[TurtleBot3] 在TurtleBot3上打开一个终端。
启动您的TurtleBot3模型,包括robot_state_publisher和的节点turtlebot3_node。
export TURTLEBOT3_MODEL=burger ros2 launch turtlebot3_bringup robot.launch.py
检查主题和服务列表
ros2 topic list
ros2 service list
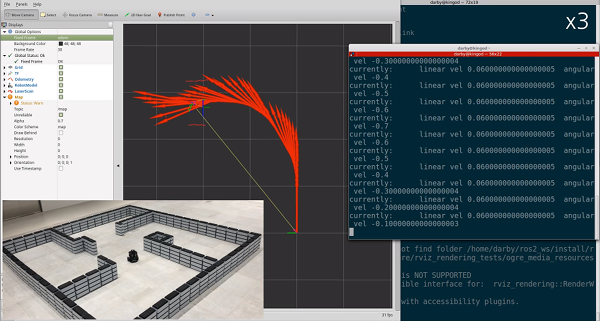
在Rviz2上加载TurtleBot3
启动机器人状态发布器,然后在Remote PC上运行RViz 。
ros2 launch turtlebot3_bringup rviz2.launch.py