] / d1 = -h[2] * h[5] /(h[0] * h[3] + h[1] * h[4])
d2 = h[0] * h[0] + h[1] * h[1] - h[3] * h[3] - h[4] * h[4];
则
v2 = (h[5] * h[5] - h[2] * h[2]) / d2 = (h[5] * h[5] - h[2] * h[2]) / (h[0] * h[0] + h[1] * h[1] - h[3] * h[3] - h[4] * h[4])
则
v2 = (h[5] * h[5] - h[2] * h[2]) / d2 = (h[5] * h[5] - h[2] * h[2]) / (h[0] * h[0] + h[1] * h[1] - h[3] * h[3] - h[4] * h[4])
前后是一一对应的,计算f0^2的两个值是没有问题的。但是这里f0有两个计算结果,最后选择哪个了?这一点在论文中没有说,在代码中采用的方法是首先判断v1,v2的符号,如果都是负数,那么肯定是计算错误了,因为它们所代表的f0^2肯定是非负数;然后判断v1,v2的大小,取其中比较大的那个来进行计算。
但是在
if (v1 > 0 && v2 > 0) f0 = std::sqrt(std::abs(d1) > std::abs(d2) ? v1 : v2);
我认为这样写是没有用的,我也在尝试联系一下相关对这个问题比较熟悉的人共同讨论。f1的计算方法是同样的。到这里已经得到f0和f1,分别对应x轴和y轴,为了得到最后的结果,那么会取
f = sqrt(f0 * f1)
则得到这个当应矩阵的对于焦距的估计值。那么focalsFromHomography的一次运算也就结束了。