想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,【】以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔记嘛 心路历程记录;然后可能有很多时候都是中英文夹杂,是因为我觉得有些方法并没有很好地中文翻译的意思(比如configuration space),再加上英文能更好的搜索。希望大家能接受这种夹杂写法,或者接受不了的话直接关掉这个看原文
前言:这是一篇02年的关于Motion Planning - Policy search 的论文,然后是看一篇文献综述无意想继续了解,文献综述中:There exist basically two types of trajectory-based policies:
1)way-point based polices ->也就是这一篇的内容
2)dynamical system based
论文:那篇文献综述:A Survey on Policy Search Algorithms for Learning Robot Controllers in a Handful of Trials
此篇文章所介绍的:Motion Planning through policy search
1 Introduction
现在的机器人导航系统分为两种等级的控制:
- global path planning
- local motion control
Global path planning
这种通常都是在低维度空间使用,例如将robot's configuration space离散成x,y点,而在这个情况下的路径我们通常使用Dynamic programming 动态规划算法,因为他能保证在机器人模型和环境的约束下取得最优路径,而且converges very quickly for most environments
其他规划也有:a) potential-field based planners, b) probabilistic roadmaps
虽然到现在看来好像probabilistic roadmaps 更多一点。【DP是一种算法,而其他规划中的PRM才是一种在地图里找路径的方法吧,所以可能还得深入看一下 12,17 reference paper怎么讲的这个事】
Local motion control
虽然我们已经规划出来x,y的waypoint路径点,将其转换为controls for the mobile robot也是一个问题,而一般controls都是五个维度((x,y, heta,v_t,v_r)),而规划出来的x,y才两个维度,所以就引出了local motion control
但是呢 local controller have all abandoned optimality in the local space,以此来适应动态的障碍物和机器人的动力学约束(比如速度无法瞬间到达一个值)
现有的local controller通常都直接把机器人视为一个bounding circle 这样就不需要考虑( heta),【这里我存在异议:就算是个圆也有轮子限制了他需要考虑( heta吧) 还是说完全理想化模型 不考虑转向问题了】
然后呢这些控制器就使用heuristic function去在global planner里寻找local path的结果:The controller then use a variety of heuristics for finding some path that approximates the trajectory suggested by the global planner
这样的缺点也比较明显 high-level structure of the path may be close to optimal, but controls may be suboptimal on a detailed level,而这里的detailed level在对于车穿过一些狭窄的空间又很重要
Paper's Approach
generate a complete plan in the full state space of the robot, 首先是在低维度下做出规划,使用DP value function离散化空间, The plan is represented as a sequence of waypoints and a controller that drives through the waypoints in sequence. 也就是一系列的waypoints和一个控制器【谁... 不是这样呀 拿waypoints的方法,DWA不算是waypoints那种】
- Using the high-dimensional projection of the value function plan as a seed 用价值函数在高维度做映射 作为一个seed
- perform gradient ascent in the plane space 然后在上面的seed plane space里用梯度下降方法
- modifying the waypoints to increase the expected reward of the plan 然后修改waypoints来提高整体plan的期望收益
【所以就是第一点我不是很懂... 等看后面瞅瞅吧 感觉好像RL里MDP原型哦】
这篇文章的假设就是:value function生成的初始路径是靠近optimal solution的【这不就是手动假设不陷入局部最优?】 we don't provide any guarantees on the quality of the final plan if the initial value function policy is allowed to be arbitrarily bad.
2 Related work
这里介绍了我们比较熟悉的一个方法Dynamic window method for converting high-level plans into local controls,这个意思也就是直接把high-level的规划走到了local control那块,不像PRM或者本文的走waypoints先离散再得路径最后local control
关于DWA的比较好的博文:DWA局部路径规划算法论文阅读:The Dynamic Window Approach to Collision Avoidance
这里也提到了Applying online search techniques to continuous-state reinforcement learning说这一篇和本文的方法很像,但是他们是从low-dimensional approximate value function to a higher space,而且他们没有search for polices去最小化 期望收益【我觉得这里文章写错了吧应该是maximize】
【很有意思的是,这部分提到的论文都讲到了方法+缺点,但是对于DWA只是一句话介绍了而没有点明缺点 emmm 有意思】
总结来说:控制理论方法最佳的应用还是在无障碍物的情况下,怎样在二维甚至三维中处理障碍物式的规划还是在继续研究的【可能在我们现在看来 怎么找到这些障碍物分类看起来比控制更为重要?】
3 Markov Decision Processes
【噢 这里看上去... 印证了我说的好像RL的MDP原型,不过这里的公式还不像RL第二版书籍里的那么好看... 就是:02年的时候和21年已经不一样了一点点】
这里我曾看RL书的时候写过马尔科夫笔记:【书籍阅读 Ch3】Reinforcement Learning An Introduction, 2nd Edition
前面主要是MDP的一些公式,比如MDP的描述:((S,s_0,A,T,R)),我们要做的就是maximize reward over the lifetime of the agent
- (S) 是所有的状态,就是包含这个agent的所有可能的状态
- (s_0) 是初始状态
- (A) 是所有可能的动作
- (T) 是transition就是:(T(s,a,s')) 表示在状态(s) 下做出了(a) 的动作后状态变为(s') 的概率是:(T(s,a,s')=p(s'|s,a)) The probability of being in state (s') starting from state (s) and taking action (a)
- (R) 表示reward 收益
3.1 The Value Function Approach
Bellman equation:
这里唯一让我比较疑惑的是,这里的policy (pi(a_k|s_k))是deterministic policy也就是不是概率形式 而是只有0,1的这样 -> (pi(a_k|s_k)= {0,1}),但是这样子的设定很少出现在RL里
随后State-value都会随着policy采取的不同而进行改变,最终updating the policy until the value is maximize over state。而这样就需要考虑computational cost
噢 【上面的疑惑解决了】,这一段的后面提到了:In order to find a policy for continuous, high-dimensional problem, we need a different, more compact representation of a policy, 和一种评估policy的方式
不过RL书里评估policy的方式通常是 (argmax(Q(S_t,a))) q-value的最大,或者是这样的:
3.2 Policy search
这里介绍了,policy search的作用是计算长期的收益【其实好像后面RL管这个长期的叫returns】:policy search operates by evaluating the long term cumulative reward of the current policy
然后现有的不同policy的选择有:Bayes nets[14],neural nets[1] 就是连续化状态特征并返回控制action,但是在这种情况下 mapping from a discrete grid world to these complex representations is not easy
所以呢,本文就将policy表示成a series of waypoints (w_j) 然后再连接着controller
waypoint的呢就比较像这下面这个:
来源google pictureL:Optimal Multi-Criteria Waypoint Selection for Autonomous Vehicle Navigation in Structured Environment

那这个controller:emits actions, where each action moves the agent towards the next(closet) waypoint.
这一系列的waypoints可以被视为从起点到终点路径的线性化后的一系列点,当运行的过程中,下一个时刻t的action a是一个关于现在状态s和下一个waypoint的函数:
这个policy还有一个参数 (d_{approach}) 来决定controller什么时候换到下一个waypoint上,用公式表示也就是:
而这种公式下的policy对于最后一个final policy就不会是全局最优的了(因为没有下一个点)【所以在这里 只要waypoint分的够细就可以减小这种误差?】
如果local controller的模型能准确反应下一个状态的情况,那么policy search对于每一个状态的policy都是很重要的【所以是model-based 就是有环境建模了】
3.3 Initial Policy Estimate
在介绍部分曾经提到过一个guarantee:也就是初始情况不能是随意的 否则结果不一定好(we want an estimate of a good path to begin the search),所以怎样做初始Policy估计对于这一篇的方法也是很重要的:
- extracting the set of maximum likelihood states 在低维度的expected轨迹中提取最大可能的状态【这个likelihood是怎么给出的?】
- 把这些状态映射到高维度空间,得到一系列的waypoints点去反映expected path
- prune by merging path neighbors that share the same value function policy
3.4 Computing the policy value
首先是optimal policy (pi^*) 得法:最大化从起点到终点间的expected reward:
- (pi(s_0)) 是状态(s_0)下的policy
- (s(dt)) 是过(dt)时间后的状态
- 积分符号是指 the expectation reward of the next state distribution after time (d_t)
这里我们做出最后一个假设:local controller是无偏的,也就是说保持下一个状态分布 centered on the expected trajectory 表示为:(G(s(t), heta))【这里的centered on 没有很理解是什么意思?】,这里的( heta) 是local controller的一个参数,这样每一个action的结果都将会是(w_j)和(w_{j+1})之间的最大的likelihood,也使得计算期望分布变得容易
经过上面的变化我们可以简化公式(4)中的积分项 将(p(s(t)|s_0,pi(s_0))) 变为a function centered on the maximum likelihood next state (G(s|s(t), heta):S
arr[0,1]),然后以矩阵形式写(4)公式就变为了:
- (s(dt)) 这里的与上一个公式4中有所不同了,这里表示maximum likelihood next state after time (dt) under policy (pi)
- (G(s(dt))) 表示状态空间的分布情况
- ( heta) 会是local controller里的一个常量
如果再将policy(pi(s_i)) 描述成在欧拉空间的一系列的 n 个waypoints (mathbf{w}_1 dots mathbf{w}_n),公式(4)又可以变为:
因为我们要最大化公式(7)的值,所以显而易见的方式就是:求导取0找最值,在这里的话因为不止一个变量所以是差分在正梯度里求,那么式子就变为了:
注意对于purely deterministic action models(也可以说是完美的控制器),对于(G(cdot))提出来不需要积分,simply integrate the reward along the expected path,而这样的处理方式对于local controller的噪音也可以的纳入考虑,越大的噪音就会采取越保守的策略:the larger the noise in the local controller, the more conservative eventual policy
3.5 Determining policy size
【然后看到这里的伪代码我就疑惑了如果不是PRM的话,那就是... 他们栅格化了地图grid world,然后每一个栅格就是一个单独的state,一个action走到一个对应的栅格,DP的话,定义好了Reward所以可以先来一次所有的state的value价值 emmm 其实如果是按路径长短来看,DP肯定很好了,但是因为这篇论文在开头提及过:需要考虑五个维度也就是速度信息,DP有时候离障碍物太近了所以可能会牺牲速度 减慢之类的,但是走了policy search 对每一个waypoint再来一次max 这样的话 速度就可以保持的比较好】
最初的policy是由n个waypoints的value function来给出的,但是呢optimal policy可能不止n个waypoints,所以我们需要有introduce waypoints as needed的方式
The number of waypoints needed to represent the policy
这里represent:to form or be something,也就是用来表示policy的waypoints的个数的选择就像在expectation-maximize估计clusters一样,这里我们选用K-means的方法?【看了参考15是K-means 但是我所理解的K-means不是做聚类的嘛... 这个number of waypoints的选择是什么...意思】,插入新的waypoint的情况为:
- Run the dynamic program and extract a policy from 2 dimensional value function (Section 3.1) 【所以就是栅格化地图 然后对于每个x,y点都计算一个value值】
- Determine the maximum likelihood trajectory and convert to a set of 5-dimensional waypoints to form tha expected path (Section 3.3)【根据1.选出最好的轨迹然后映射到五维状态的waypoints里 组成期望路径】
- Policy search: for each waypoint (w_j)【policy search指的是:寻找每一个waypoint】
(a) Determine value contribution of trajectory from previous waypoint (w_{j-1}) to next waypoint (w_{j+1}). (Section 3.4)
(b) Measure gradient at endpoints
(c) Move waypoint (w), along gradient until path segment value increases
(d) Repeat for all waypoint until convergence - Add new points (section 3.5)
(a) Find lowest immediate reward along the tory
(b) Insert a new waypoint
(c) Repeat step 3. - Repeat waypoint insertion until convergence
4 Mobile Robot Navigation
as has been stated already, value function planning in a more exact state space is actually computational intractable.【为啥state都弄好了,value function planning还是会无法求解?】
- (R=(-c cdot d)) 当机器人没有到达终点的时候,reward的定义,其中d表示走的距离
- (R=g) 当机器人到达终点,reward等于一个很大的正数
- (R=(-h cdot d)) for attempting to ravel a distance (d) when an obstacle is closer than a certain safety range.
定义好这些reward后,我们可以使用它们来决定机器人的姿态、速度和现在的位置:比如在机器人的在这个状态下撞到障碍物的可能性很大时,通过reward对其进行惩罚。随后状态空间由gradient term (frac{partial}{partial mathbf{w}_{j}})来计算。撞到障碍物的可能性由(zetaleft(mathbf{w}_{j} ight))来决定,then we compute the gradient as:
到这里理论的推导就完全结束了,但是我想问的问题很多.... 主要是没法根据现有的这一套去复现他的操作:
- 对于waypoint的定义应该就是state的意思了,也就是waypoint是五维的,包含速度信息,那么reward的定义仅根据距离d就定义是否没有考虑速度了?
- 既然第一步已经栅格化了地图,直接在栅格化的里面把每个栅格看做一个waypoint不行吗?前后有连接关系的那种
- 关于第一点的疑惑,还是说速度v和距离d是有关系的,也就是距离障碍物的d与速度成反比,但是文章中也没点明这个点
5 Experimental Results
这个具体的就是 他们的规划时间虽然增多了,路径长了,但是运行时间短,也就是速度是连续的 不需要减速,这幅图可能能体现出一点那个意思:
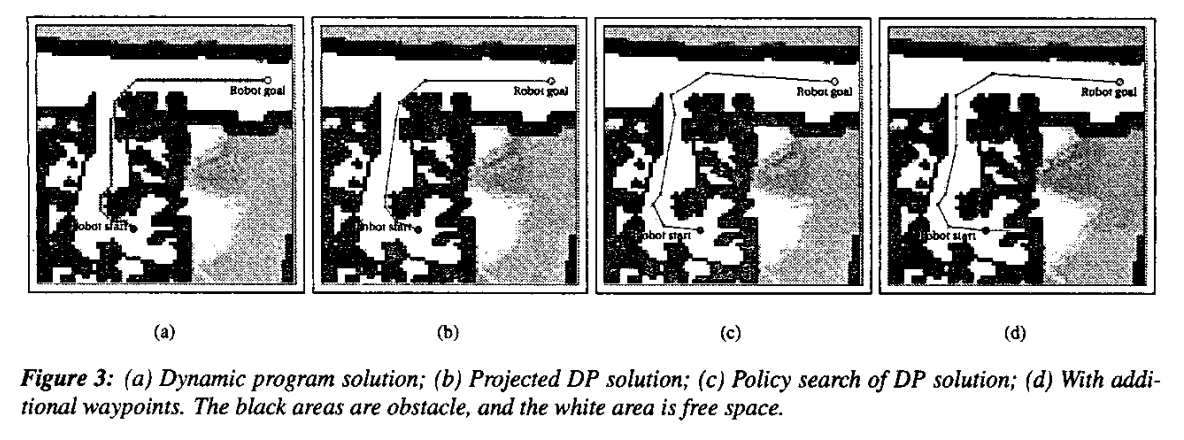
(a)(b)图以value function确实得出了一条路径,但是要是考虑可行性,例如车的尺寸在这里是54cm,那个走廊的宽度是60cm,这个肯定没有(c)(d)可行性高,或者说风险更小。(c)图是没有加入waypoint 也就是Table 1中第四步,(d)图中with additional waypoints可以看到在走廊的路径更为直线的行驶。【这样子的方式加入是否可以用到lattice形式,使motion planning直接加入到考虑 更为平滑?但是这个速度的关系还是没有点明】
6 Conclusion
所以呢,整篇论文提出了:how seeding of the policy search with a solution from an approximate value function can be used to directly perform motion planning in the full state space of the robot.
而正如我前面提到的这里的MDP是fully observable,所以对于动态的障碍物可能无法,算是一个全局的policy search,更像是怎样更高速符合motion planning的方式去运行机器人