http://blog.csdn.net/heyijia0327/article/details/43538695
官方也给出了单目的标定教程和双目视觉的标定教程。本教程基于usb_cam package 读取图像,然后使用官方例程进行标定。
0 安装usb_cam
1.使用usb_cam 读取图像
roscore
roslaunch usb_cam usb_cam-test.launch
这时笔记本的摄像头的灯会亮,并且弹出一个名为/camera/image_raw的窗口:

launch文件如下:
<launch>
<arg name="device" default="/dev/video0" />
<node name="usb_cam_node" pkg="usb_cam" type="usb_cam_node" output="screen">
<param name="video_device" value="$(arg device)" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="framerate" value="30" />
<param name="brightness" value="128" />
<param name="contrast" value="128" />
<param name="saturation " value="70" />某文件夹下有文件夹但看不见
</node>
</launch>
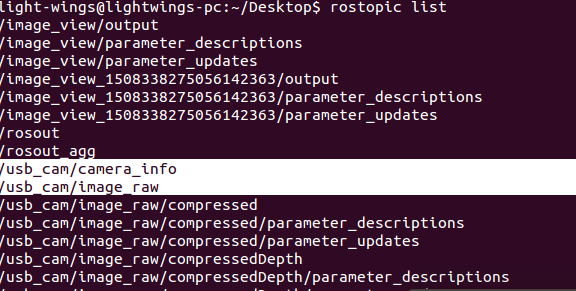
2.检查usb_cam package发布的消息:
rostopic list
看是否有如下消息,并记住名称
/usb_cam/camera_info /usb_cam/image_raw
3.启动标定程序:
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.03 image:=/usb_cam/image_raw camera:=/usb_cam
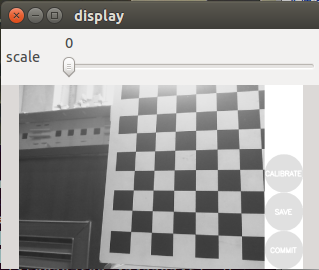
其中参数size 11x8 注意是字母x,他是棋盘内部角点个数,如下图所示。square为棋盘正方形边长,注意刚刚开始标定的时候,CALIBRATE按钮是灰色的。
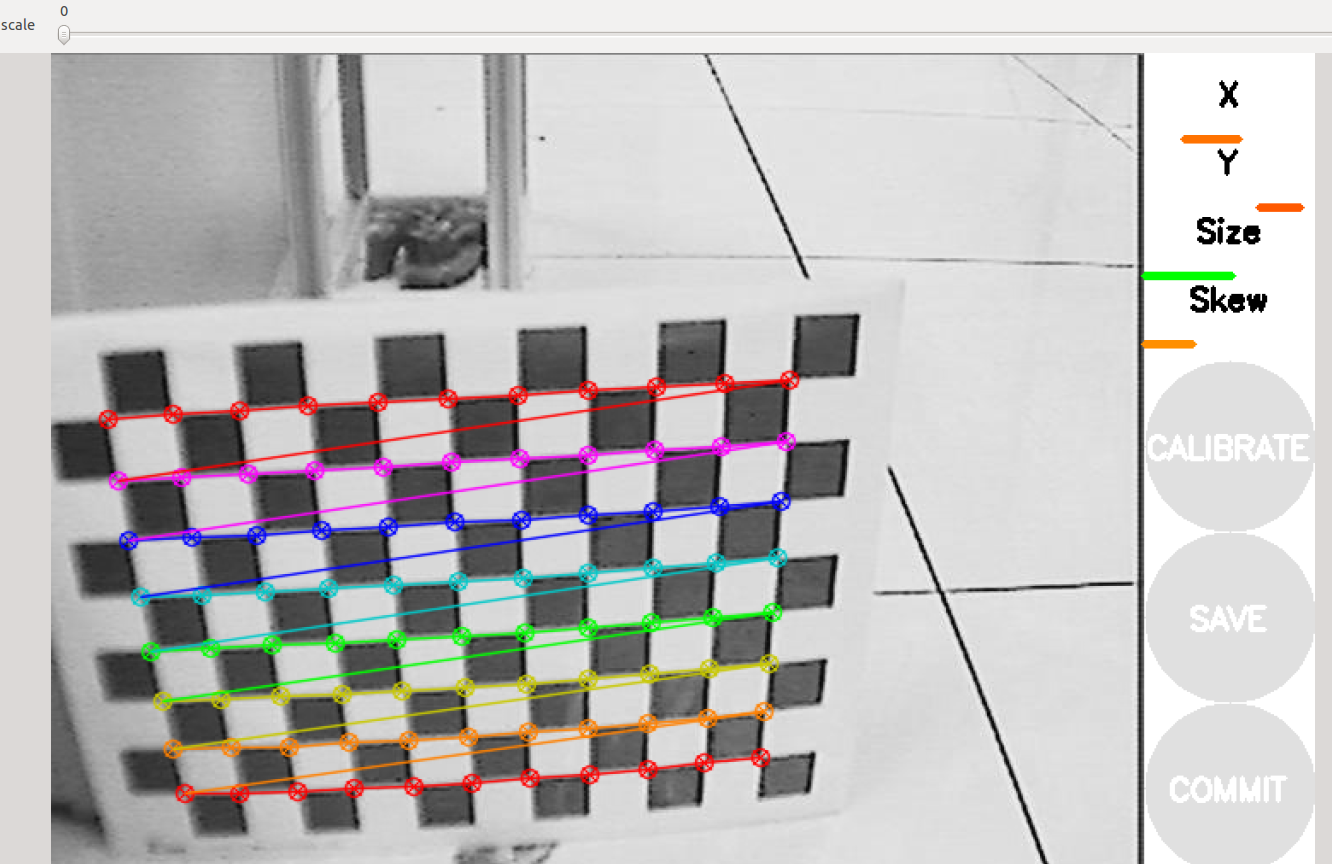
4.标定程序使用方法:
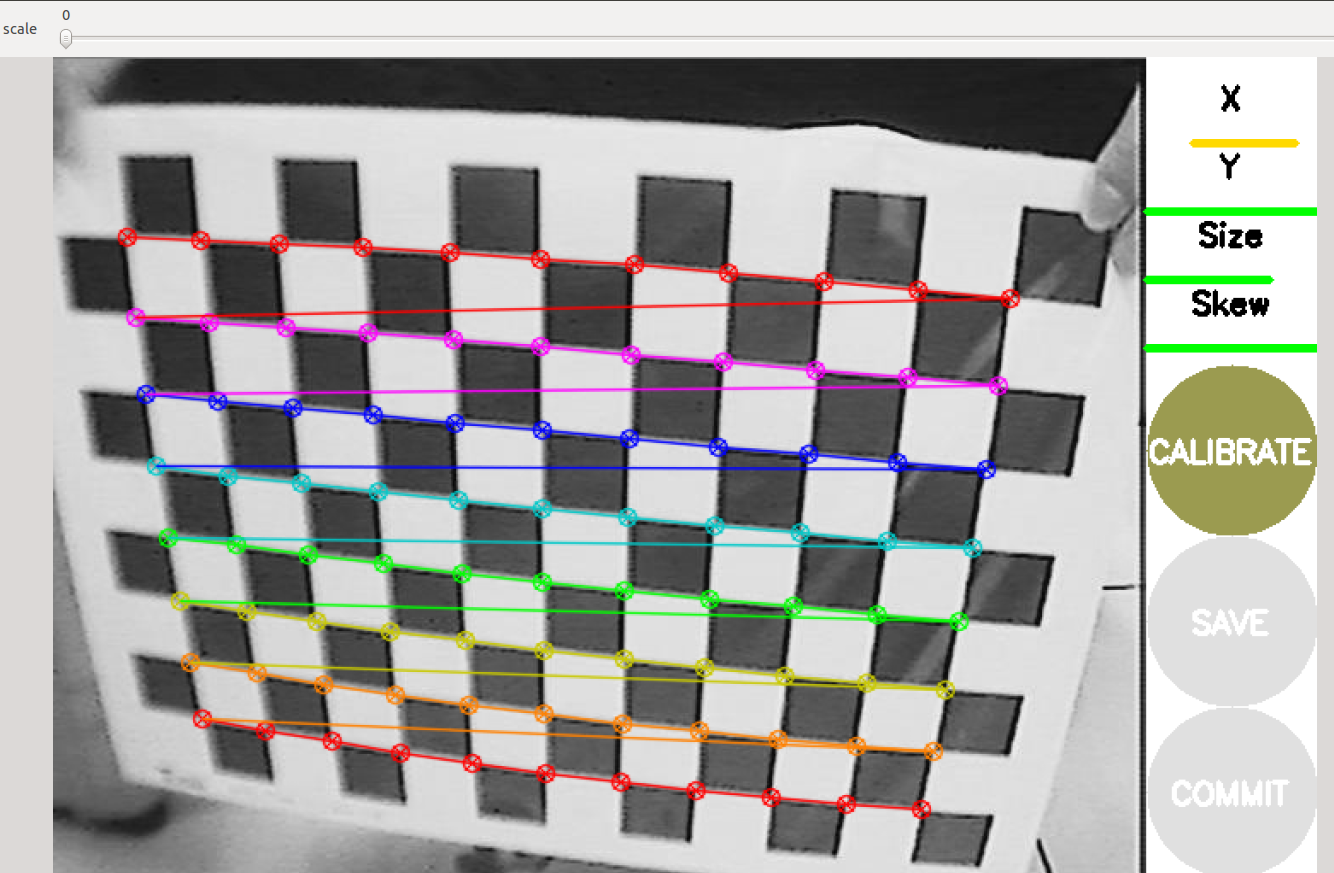
为了得到一个好的标定结果,应该使得标定板尽量出现在摄像头视野的各个位置里:
如标定板出现在视野中的左边,右边,上边和下边,标定板既有倾斜的,也有水平的,。
界面中的x:表示标定板在视野中的左右位置。
y:表示标定板在视野中的上下位置。
size:标定板在占视野的尺寸大小,也可以理解为标定板离摄像头的远近。
skew:标定板在视野中的倾斜位置。

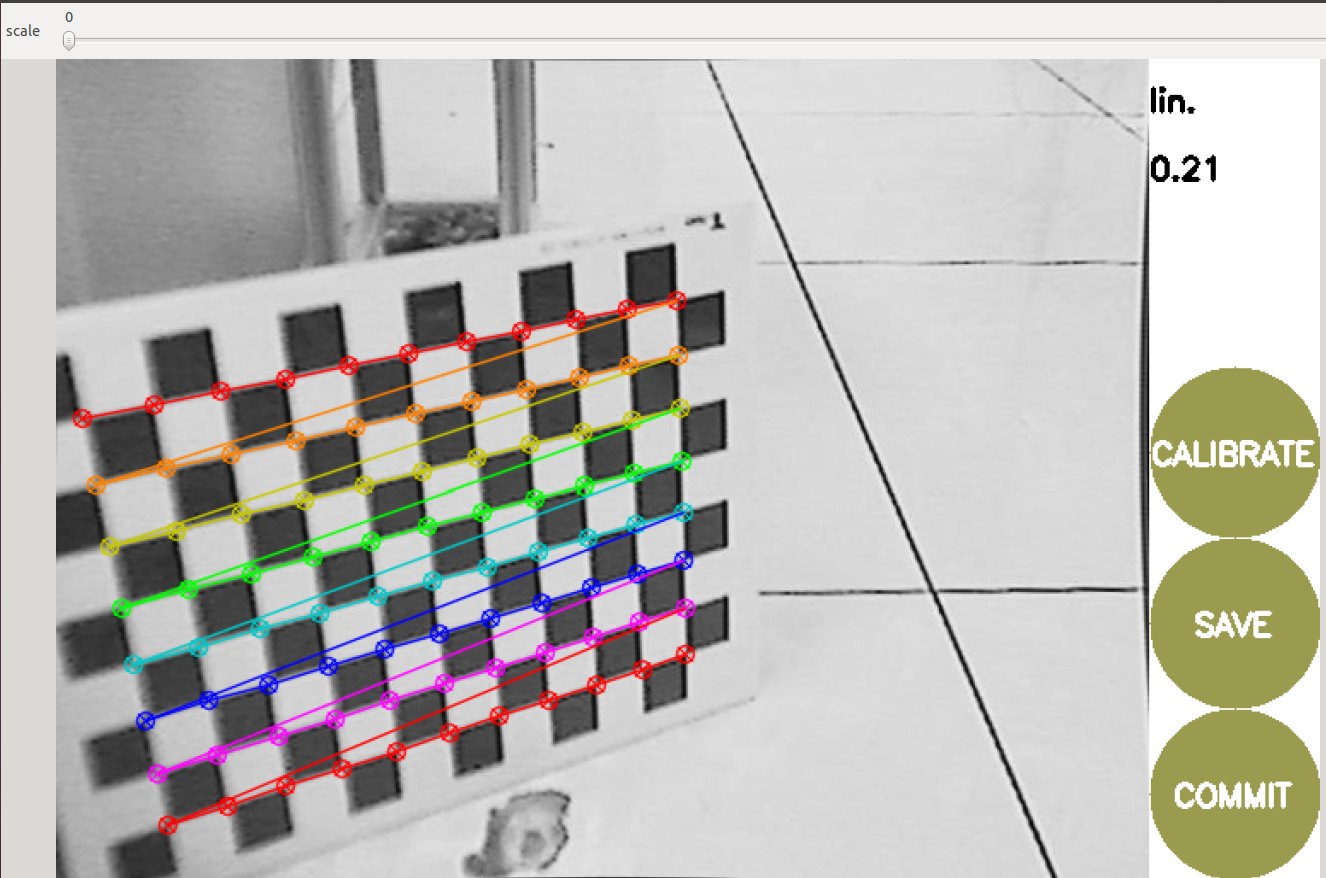
并还要有棋盘占住大部分视野的图片,如下图所示:
按着上述方式不断移动标定板,直到CALIBRATE按钮变亮,点击该按钮就会进行标定。标定过程将持续一两分钟,并且标定界面会变成灰色,无法进行操作,耐心等待即可。
标定完成以后,你将看到如下图所示的窗口,窗口中的图像为标定后的结果,纠正了畸变。
并且,摄像机的各个参数会出现在标定程序的终端窗口中,如下:
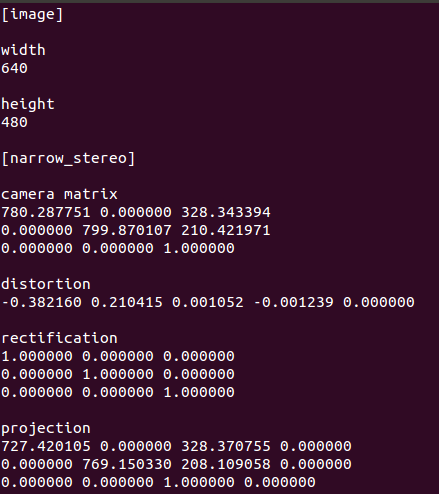
如果对标定结果满意,点击COMMIT按钮将结果保存到默认文件夹,在usb_cam窗口中可以看到如下信息,说明标定结果已经保存在相应文件夹下下次启动usb_cam节点时,会自动调用。

但是在light-wings目录下看不到.ros文件,只能用命令行模式复制出来
cd .ros/camera_info/ cp head_camera.yaml ../../
在light-wings目录下就能看到这个文件
标定后的文件格式需要转化成ORB-slam2的yaml文件才能被ros使用