AROrientationTrackingConfiguration
使用后置摄像头并仅追踪设备方向的配置。
概述
所有的AR配置要在设备所在的现实世界和可建模内容的虚拟3D坐标空间之间建立对应关系。当你的应用程序将该内容与实时摄像机图像一起显示时,用户会体验到你的虚拟的内容是真实世界的一部分的幻象。
创建和维护空间之间的对应关系需要追踪设备的运动。* ARWorldTrackingConfiguration*类以三自由度(3DOF)追踪设备的运动:具体来说,三个旋转轴(滚动、俯仰和偏航)。
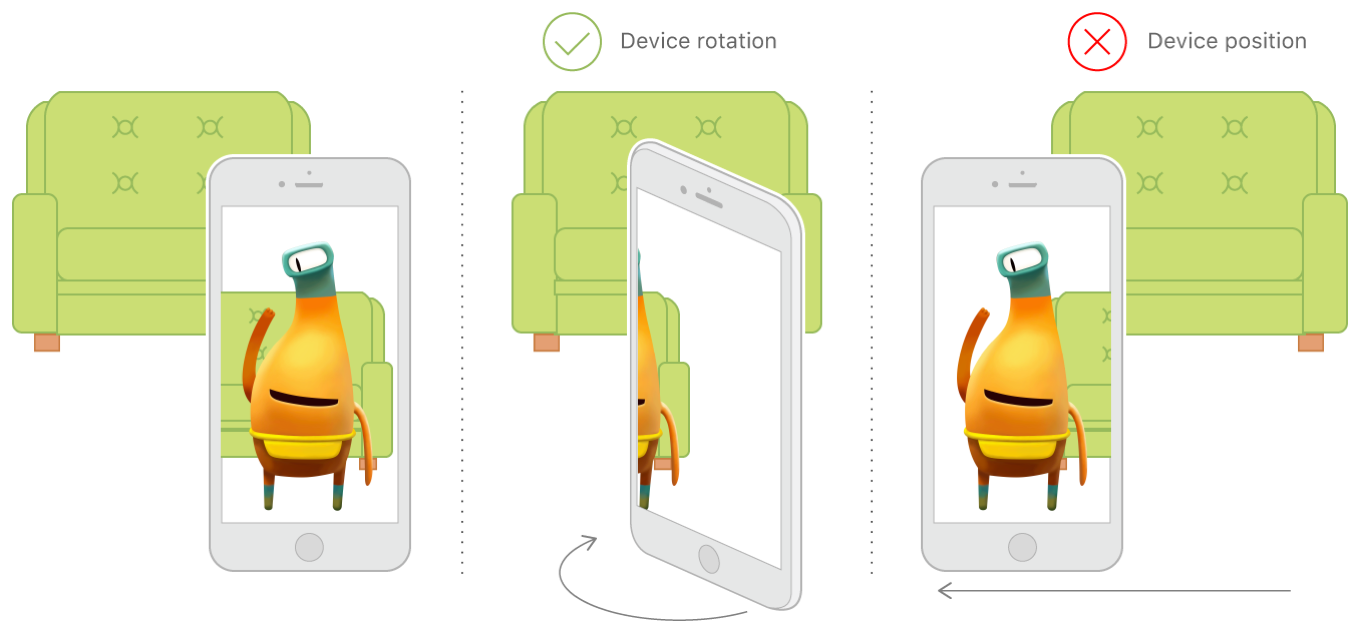
这个运动追踪只能创建有限的AR体验:即使用户将设备旋转到上面、下面或旁边,虚拟对象也看起来像是现实世界的一部分。然而,这种配置无法追踪设备的移动:大幅度地改变设备的位置不会造就AR错觉,导致虚拟内容看起来相对于现实世界在漂移。例如,用户不能四处走动以查看虚拟对象的侧面和背面。此外,3DOF追踪不支持平面检测或碰撞测试。
重要
因为3DOF追踪智能创建有限的AR体验,所以通常不应该直接使用AROrientationTrackingConfiguration类,而是使用子类ARWorldTrackingConfiguration来追踪六自由度(6DOF)、平面检测和碰撞测试。仅在6DOF追踪暂不可用的情况下,才考虑使用3DOF追踪。
API
- init()
创建一个新的方向追踪配置实例。
讨论
要在AR会话中使用该配置,请将其传递给ARSession run(_:options:)方法。