Step1 : 运行内核
roscore
Step2 : 启动相机
cd catkin_ws/src/usb_cam/launch #进入usb_cam驱动的安装目录
roslaunch my_cam.launch
#roslaunch usb_cam usb_cam-test.launch
my_cam.launch文件
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
- 自己的路径,自己的launch文件名
Step3 : 运行orb_slam2
运行官方的
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
其中包含两个参数:
PATH_TO_VOCABULARY:视觉词典,一般可以直接使用catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt
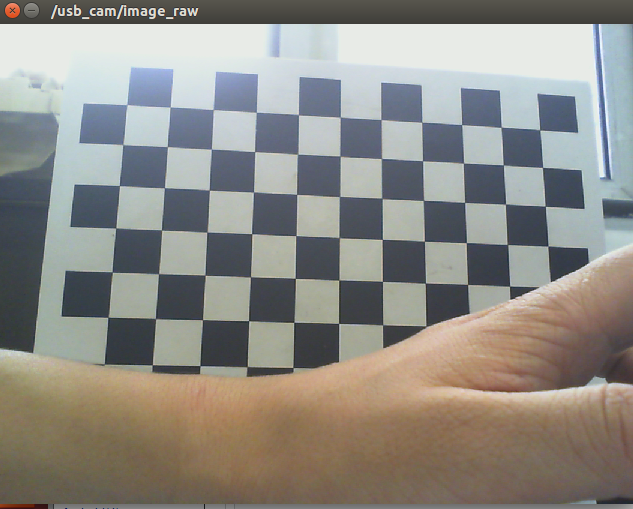
PATH_TO_SETTINGS_FILE:摄像头内参,可以使用路径catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/Asus.yaml,但需要将Asus.yaml中的参数改成自己使用摄像头标定后的参数,摄像头标定可以使用opencv或matlab工具箱。
运行自己的
#如果路径还没配置需要以下两行添加ROS环境
cd /home/hm/catkin_ws/src/ORB_SLAM2 #进入ORB_SLAM2的主目录 #source Examples/ROS/ORB_SLAM2/build/devel/setup.bash cd Examples/ROS/ rosrun ORB_SLAM2 Mono ../../Vocabulary/ORBvoc.txt ../../my_camera.yaml #自己的相机标定文件
my_camera.yaml #自己的相机标定文件
image_ 640 image_height: 480 camera_name: head_camera camera_matrix: rows: 3 cols: 3 data: [684.9063320280035, 0, 333.8552962590653, 0, 685.8214305739915, 258.3133970146105, 0, 0, 1] distortion_model: plumb_bob distortion_coefficients: rows: 1 cols: 5 data: [0.08540487526140211, -0.4947463318653558, 0.002070145615834643, 1.739354152579926e-05, 0] rectification_matrix: rows: 3 cols: 3 data: [1, 0, 0, 0, 1, 0, 0, 0, 1] projection_matrix: rows: 3 cols: 4 data: [679.8218383789062, 0, 334.2231118845648, 0, 0, 686.0590209960938, 258.4570282812347, 0, 0, 0, 1, 0]
修改话题
usb_cam默认话题 为usb_cam/image_raw
ros订阅的图像默认为 image/image_raw
进到catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src 打开ros_mono.cc
将subscribe的话题改为/usb_cam/image_raw,将话题接上
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);

rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
重新编译ROS的example
cd ~/catkin_ws/src/ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh重新编译工作空间
cd ~/catkin_ws
catkin_make
再来一次:
rosrun ORB_SLAM2 Mono PATH_TO_VOCABULARY PATH_TO_SETTINGS_FILE
问题:
权限问题: 一直提示无法打开参数文件
解决方法: 直接将两个参数文件,复制到同目录下,还不行需要分别给权限
sudo chmod 777 Asus.yaml sudo chmod 777 ORBvoc.txt

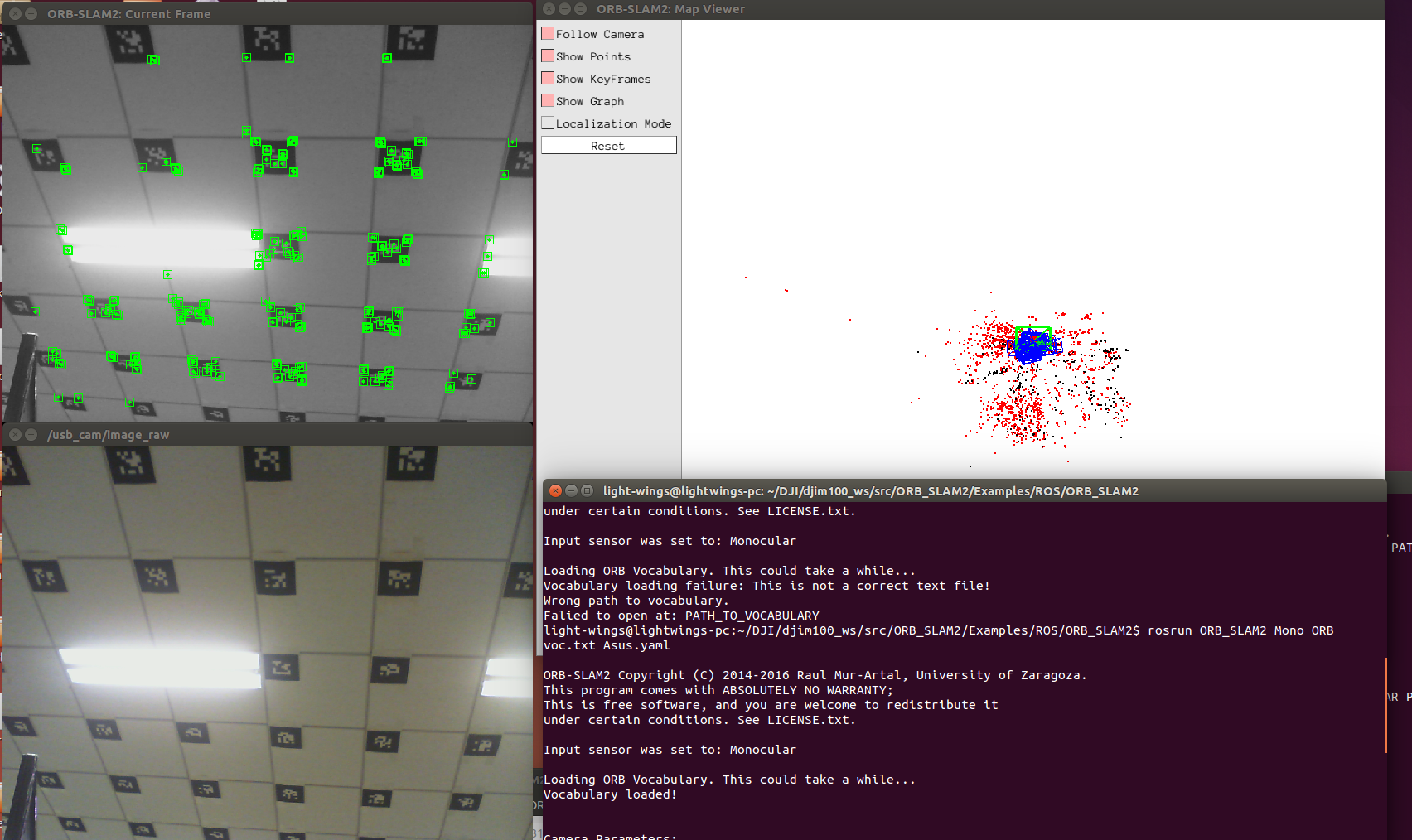
最后出图: