第一单元(介绍关于变换的数学知识)
L3V1:变换1:基本二维变换
模型坐标系,世界坐标系
1.缩放
Scale(规模,比例)
Sx表示在x方向上放大的倍数,Sy表示在y方向上放大的倍数,因此X坐标乘以Sx,Y坐标乘以Sy
缩放的你操作就是用x坐标和Y坐标分别乘以Sx和Sy的倒数。因此,如果放大了2倍,则其逆操作就是放大1/2倍,就是Sx和Sy的倒数
缩放矩阵是一个对角矩阵,将坐标乘以对应的缩放系数即可。

2.错切
Y坐标不发生变化,因此矩阵的第二行仍然是[0 1],乘起来仍然是y
x的值等于之前的x的值加上a乘以y坐标的值,x`=x+ay
这里为什么乘以a,因为这里是假设单位长度1,错切的变化量依赖于y坐标的值
错切矩阵为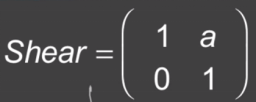 ,错切的逆矩阵就是把a变成-a,错切公式不变。
,错切的逆矩阵就是把a变成-a,错切公式不变。
3.旋转
该矩阵使得x方向和y方向上的变换叠加,相当于先在x方向上旋转再在y方向上旋转
二维的旋转变换,先在x轴上或先在y轴上可以交换顺序,但是三维不可以
因为数学表示在电脑上书写比较麻烦,故在纸上写下再拍照上传,得出旋转之后坐标的矩阵表示

课后测试题:
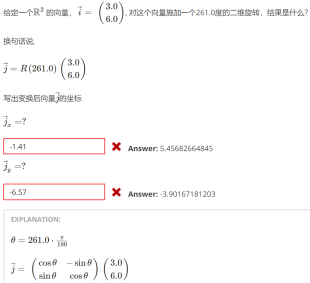
错误原因:在百度的时候没有加度,所以造成了错误,不用像答案把θ进行变换。
L3V2:变换1:组合变换
矩阵变换顺序不可交换!
组合变换矩阵的逆矩阵:最后一个变换的需要最先逆


对于旋转矩阵来说, R(A+B)=R(A)R(B),所以R(θ)=R(1)R(2)...R(179)R(180)=R(1+2+...+1 80)=R(((1+180)*180)/2)=R(16290),需要将旋转角再模360 (因为旋转x 度等价于旋转 x+360度)。 因此, 这里的旋转角就是 16290 mod 360=90 度
80)=R(((1+180)*180)/2)=R(16290),需要将旋转角再模360 (因为旋转x 度等价于旋转 x+360度)。 因此, 这里的旋转角就是 16290 mod 360=90 度
L3V3:变换1:三维旋转
旋转矩阵是正交的,R的转置乘以R等于单位矩阵E
三维绕哪个轴旋转,那个轴的坐标不变,即可得出结论(跟二维推导过程一样)
1>绕Z轴
2>绕X轴
3>绕Y轴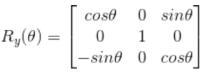 (注意这里的形式稍有不同!!)三个矩阵均正交,乘以对应的转置矩阵为单位矩阵
(注意这里的形式稍有不同!!)三个矩阵均正交,乘以对应的转置矩阵为单位矩阵
点乘和叉乘的区别:
1.
点乘是一个数,公式:a . b = |a| * |b| * cosθ
点乘又叫向量的内积、数量积,是一个向量和它在另一个向量上的投影的长度的乘积;
点乘反映着两个向量的“相似度”,两个向量越“相似”,它们的点乘越大。
2.
a*b = |a| * |b| * sinθ ,结果是一个向量,遵循右手法则
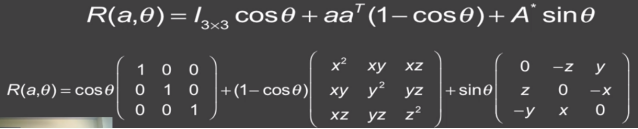
旋转可以写成一般矩阵的形式,即某个矩阵M乘以b,下边是一般轴角表示的旋转公式,推导过程比较复杂
罗德里格斯旋转公式:(记住)???这里不大懂
反向旋转轴实际上将绕 a⃗ 的逆时针旋转改变为绕a⃗ 的顺时针旋转。因此,绕−a⃗ 的逆时针旋转和绕a⃗ 的顺时针旋转等效。