伊利诺伊大学汽车检测图像数据库(UIUC Image Database for Car Detection)
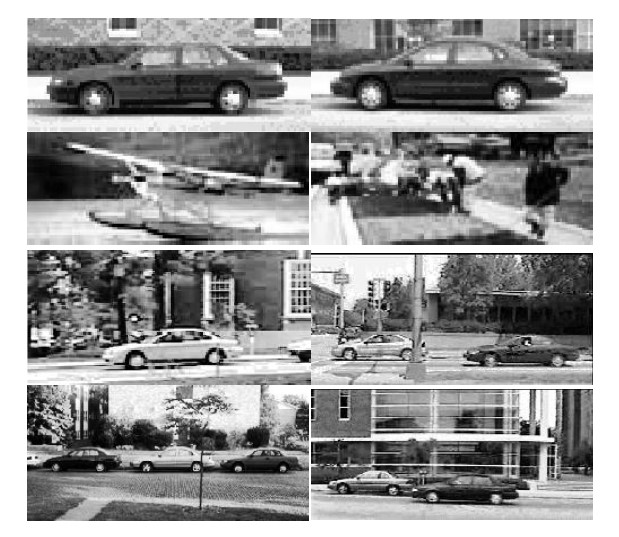
包括1w+的有汽车/无汽车图片,并且精确地标注了汽车位置;同时还包括1k+的测试数据集;
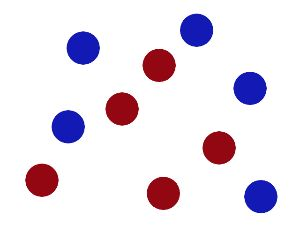
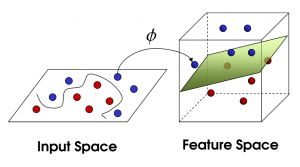
2、什么是svm算法:
SVM(Support Vector Machine)指的是支持向量机,是常见的一种判别方法。在机器学习领域,是一个有监督的学习模型,通常用来进行模式识别、分类以及回归分析。
寻找到超平面
3、单个汽车检测
import cv2
import numpy as np
from os.path import join
datapath = "E:/dl4cv/datesets/CarData/TrainImages/"
def path(cls,i):
return "%s/%s%d.pgm" % (datapath,cls,i+1)
pos, neg = "pos-", "neg-"
#创建sift特征提取
detect = cv2.xfeatures2d.SIFT_create()
extract = cv2.xfeatures2d.SIFT_create()
flann_params = dict(algorithm = 1, trees = 5)
matcher = cv2.FlannBasedMatcher(flann_params, {})
bow_kmeans_trainer = cv2.BOWKMeansTrainer(40)
#创建词袋模型
extract_bow = cv2.BOWImgDescriptorExtractor(extract, matcher)
def extract_sift(fn):
im = cv2.imread(fn,0)
return extract.compute(im, detect.detect(im))[1]
for i in range(8):
bow_kmeans_trainer.add(extract_sift(path(pos,i)))
bow_kmeans_trainer.add(extract_sift(path(neg,i)))
voc = bow_kmeans_trainer.cluster()
extract_bow.setVocabulary( voc )
def bow_features(fn):
im = cv2.imread(fn,0)
return extract_bow.compute(im, detect.detect(im))
traindata, trainlabels = [],[]
for i in range(20):
traindata.extend(bow_features(path(pos, i))); trainlabels.append(1)
traindata.extend(bow_features(path(neg, i))); trainlabels.append(-1)
#创建svm模型
svm = cv2.ml.SVM_create()
svm.train(np.array(traindata), cv2.ml.ROW_SAMPLE, np.array(trainlabels))
def predict(fn):
f = bow_features(fn);
p = svm.predict(f)
print(fn, " ", p[1][0][0])
return p
#测试两图
car, notcar = "E:/sandbox/car3.jpg", "E:/sandbox/car4.jpg"
car_img = cv2.imread(car)
notcar_img = cv2.imread(notcar)
car_predict = predict(car)
not_car_predict = predict(notcar)
font = cv2.FONT_HERSHEY_SIMPLEX
if (car_predict[1][0][0] == 1.0):
cv2.putText(car_img,'Car Detected',(10,30), font, 1,(0,255,0),2,cv2.LINE_AA)
if (not_car_predict[1][0][0] == -1.0):
cv2.putText(notcar_img,'Car Not Detected',(10,30), font, 1,(0,0, 255),2,cv2.LINE_AA)
cv2.imshow('BOW + SVM Success', car_img)
cv2.imshow('BOW + SVM Failure', notcar_img)
cv2.waitKey(0)
cv2.destroyAllWindows()

其结果,仅仅是检查出图片中是否有汽车。比较关键的部分
flann_params = dict(algorithm = 1, trees = 5)
matcher = cv2.FlannBasedMatcher(flann_params, {})
创建基于flann的匹配器
bow_kmeans_trainer = cv2.BOWKMeansTrainer(40)
创建bow训练器
def extract_sift(fn):
im = cv2.imread(fn,0)
return extract.compute(im, detect.detect(im))[1]
以灰度方式读取图像,提取sift,并返回结果
for i in range(8):
bow_kmeans_trainer.add(extract_sift(path(pos,i)))
bow_kmeans_trainer.add(extract_sift(path(neg,i)))
为模型输入正负样本
voc = bow_kmeans_trainer.cluster()
extract_bow.setVocabulary( voc )
cluster函数,执行k-means分类,并且返回词汇。进一步制定extract_bow提取描述符
def bow_features(fn):
im = cv2.imread(fn,0)
return extract_bow.compute(im, detect.detect(im))
返回bow的描述符提取器计算得到的描述符
traindata, trainlabels = [],[]
for i in range(20):
traindata.extend(bow_features(path(pos, i))); trainlabels.append(1)
traindata.extend(bow_features(path(neg, i))); trainlabels.append(-1)
创建2个数组,生成svm模型所需正负样本标签
svm = cv2.ml.SVM_create()
svm.train(np.array(traindata), cv2.ml.ROW_SAMPLE, np.array(trainlabels))
创建并训练一个svm模型
def predict(fn):
f = bow_features(fn);
p = svm.predict(f)
print(fn, " ", p[1][0][0])
return p
返回预测的结果。在没有经过精确测算的情况下sift+bow+svm的组合表现良好,我找到的几幅图像都能够正确识别。这个时候,必须用更科学的数据集来进行测试。
3、通过交叉检验
import cv2
import numpy as np
from os.path import join
import numpy as np
import os
import math
#在carData建立svm模型并且k_fold测试,ratio=1表示全部数据用于测试
RATIO = 0.2
datapath = "E:/dl4cv/datesets/CarData/TrainImages/"
def path(cls,i):
return "%s/%s%d.pgm" % (datapath,cls,i+1)
#根据Ratio获得训练和测试数据集的图片地址和标签
def get_files(file_dir, ratio):
'''
Args:
file_dir: file directory
Returns:
list of images and labels
'''
pos = []
label_pos = []
neg = []
label_neg = []
for file in os.listdir(file_dir):
name = file.split(sep='-')
if name[0]=='pos':
pos.append(file_dir + file)
label_pos.append(1)
else:
neg.append(file_dir + file)
label_neg.append(-1)
print('数据集中有 %d pos
以及 %d neg ' %(len(pos), len(neg)))
#图片list和标签list
#hstack 水平(按列顺序)把数组给堆叠起来
image_list = np.hstack((pos, neg))
label_list = np.hstack((label_pos, label_neg))
temp = np.array([image_list, label_list])
temp = temp.transpose()
#乱序的目的是为了让正样本和负样本混在一起,这样直接取其中百分之多少就可以来用了
np.random.shuffle(temp)
all_image_list = temp[:, 0]
all_label_list = temp[:, 1]
n_sample = len(all_label_list)
#根据比率,确定训练和测试数量
n_val = math.ceil(n_sample*ratio) # number of validation samples
n_train = n_sample - n_val # number of trainning samples
tra_images = []
val_images = []
#按照0-n_train为tra_images,后面位val_images的方式来排序
tra_images = all_image_list[:n_train]
tra_labels = all_label_list[:n_train]
tra_labels = [int(float(i)) for i in tra_labels]
val_images = all_image_list[n_train:]
val_labels = all_label_list[n_train:]
val_labels = [int(float(i)) for i in val_labels]
return tra_images,tra_labels,val_images,val_labels
pos, neg = "pos-", "neg-"
#创建sift特征提取
detect = cv2.xfeatures2d.SIFT_create()
extract = cv2.xfeatures2d.SIFT_create()
#创建基于flann的匹配器
flann_params = dict(algorithm = 1, trees = 5)
matcher = cv2.FlannBasedMatcher(flann_params, {})
#创建bow训练器
bow_kmeans_trainer = cv2.BOWKMeansTrainer(40)
extract_bow = cv2.BOWImgDescriptorExtractor(extract, matcher)
#以灰度方式读取图像,提取sift,并返回结果
def extract_sift(fn):
im = cv2.imread(fn,0)
return extract.compute(im, detect.detect(im))[1]
#为模型输入正负样本
for i in range(8):
bow_kmeans_trainer.add(extract_sift(path(pos,i)))
bow_kmeans_trainer.add(extract_sift(path(neg,i)))
#cluster函数,执行k-means分类,并且返回词汇。进一步制定extract_bow提取描述符
voc = bow_kmeans_trainer.cluster()
extract_bow.setVocabulary( voc )
#返回bow的描述符提取器计算得到的描述符
def bow_features(fn):
im = cv2.imread(fn,0)
return extract_bow.compute(im, detect.detect(im))
#获得数据集
train_images, train_labels, val_images, val_labels = get_files(datapath, RATIO)
traindata, trainlabels = [],[]
#20这个参数并不是越大越好
#for i in range(400):
# traindata.extend(bow_features(path(pos, i))); trainlabels.append(1)
# traindata.extend(bow_features(path(neg, i))); trainlabels.append(-1)
#当给出较大训练数据集的时候,预测是明显错误的
for i in range(len(train_images)):
traindata.extend(bow_features(train_images[i]))
trainlabels.append(train_labels[i])
#创建并训练一个svm模型
#初步认为,加大数据集并没有提高svm的识别率
svm = cv2.ml.SVM_create()
svm.train(np.array(traindata), cv2.ml.ROW_SAMPLE, np.array(trainlabels))
#返回预测的结果
def predict(fn):
f = bow_features(fn);
p = svm.predict(f)
print(fn, " ", p[1][0][0])
return p
#在测试集上进行测试
result = []
for i in range(len(val_images)):
f = bow_features(val_images[i]);
p = svm.predict(f)
result.append(p[1][0][0])
np_val_labels = np.array(val_labels)[:,np.newaxis]
np_result = np.array(result)[:,np.newaxis]
matches = np_result == np_val_labels
correct = np.count_nonzero(matches)
accuracy = correct*100.0/len(result)
print(accuracy)
#测试两图
car, notcar = "E:/sandbox/car3.jpg", "E:/sandbox/car4.jpg"
car_img = cv2.imread(car)
notcar_img = cv2.imread(notcar)
car_predict = predict(car)
not_car_predict = predict(notcar)
font = cv2.FONT_HERSHEY_SIMPLEX
if (car_predict[1][0][0] == 1.0):
cv2.putText(car_img,'Car Detected',(10,30), font, 1,(0,255,0),2,cv2.LINE_AA)
if (not_car_predict[1][0][0] == -1.0):
cv2.putText(notcar_img,'Car Not Detected',(10,30), font, 1,(0,0, 255),2,cv2.LINE_AA)
cv2.imshow('BOW + SVM Success', car_img)
cv2.imshow('BOW + SVM Failure', notcar_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
对数据集进行交叉检验,在20/80的比率下,成功识别率为
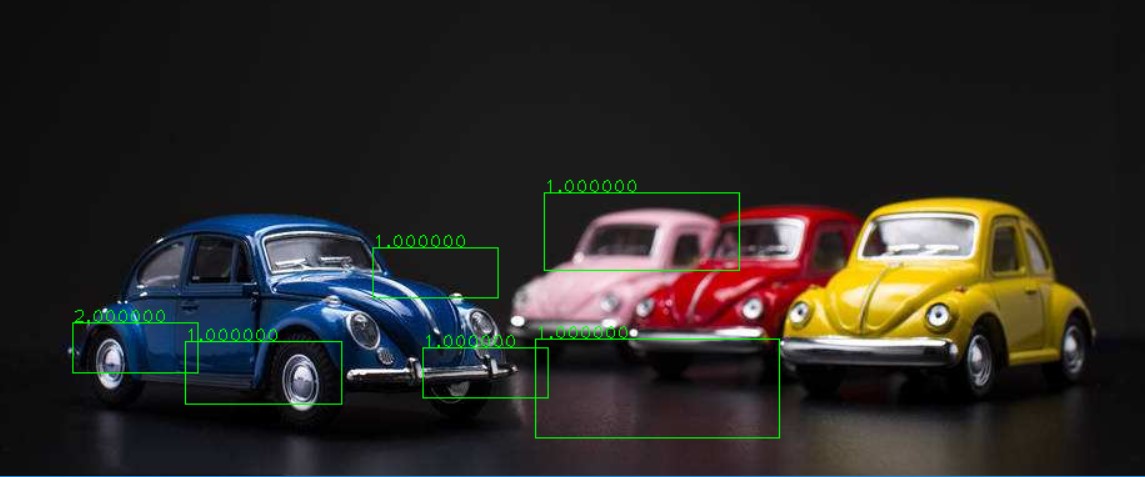
4、多个汽车和滑动窗口检测
该应用的执行过程如下:
1、获取数据集
2、创建BOW训练器并且获得视觉词汇
3、采用词汇训练svm
4、尝试对测试图像的金字塔采用滑动窗口进行检测
5、对重叠的矩形采用“非最大抑制”,进行过滤
6、得到结果。
各个函数如下
def resize(img, scaleFactor):
return cv2.resize(img, (int(img.shape[1] * (1 / scaleFactor)), int(img.shape[0] * (1 / scaleFactor))), interpolation=cv2.INTER_AREA)
大小变化
def pyramid(image, scale=1.5, minSize=(200, 80)):
yield image
while True:
image = resize(image, scale)
if image.shape[0] < minSize[1] or image.shape[1] < minSize[0]:
break
yield image
采用yield方法,获得金字塔层
def sliding_window(image, step, window_size):
for y in xrange(0, image.shape[0], step):
for x in xrange(0, image.shape[1], step):
yield (x, y, image[y:y + window_size[1], x:x + window_size[0]])
同样采用yield的方法,获得滑动窗口数据
# import the necessary packages
import numpy as np
# Malisiewicz et al.
# Python port by Adrian Rosebrock
def non_max_suppression_fast(boxes, overlapThresh):
# if there are no boxes, return an empty list
if len(boxes) == 0:
return []
# if the bounding boxes integers, convert them to floats --
# this is important since we'll be doing a bunch of divisions
if boxes.dtype.kind == "i":
boxes = boxes.astype("float")
# initialize the list of picked indexes
pick = []
# grab the coordinates of the bounding boxes
x1 = boxes[:,0]
y1 = boxes[:,1]
x2 = boxes[:,2]
y2 = boxes[:,3]
scores = boxes[:,4]
# compute the area of the bounding boxes and sort the bounding
# boxes by the score/probability of the bounding box
area = (x2 - x1 + 1) * (y2 - y1 + 1)
idxs = np.argsort(scores)[::-1]
# keep looping while some indexes still remain in the indexes
# list
while len(idxs) > 0:
# grab the last index in the indexes list and add the
# index value to the list of picked indexes
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
# find the largest (x, y) coordinates for the start of
# the bounding box and the smallest (x, y) coordinates
# for the end of the bounding box
xx1 = np.maximum(x1[i], x1[idxs[:last]])
yy1 = np.maximum(y1[i], y1[idxs[:last]])
xx2 = np.minimum(x2[i], x2[idxs[:last]])
yy2 = np.minimum(y2[i], y2[idxs[:last]])
# compute the width and height of the bounding box
w = np.maximum(0, xx2 - xx1 + 1)
h = np.maximum(0, yy2 - yy1 + 1)
# compute the ratio of overlap
overlap = (w * h) / area[idxs[:last]]
# delete all indexes from the index list that have
idxs = np.delete(idxs, np.concatenate(([last],
np.where(overlap > overlapThresh)[0])))
# return only the bounding boxes that were picked using the
# integer data type
return boxes[pick].astype("int")
这个函数得到系列举行并且对这些矩形按照评分进行排序。从评分醉倒的矩形开始消除所有重叠超过一定阈值的矩形。
datapath = "E:/py4cv/CarData/TrainImages"
SAMPLES = 400
def path(cls,i):
return "%s/%s%d.pgm" % (datapath,cls,i+1)
获得系列路径下地址
def get_flann_matcher():
flann_params = dict(algorithm = 1, trees = 5)
return cv2.FlannBasedMatcher(flann_params, {})
获得flann的matcher
def get_bow_extractor(extract, match):
return cv2.BOWImgDescriptorExtractor(extract, match)
获得bow的image描述
def get_extract_detect():
return cv2.xfeatures2d.SIFT_create(), cv2.xfeatures2d.SIFT_create()
获得sift描述
def extract_sift(fn, extractor, detector):
im = cv2.imread(fn,0)
return extractor.compute(im, detector.detect(im))[1]
及其计算值
def bow_features(img, extractor_bow, detector):
return extractor_bow.compute(img, detector.detect(img))
获得bow features
import cv2
import numpy as np
datapath = "E:/py4cv/CarData/TrainImages"
SAMPLES = 400
def path(cls,i):
return "%s/%s%d.pgm" % (datapath,cls,i+1)
def get_flann_matcher():
flann_params = dict(algorithm = 1, trees = 5)
return cv2.FlannBasedMatcher(flann_params, {})
def get_bow_extractor(extract, match):
return cv2.BOWImgDescriptorExtractor(extract, match)
def get_extract_detect():
return cv2.xfeatures2d.SIFT_create(), cv2.xfeatures2d.SIFT_create()
def extract_sift(fn, extractor, detector):
im = cv2.imread(fn,0)
return extractor.compute(im, detector.detect(im))[1]
def bow_features(img, extractor_bow, detector):
return extractor_bow.compute(img, detector.detect(img))
def car_detector():
pos, neg = "pos-", "neg-"
#获得两个sift的检测器
detect, extract = get_extract_detect()
#获得flann的描述符
matcher = get_flann_matcher()
#创建bow描述检测器
print("building BOWKMeansTrainer...")
bow_kmeans_trainer = cv2.BOWKMeansTrainer(12)
extract_bow = cv2.BOWImgDescriptorExtractor(extract, matcher)
#首先构建bow词典
print("adding features to trainer...")
for i in range(SAMPLES):
print i
bow_kmeans_trainer.add(extract_sift(path(pos,i), extract, detect))
#注意,这里地方没有添加负样本
#bow_kmeans_trainer.add(extract_sift(path(neg,i), extract, detect))
#聚类并返回词汇
vocabulary = bow_kmeans_trainer.cluster()
extract_bow.setVocabulary(vocabulary)
#基于词汇进行svm训练
traindata, trainlabels = [],[]
print "adding to train data"
for i in range(SAMPLES):
print i
#1为有数据,-1为没有数据
traindata.extend(bow_features(cv2.imread(path(pos, i), 0), extract_bow, detect))
trainlabels.append(1)
traindata.extend(bow_features(cv2.imread(path(neg, i), 0), extract_bow, detect))
trainlabels.append(-1)
svm = cv2.ml.SVM_create()
svm.setType(cv2.ml.SVM_C_SVC)
svm.setGamma(1)
svm.setC(35)#越大,误判的可能性越小;越低,则可能导致过拟合
svm.setKernel(cv2.ml.SVM_RBF)#svm_linear 超平面 两类;svm_rbf高斯核,多类
svm.train(np.array(traindata), cv2.ml.ROW_SAMPLE, np.array(trainlabels))
return svm, extract_bow
车辆滑动窗口探测
import cv2
import numpy as np
from car_detector.detector import car_detector, bow_features
from car_detector.pyramid import pyramid
from car_detector.non_maximum import non_max_suppression_fast as nms
from car_detector.sliding_window import sliding_window
import urllib
def in_range(number, test, thresh=0.2):
return abs(number - test) < thresh
img_path = "E:/sandbox/car1.png"
#获得svm模型训练结果。注意在训练过程中没有使用滑动窗口
svm, extractor = car_detector()
detect = cv2.xfeatures2d.SIFT_create()
w, h = 100, 40
img = cv2.imread(img_path)
rectangles = []
counter = 1
scaleFactor = 1.25
scale = 1
font = cv2.FONT_HERSHEY_PLAIN
for resized in pyramid(img, scaleFactor):
scale = float(img.shape[1]) / float(resized.shape[1])
for (x, y, roi) in sliding_window(resized, 20, (100, 40)):#窗口大小100*40
if roi.shape[1] != w or roi.shape[0] != h:
continue
try:
bf = bow_features(roi, extractor, detect)
_, result = svm.predict(bf)
a, res = svm.predict(bf, flags=cv2.ml.STAT_MODEL_RAW_OUTPUT | cv2.ml.STAT_MODEL_UPDATE_MODEL)
print (("Class: %d, Score: %f, a: %s ") % (result[0][0], res[0][0], res))
score = res[0][0]
if result[0][0] == 1:
if score < -1.0:
rx, ry, rx2, ry2 = int(x * scale), int(y * scale), int((x+w) * scale), int((y+h) * scale)
rectangles.append([rx, ry, rx2, ry2, abs(score)])
except:
pass
counter += 1
windows = np.array(rectangles)
#调用非最大值抑制
boxes = nms(windows, 0.25)
for (x, y, x2, y2, score) in boxes:
print (x, y, x2, y2, score)
cv2.rectangle(img, (int(x),int(y)),(int(x2), int(y2)),(0, 255, 0), 1)
cv2.putText(img, "%f" % score, (int(x),int(y)), font, 1, (0, 255, 0))
cv2.imshow("img", img)
cv2.waitKey(0)
小结和启示:
1、python作为这个时代的语言,的确是非常适合机器学习和图像处理应用层算法的编写的;
2、svm作为一种已经发展很长世间的算法,90左右应该已经是它的瓶颈,即使存在sift+bow的特征提取方式;
3、再想提高,尽快进入mlp和cnn乃至dl的境地;
4、挖掘发现机器学习的现实应用场景,是除了掌握机器学习方法以外,最难也是最有意义的一件事情。
5、今日是学习时间机器学习的最好时间,时不我们待。
感谢阅读至此,希望有所帮助。