如图 ,将从水表表盘中分割出来的表盘数字(整体)进行切分
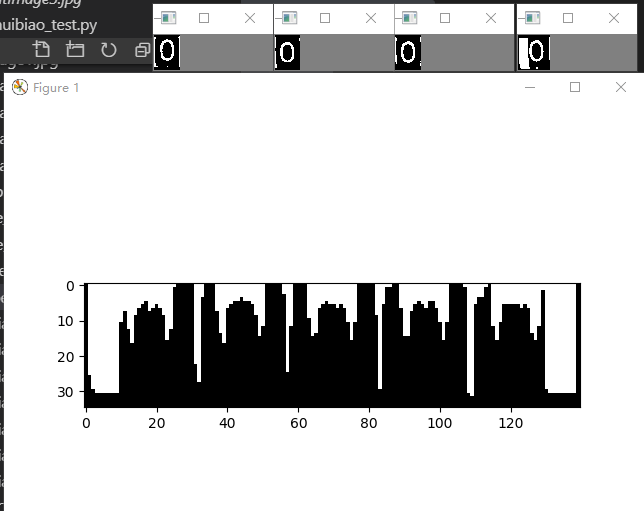
思路:基于图片的垂直方向上面的投影,利用垂直方向上白色像素点的低谷值 进行数字之间的分割缺点: 不能精确的得到低谷值,可能出现许多低谷值或者较少的低谷值,对不同的水表表盘的数字需要人工的更改参数
#将水表截取下来的数字进行 识别
from cv2 import cv2
import numpy as np
from matplotlib import pyplot as plt
from PIL import Image
#图片的自定义二值化
img = Image.open('cutImage3.jpg')
# 模式L”为灰色图像,它的每个像素用8个bit表示,0表示黑,255表示白,其他数字表示不同的灰度。
Img = img.convert('L')
# Img.save("graycutImage1.jpg")
# 自定义灰度界限,大于这个值为白色,小于这个值为黑色
threshold = 110
table = []
for i in range(256):
if i < threshold:
table.append(1)
else:
table.append(0)
# 图片二值化
photo = Img.point(table, '1')
photo.save("bcutImage3.jpg")
#扫描法分割字符 在图片像素的列上没有白色的像素点代表可以分割
#图片的垂直方向上面的投影
img=cv2.imread('bcutImage3.jpg') #读取图片,装换为可运算的数组
GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #将BGR图转为灰度图
ret,bimg=cv2.threshold(GrayImage,130,255,cv2.THRESH_BINARY)
ret,thresh1=cv2.threshold(GrayImage,130,255,cv2.THRESH_BINARY) #将图片进行二值化(130,255)之间的点均变为255(背景)
# print(thresh1[0,0])#250 输出[0,0]这个点的像素值 #返回值ret为阈值
# print(ret)#130
h,w=thresh1.shape #返回高和宽
print(h,w)#s输出高和宽
a = [0 for z in range(0, w)]
# print(a) #a = [0,0,0,0,0,0,0,0,0,0,...,0,0]初始化一个长度为w的数组,用于记录每一列的黑点个数
#记录每一列的波峰
for j in range(0,w): #遍历一列
for i in range(0,h): #遍历一行
if thresh1[i,j]==0: #如果改点为黑点
a[j]+=1 #该列的计数器加一计数
thresh1[i,j]=255 #记录完后将其变为白色
# print (j)
#
for j in range(0,w): #遍历每一列
for i in range((h-a[j]),h): #从该列应该变黑的最顶部的点开始向最底部涂黑
thresh1[i,j]=0 #涂黑
#此时的thresh1便是一张图像向垂直方向上投影的直方图
#如果要分割字符的话,其实并不需要把这张图给画出来,只需要的到a=[]即可得到想要的信息
cut_w=[]#用来存贮需要分割的x的坐标
for i in range(w-1):
if a[i+1]-a[i] >12 and i >20 and i <120:
cut_w.append(i)
print(cut_w)
img1=bimg[0:h,0:cut_w[0]]
cv2.imshow('hh1',img1)
img2=bimg[0:h,cut_w[0]:cut_w[1]]
cv2.imshow('hh2',img2)
img3=bimg[0:h,cut_w[1]:cut_w[2]]
cv2.imshow('hh3',img3)
img4=bimg[0:h,cut_w[2]:cut_w[3]]
cv2.imshow('hh4',img4)
# img2 =Image.open('0002.jpg')
# img2.convert('L')
# img_1 = np.array(img2)
plt.imshow(thresh1,cmap=plt.gray())
plt.show()
cv2.imshow('img',thresh1)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果如下:
进行修改以后:(有多少识别出来的数字都显示出来,并且保存在文本里面)
#将水表截取下来的数字进行 识别 from cv2 import cv2 import numpy as np from matplotlib import pyplot as plt from PIL import Image #图片的自定义二值化 img = Image.open('cutImage3.jpg') # 模式L”为灰色图像,它的每个像素用8个bit表示,0表示黑,255表示白,其他数字表示不同的灰度。 Img = img.convert('L') # Img.save("graycutImage1.jpg") # 自定义灰度界限,大于这个值为白色,小于这个值为黑色 threshold = 110 table = [] for i in range(256): if i < threshold: table.append(1) else: table.append(0) # 图片二值化 photo = Img.point(table, '1') photo.save("bcutImage3.jpg") #扫描法分割字符 在图片像素的列上没有白色的像素点代表可以分割 #图片的垂直方向上面的投影 img=cv2.imread('bcutImage3.jpg') #读取图片,装换为可运算的数组 cv2.imshow("hhh",img) GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #将BGR图转为灰度图 ret,bimg=cv2.threshold(GrayImage,130,255,cv2.THRESH_BINARY) ret,thresh1=cv2.threshold(GrayImage,130,255,cv2.THRESH_BINARY) #将图片进行二值化(130,255)之间的点均变为255(背景) # print(thresh1[0,0])#250 输出[0,0]这个点的像素值 #返回值ret为阈值 # print(ret)#130 h,w=thresh1.shape #返回高和宽 print(h,w)#s输出高和宽 a = [0 for z in range(0, w)] # print(a) #a = [0,0,0,0,0,0,0,0,0,0,...,0,0]初始化一个长度为w的数组,用于记录每一列的黑点个数 #记录每一列的波峰 for j in range(0,w): #遍历一列 for i in range(0,h): #遍历一行 if thresh1[i,j]==0: #如果改点为黑点 a[j]+=1 #该列的计数器加一计数 thresh1[i,j]=255 #记录完后将其变为白色 # print (j) # for j in range(0,w): #遍历每一列 for i in range((h-a[j]),h): #从该列应该变黑的最顶部的点开始向最底部涂黑 thresh1[i,j]=0 #涂黑 #此时的thresh1便是一张图像向垂直方向上投影的直方图 #如果要分割字符的话,其实并不需要把这张图给画出来,只需要的到a=[]即可得到想要的信息 cut_w=[]#用来存贮需要分割的x的坐标 for i in range(w-1): if a[i+1]-a[i] >6 and i >20 and i <w-20: cut_w.append(i) print(cut_w) num=len(cut_w) #记录一下一共有多少个分割出来的需要识别的数字 for i in range(len(cut_w)): if i==0: img=bimg[0:h,0:cut_w[i]] else: img=bimg[0:h,cut_w[i-1]:cut_w[i]] # cv2.imshow(("figure"+str(i)),img) cv2.imwrite("figure"+str(i)+".jpg",img)#保存成图片 plt.imshow(thresh1,cmap=plt.gray()) plt.show() # cv2.imshow('img',thresh1) cv2.waitKey(0) cv2.destroyAllWindows()