zoukankan
html css js c++ java
E-PUCK2机器人-硬件
概括
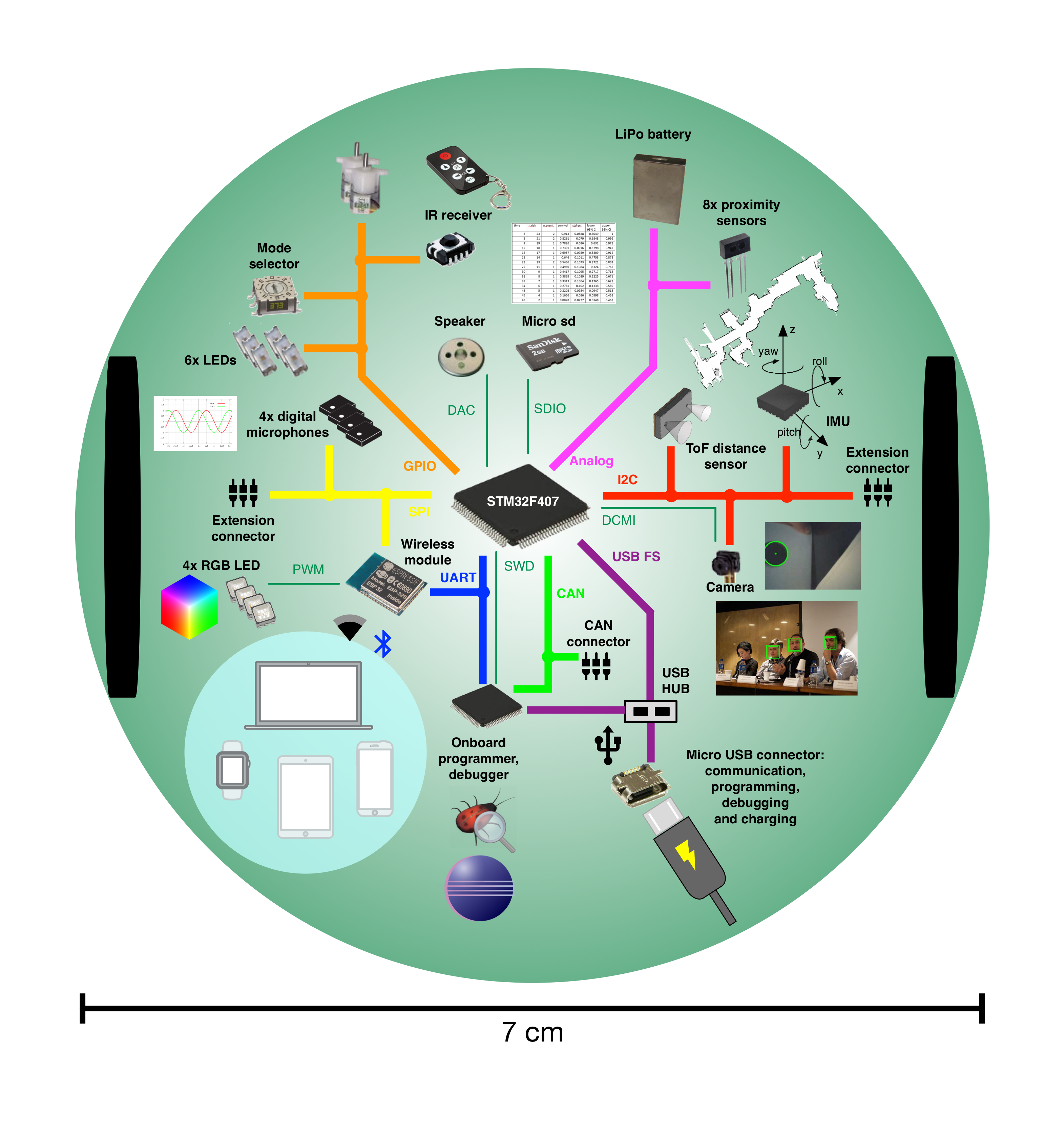
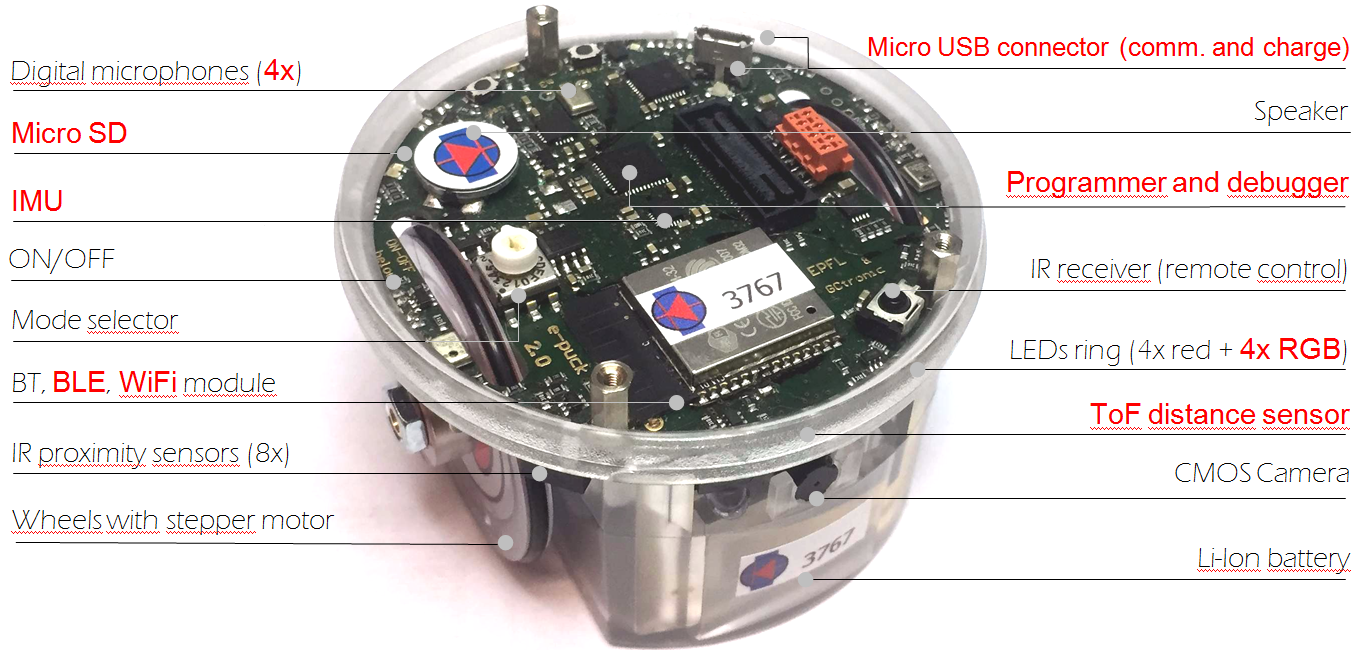
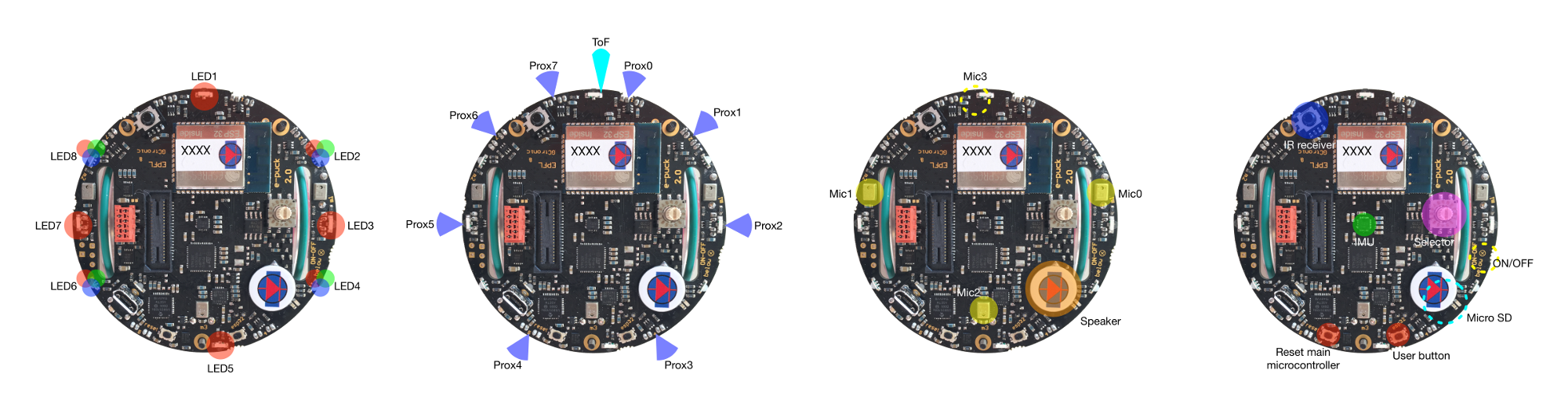
下图显示了e-puck2机器人提供的主要组件以及它们的实际放置位置:
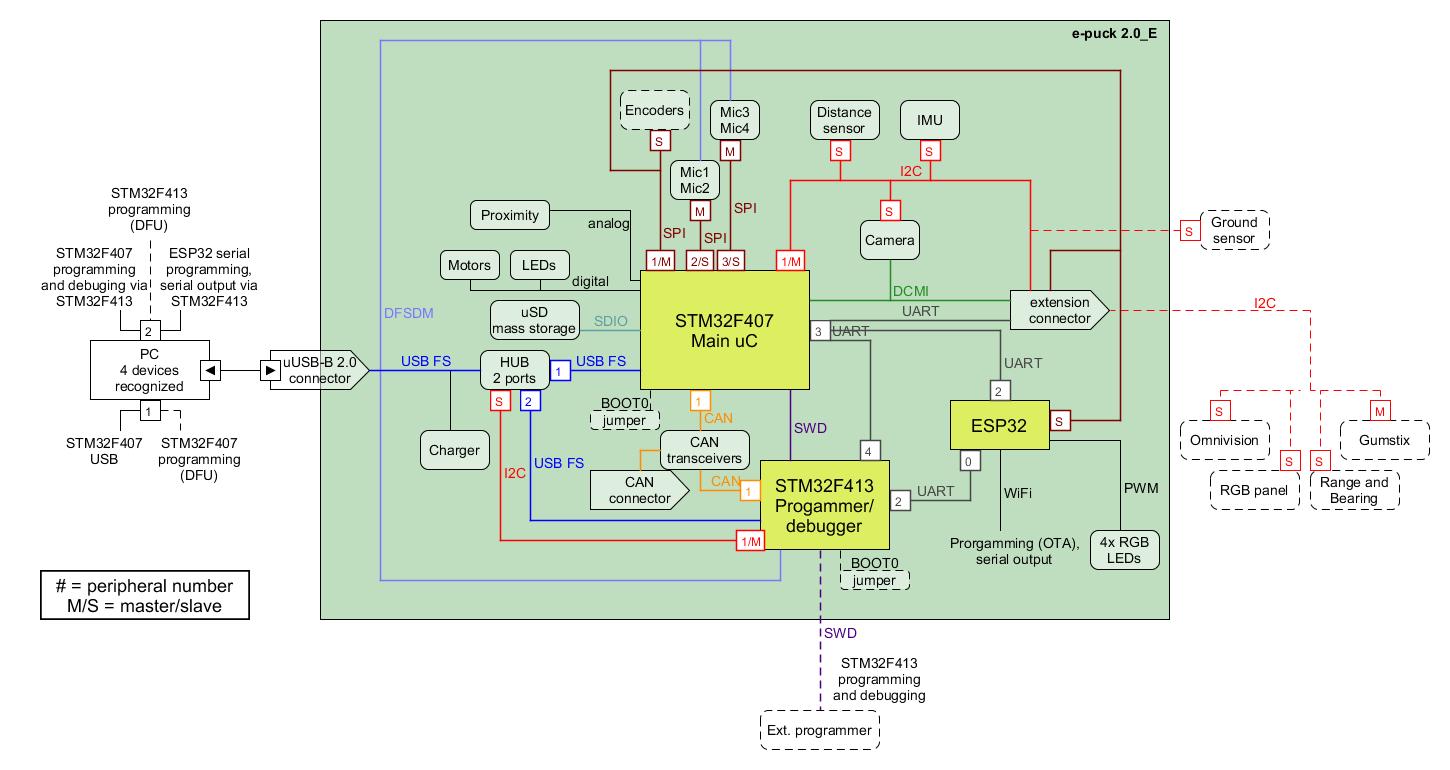
下面是整体通信架构:
作者:
kay
出处:
https://www.cnblogs.com/kay2018/
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。
如果文中有什么错误,欢迎指出。以免更多的人被误导。
查看全文
相关阅读:
笨蛋的厄运
模仿写了一个摸鱼应用解决原作者的问题
retain和copy还有assign的区别
分析与理解通知消息WM_NOTIFY
备忘录
数据结构C++模板实现之单向链表
服务器(VPS合租)
复制构造,赋值操作符,const重要性
Windows 注册表操作简介
窗口类封装之窗口对象消息处理的映射方法(1)
原文地址:https://www.cnblogs.com/kay2018/p/9583327.html
最新文章
备忘录 FL2440 开发板操作要点及注意事项
1x
MS SQL性能调优系列
## 面试官:说说你对react生命周期的理解
面试官:说说react的渲染过程
老大react说:schedule,我们今年的小目标是一个亿
来来来,手摸手写一个hook
记字节前端面试一道简单的算法题
面试官:useLayoutEffect和useEffect的区别
聊聊程序员35岁危机
热门文章
面试官:react中的setState是同步的还是异步的
面试官:你是怎样理解Fiber的
聊聊前端工程师如果做职业规划
用sql server 2005 CLR 实现一对多的数据插入(体演一下sql server 2005 )
转贴面向对象设计,ORM,NHIBERNATE
VS2005这几天不能调试了,断点无效啊
(转)C# 3.0 LINQ 的演变及其对 C# 设计的影响
我的iBatisNet入门
ObjectDataSource + Sql Server 2005 + GridView的自定义分页
理解Javascript_15_作用域分配与变量访问规则,再送个闭包
Copyright © 2011-2022 走看看