安装Autorace软件包
以下说明介绍了如何安装软件包和校准摄像机。
在Remote PC和SBC上都安装AutoRace软件包。
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3_autorace_2020.git cd ~/catkin_ws && catkin_make
在Remote PC和SBC上都安装其他依赖包。
sudo apt-get install ros-kinetic-image-transport ros-kinetic-cv-bridge ros-kinetic-vision-opencv python-opencv libopencv-dev ros-kinetic-image-proc
在SBC上校准相机
校准相机对于自动驾驶非常重要。下面介绍如何简单地逐步校准摄像机。
- 相机成像校准
在Remote PC上启动roscore 。
roscore
- SBC上开启相机。
roslaunch turtlebot3_autorace_traffic_light_camera turtlebot3_autorace_camera_pi.launch
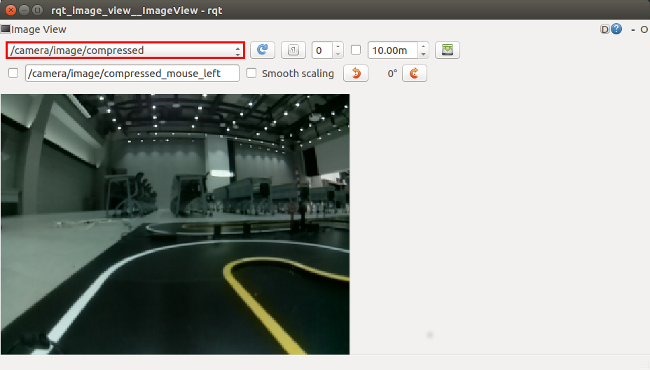
- 在Remote PC上执行rqt_image_view。
rqt_image_view
- 在复选框上选择/camera/image/compressed(或/camera/image/)主题。
在Remote PC上执行rqt_reconfigure
rosrun rqt_reconfigure rqt_reconfigure
单击camera,然后修改参数值以查看来自相机的清晰图像。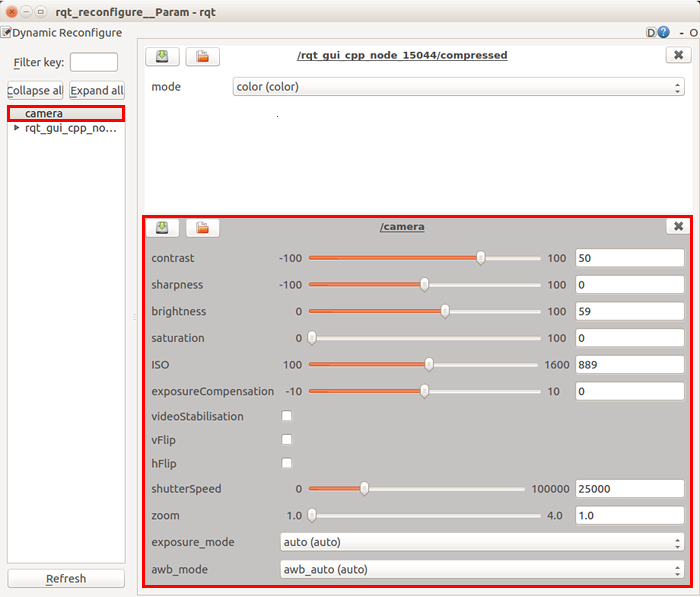
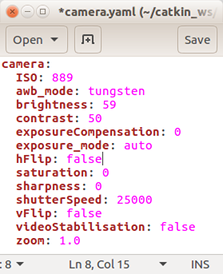
打开位于文件turtlebot3autorace[Autorace Misson]_camera/calibration/camera_calibration文件夹内的camera.yaml文件。
将修改后的值写入文件。