总结自论文:Faster_RCNN,与Pytorch代码:
本文主要介绍代码第二部分:model/ , 首先分析一些主要理论操作,然后在代码分析里详细介绍其具体实现。
首先在参考文章的基础上进一步详细绘制了模型的流程图。在 上一篇博客中介绍了模型的上半部分,本文将对模型的下半部分做一介绍。
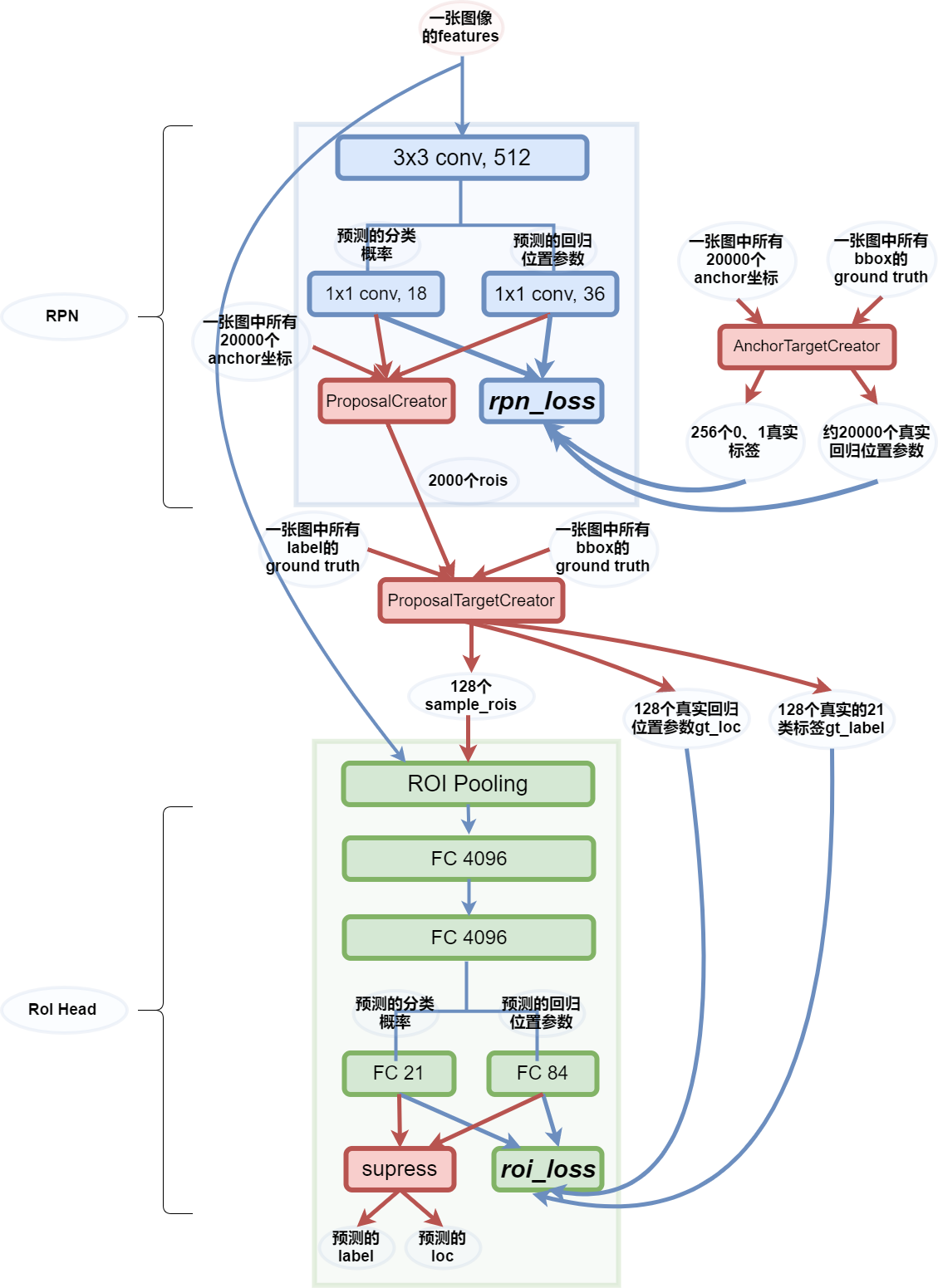
Faster-RCNN流程图
1. roi_module.py


from collections import namedtuple from string import Template import cupy, torch import cupy as cp import torch as t from torch.autograd import Function from model.utils.roi_cupy import kernel_backward, kernel_forward Stream = namedtuple('Stream', ['ptr']) @cupy.util.memoize(for_each_device=True) def load_kernel(kernel_name, code, **kwargs): cp.cuda.runtime.free(0) code = Template(code).substitute(**kwargs) kernel_code = cupy.cuda.compile_with_cache(code) return kernel_code.get_function(kernel_name) CUDA_NUM_THREADS = 1024 def GET_BLOCKS(N, K=CUDA_NUM_THREADS): return (N + K - 1) // K class RoI(Function): """ NOTE:only CUDA-compatible """ def __init__(self, outh, outw, spatial_scale): self.forward_fn = load_kernel('roi_forward', kernel_forward) self.backward_fn = load_kernel('roi_backward', kernel_backward) self.outh, self.outw, self.spatial_scale = outh, outw, spatial_scale def forward(self, x, rois): # NOTE: MAKE SURE input is contiguous too x = x.contiguous() rois = rois.contiguous() self.in_size = B, C, H, W = x.size() self.N = N = rois.size(0) output = t.zeros(N, C, self.outh, self.outw).cuda() self.argmax_data = t.zeros(N, C, self.outh, self.outw).int().cuda() self.rois = rois args = [x.data_ptr(), rois.data_ptr(), output.data_ptr(), self.argmax_data.data_ptr(), self.spatial_scale, C, H, W, self.outh, self.outw, output.numel()] stream = Stream(ptr=torch.cuda.current_stream().cuda_stream) self.forward_fn(args=args, block=(CUDA_NUM_THREADS, 1, 1), grid=(GET_BLOCKS(output.numel()), 1, 1), stream=stream) return output def backward(self, grad_output): ##NOTE: IMPORTANT CONTIGUOUS # TODO: input grad_output = grad_output.contiguous() B, C, H, W = self.in_size grad_input = t.zeros(self.in_size).cuda() stream = Stream(ptr=torch.cuda.current_stream().cuda_stream) args = [grad_output.data_ptr(), self.argmax_data.data_ptr(), self.rois.data_ptr(), grad_input.data_ptr(), self.N, self.spatial_scale, C, H, W, self.outh, self.outw, grad_input.numel()] self.backward_fn(args=args, block=(CUDA_NUM_THREADS, 1, 1), grid=(GET_BLOCKS(grad_input.numel()), 1, 1), stream=stream ) return grad_input, None class RoIPooling2D(t.nn.Module): def __init__(self, outh, outw, spatial_scale): super(RoIPooling2D, self).__init__() self.RoI = RoI(outh, outw, spatial_scale) def forward(self, x, rois): return self.RoI(x, rois) def test_roi_module(): ## fake data### B, N, C, H, W, PH, PW = 2, 8, 4, 32, 32, 7, 7 bottom_data = t.randn(B, C, H, W).cuda() bottom_rois = t.randn(N, 5) bottom_rois[:int(N / 2), 0] = 0 bottom_rois[int(N / 2):, 0] = 1 bottom_rois[:, 1:] = (t.rand(N, 4) * 100).float() bottom_rois = bottom_rois.cuda() spatial_scale = 1. / 16 outh, outw = PH, PW # pytorch version module = RoIPooling2D(outh, outw, spatial_scale) x = t.autograd.Variable(bottom_data, requires_grad=True) rois = t.autograd.Variable(bottom_rois) output = module(x, rois) output.sum().backward() def t2c(variable): npa = variable.data.cpu().numpy() return cp.array(npa) def test_eq(variable, array, info): cc = cp.asnumpy(array) neq = (cc != variable.data.cpu().numpy()) assert neq.sum() == 0, 'test failed: %s' % info # chainer version,if you're going to run this # pip install chainer import chainer.functions as F from chainer import Variable x_cn = Variable(t2c(x)) o_cn = F.roi_pooling_2d(x_cn, t2c(rois), outh, outw, spatial_scale) test_eq(output, o_cn.array, 'forward') F.sum(o_cn).backward() test_eq(x.grad, x_cn.grad, 'backward') print('test pass')
主要利用cupy实现ROI Pooling的前向传播和反向传播。NMS和ROI pooling利用了:cupy和chainer ,没用过,占个坑先。
其主要任务是对于一张图象得到的feature map(512, w/16, h/16),然后利用sample_roi的bbox坐标去在特征图上裁剪下来所有roi对应的特征图(训练:128, 512, w/16, h/16)、(测试:300,512,w/16,h/16)。
2 . region_proposal_network.py
import numpy as np from torch.nn import functional as F import torch as t from torch import nn from model.utils.bbox_tools import generate_anchor_base from model.utils.creator_tool import ProposalCreator class RegionProposalNetwork(nn.Module): """Region Proposal Network introduced in Faster R-CNN. This is Region Proposal Network introduced in Faster R-CNN [#]_. This takes features extracted from images and propose class agnostic bounding boxes around "objects". .. [#] Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. NIPS 2015. Args: in_channels (int): The channel size of input. mid_channels (int): The channel size of the intermediate tensor. ratios (list of floats): This is ratios of width to height of the anchors. anchor_scales (list of numbers): This is areas of anchors. Those areas will be the product of the square of an element in :obj:`anchor_scales` and the original area of the reference window. feat_stride (int): Stride size after extracting features from an image. initialW (callable): Initial weight value. If :obj:`None` then this function uses Gaussian distribution scaled by 0.1 to initialize weight. May also be a callable that takes an array and edits its values. proposal_creator_params (dict): Key valued paramters for :class:`model.utils.creator_tools.ProposalCreator`. .. seealso:: :class:`~model.utils.creator_tools.ProposalCreator` """ def __init__( self, in_channels=512, mid_channels=512, ratios=[0.5, 1, 2], anchor_scales=[8, 16, 32], feat_stride=16, proposal_creator_params=dict(), ): super(RegionProposalNetwork, self).__init__() self.anchor_base = generate_anchor_base( anchor_scales=anchor_scales, ratios=ratios) self.feat_stride = feat_stride self.proposal_layer = ProposalCreator(self, **proposal_creator_params) n_anchor = self.anchor_base.shape[0] self.conv1 = nn.Conv2d(in_channels, mid_channels, 3, 1, 1) self.score = nn.Conv2d(mid_channels, n_anchor * 2, 1, 1, 0) self.loc = nn.Conv2d(mid_channels, n_anchor * 4, 1, 1, 0) normal_init(self.conv1, 0, 0.01) normal_init(self.score, 0, 0.01) normal_init(self.loc, 0, 0.01) def forward(self, x, img_size, scale=1.): """Forward Region Proposal Network. Here are notations. * :math:`N` is batch size. * :math:`C` channel size of the input. * :math:`H` and :math:`W` are height and witdh of the input feature. * :math:`A` is number of anchors assigned to each pixel. Args: x (~torch.autograd.Variable): The Features extracted from images. Its shape is :math:`(N, C, H, W)`. img_size (tuple of ints): A tuple :obj:`height, width`, which contains image size after scaling. scale (float): The amount of scaling done to the input images after reading them from files. Returns: (~torch.autograd.Variable, ~torch.autograd.Variable, array, array, array): This is a tuple of five following values. * **rpn_locs**: Predicted bounding box offsets and scales for anchors. Its shape is :math:`(N, H W A, 4)`. * **rpn_scores**: Predicted foreground scores for anchors. Its shape is :math:`(N, H W A, 2)`. * **rois**: A bounding box array containing coordinates of proposal boxes. This is a concatenation of bounding box arrays from multiple images in the batch. Its shape is :math:`(R', 4)`. Given :math:`R_i` predicted bounding boxes from the :math:`i` th image, :math:`R' = \sum _{i=1} ^ N R_i`. * **roi_indices**: An array containing indices of images to which RoIs correspond to. Its shape is :math:`(R',)`. * **anchor**: Coordinates of enumerated shifted anchors. Its shape is :math:`(H W A, 4)`. """ n, _, hh, ww = x.shape anchor = _enumerate_shifted_anchor( np.array(self.anchor_base), self.feat_stride, hh, ww) n_anchor = anchor.shape[0] // (hh * ww) h = F.relu(self.conv1(x)) rpn_locs = self.loc(h) # UNNOTE: check whether need contiguous # A: Yes rpn_locs = rpn_locs.permute(0, 2, 3, 1).contiguous().view(n, -1, 4) rpn_scores = self.score(h) rpn_scores = rpn_scores.permute(0, 2, 3, 1).contiguous() rpn_fg_scores = rpn_scores.view(n, hh, ww, n_anchor, 2)[:, :, :, :, 1].contiguous() rpn_fg_scores = rpn_fg_scores.view(n, -1) rpn_scores = rpn_scores.view(n, -1, 2) rois = list() roi_indices = list() for i in range(n): roi = self.proposal_layer( rpn_locs[i].cpu().data.numpy(), rpn_fg_scores[i].cpu().data.numpy(), anchor, img_size, scale=scale) batch_index = i * np.ones((len(roi),), dtype=np.int32) rois.append(roi) roi_indices.append(batch_index) rois = np.concatenate(rois, axis=0) roi_indices = np.concatenate(roi_indices, axis=0) return rpn_locs, rpn_scores, rois, roi_indices, anchor def _enumerate_shifted_anchor(anchor_base, feat_stride, height, width): # Enumerate all shifted anchors: # # add A anchors (1, A, 4) to # cell K shifts (K, 1, 4) to get # shift anchors (K, A, 4) # reshape to (K*A, 4) shifted anchors # return (K*A, 4) # !TODO: add support for torch.CudaTensor # xp = cuda.get_array_module(anchor_base) # it seems that it can't be boosed using GPU import numpy as xp shift_y = xp.arange(0, height * feat_stride, feat_stride) shift_x = xp.arange(0, width * feat_stride, feat_stride) shift_x, shift_y = xp.meshgrid(shift_x, shift_y) shift = xp.stack((shift_y.ravel(), shift_x.ravel(), shift_y.ravel(), shift_x.ravel()), axis=1) A = anchor_base.shape[0] K = shift.shape[0] anchor = anchor_base.reshape((1, A, 4)) + shift.reshape((1, K, 4)).transpose((1, 0, 2)) anchor = anchor.reshape((K * A, 4)).astype(np.float32) return anchor def _enumerate_shifted_anchor_torch(anchor_base, feat_stride, height, width): # Enumerate all shifted anchors: # # add A anchors (1, A, 4) to # cell K shifts (K, 1, 4) to get # shift anchors (K, A, 4) # reshape to (K*A, 4) shifted anchors # return (K*A, 4) # !TODO: add support for torch.CudaTensor # xp = cuda.get_array_module(anchor_base) import torch as t shift_y = t.arange(0, height * feat_stride, feat_stride) shift_x = t.arange(0, width * feat_stride, feat_stride) shift_x, shift_y = xp.meshgrid(shift_x, shift_y) shift = xp.stack((shift_y.ravel(), shift_x.ravel(), shift_y.ravel(), shift_x.ravel()), axis=1) A = anchor_base.shape[0] K = shift.shape[0] anchor = anchor_base.reshape((1, A, 4)) + shift.reshape((1, K, 4)).transpose((1, 0, 2)) anchor = anchor.reshape((K * A, 4)).astype(np.float32) return anchor def normal_init(m, mean, stddev, truncated=False): """ weight initalizer: truncated normal and random normal. """ # x is a parameter if truncated: m.weight.data.normal_().fmod_(2).mul_(stddev).add_(mean) # not a perfect approximation else: m.weight.data.normal_(mean, stddev) m.bias.data.zero_()
这个脚本主要利用之前介绍的类与函数实现RPN网络:RegionProposalNetwork
因为是网络,所以继承自pytorch中的nn.Module
RPN网络流程我们之前介绍过一部分,这里完整的实现整个网络。
首先初始化网络的结构:特征(N,512,h,w)输入进来(原图像的大小:16*h,16*w),首先是加pad的512个3*3大小卷积核,输出仍为(N,512,h,w)。然后左右两边各有一个1*1卷积。左路为18个1*1卷积,输出为(N,18,h,w),即所有anchor的0-1类别概率(h*w约为2400,h*w*9约为20000)。右路为36个1*1卷积,输出为(N,36,h,w),即所有anchor的回归位置参数。
前向传播:输入特征即feature map,调用函数_enumerate_shifted_anchor生成全部20000个anchor。然后特征经过卷积,在经过两路卷积分别输出rpn_locs, rpn_scores。然后rpn_locs, rpn_scores作为ProposalCreator的输入产生2000个rois,同时还有 roi_indices,这个 roi_indices在此代码中是多余的,因为我们实现的是batch_siae=1的网络,一个batch只会输入一张图象。如果多张图象的话就需要存储索引以找到对应图像的roi。
注:函数_enumerate_shifted_anchor 介绍过了,就是利用9个anchor_base来生成所有20000个anchor的坐标。函数normal_init即对网络权重初始化。
3. faster_rcnn.py
from __future__ import division import torch as t import numpy as np import cupy as cp from utils import array_tool as at from model.utils.bbox_tools import loc2bbox from model.utils.nms import non_maximum_suppression from torch import nn from data.dataset import preprocess from torch.nn import functional as F from utils.config import opt class FasterRCNN(nn.Module): """Base class for Faster R-CNN. This is a base class for Faster R-CNN links supporting object detection API [#]_. The following three stages constitute Faster R-CNN. 1. **Feature extraction**: Images are taken and their feature maps are calculated. 2. **Region Proposal Networks**: Given the feature maps calculated in the previous stage, produce set of RoIs around objects. 3. **Localization and Classification Heads**: Using feature maps that belong to the proposed RoIs, classify the categories of the objects in the RoIs and improve localizations. Each stage is carried out by one of the callable :class:`torch.nn.Module` objects :obj:`feature`, :obj:`rpn` and :obj:`head`. There are two functions :meth:`predict` and :meth:`__call__` to conduct object detection. :meth:`predict` takes images and returns bounding boxes that are converted to image coordinates. This will be useful for a scenario when Faster R-CNN is treated as a black box function, for instance. :meth:`__call__` is provided for a scnerario when intermediate outputs are needed, for instance, for training and debugging. Links that support obejct detection API have method :meth:`predict` with the same interface. Please refer to :meth:`predict` for further details. .. [#] Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. NIPS 2015. Args: extractor (nn.Module): A module that takes a BCHW image array and returns feature maps. rpn (nn.Module): A module that has the same interface as :class:`model.region_proposal_network.RegionProposalNetwork`. Please refer to the documentation found there. head (nn.Module): A module that takes a BCHW variable, RoIs and batch indices for RoIs. This returns class dependent localization paramters and class scores. loc_normalize_mean (tuple of four floats): Mean values of localization estimates. loc_normalize_std (tupler of four floats): Standard deviation of localization estimates. """ def __init__(self, extractor, rpn, head, loc_normalize_mean = (0., 0., 0., 0.), loc_normalize_std = (0.1, 0.1, 0.2, 0.2) ): super(FasterRCNN, self).__init__() self.extractor = extractor self.rpn = rpn self.head = head # mean and std self.loc_normalize_mean = loc_normalize_mean self.loc_normalize_std = loc_normalize_std self.use_preset('evaluate') @property def n_class(self): # Total number of classes including the background. return self.head.n_class def forward(self, x, scale=1.): """Forward Faster R-CNN. Scaling paramter :obj:`scale` is used by RPN to determine the threshold to select small objects, which are going to be rejected irrespective of their confidence scores. Here are notations used. * :math:`N` is the number of batch size * :math:`R'` is the total number of RoIs produced across batches. Given :math:`R_i` proposed RoIs from the :math:`i` th image, :math:`R' = \sum _{i=1} ^ N R_i`. * :math:`L` is the number of classes excluding the background. Classes are ordered by the background, the first class, ..., and the :math:`L` th class. Args: x (autograd.Variable): 4D image variable. scale (float): Amount of scaling applied to the raw image during preprocessing. Returns: Variable, Variable, array, array: Returns tuple of four values listed below. * **roi_cls_locs**: Offsets and scalings for the proposed RoIs. Its shape is :math:`(R', (L + 1) \times 4)`. * **roi_scores**: Class predictions for the proposed RoIs. Its shape is :math:`(R', L + 1)`. * **rois**: RoIs proposed by RPN. Its shape is :math:`(R', 4)`. * **roi_indices**: Batch indices of RoIs. Its shape is :math:`(R',)`. """ img_size = x.shape[2:] h = self.extractor(x) rpn_locs, rpn_scores, rois, roi_indices, anchor = self.rpn(h, img_size, scale) roi_cls_locs, roi_scores = self.head( h, rois, roi_indices) return roi_cls_locs, roi_scores, rois, roi_indices def use_preset(self, preset): """Use the given preset during prediction. This method changes values of :obj:`self.nms_thresh` and :obj:`self.score_thresh`. These values are a threshold value used for non maximum suppression and a threshold value to discard low confidence proposals in :meth:`predict`, respectively. If the attributes need to be changed to something other than the values provided in the presets, please modify them by directly accessing the public attributes. Args: preset ({'visualize', 'evaluate'): A string to determine the preset to use. """ if preset == 'visualize': self.nms_thresh = 0.3 self.score_thresh = 0.7 elif preset == 'evaluate': self.nms_thresh = 0.3 self.score_thresh = 0.05 else: raise ValueError('preset must be visualize or evaluate') def _suppress(self, raw_cls_bbox, raw_prob): bbox = list() label = list() score = list() # skip cls_id = 0 because it is the background class for l in range(1, self.n_class): cls_bbox_l = raw_cls_bbox.reshape((-1, self.n_class, 4))[:, l, :] prob_l = raw_prob[:, l] mask = prob_l > self.score_thresh cls_bbox_l = cls_bbox_l[mask] prob_l = prob_l[mask] keep = non_maximum_suppression( cp.array(cls_bbox_l), self.nms_thresh, prob_l) keep = cp.asnumpy(keep) bbox.append(cls_bbox_l[keep]) # The labels are in [0, self.n_class - 2]. label.append((l - 1) * np.ones((len(keep),))) score.append(prob_l[keep]) bbox = np.concatenate(bbox, axis=0).astype(np.float32) label = np.concatenate(label, axis=0).astype(np.int32) score = np.concatenate(score, axis=0).astype(np.float32) return bbox, label, score def predict(self, imgs,sizes=None,visualize=False): """Detect objects from images. This method predicts objects for each image. Args: imgs (iterable of numpy.ndarray): Arrays holding images. All images are in CHW and RGB format and the range of their value is :math:`[0, 255]`. Returns: tuple of lists: This method returns a tuple of three lists, :obj:`(bboxes, labels, scores)`. * **bboxes**: A list of float arrays of shape :math:`(R, 4)`, where :math:`R` is the number of bounding boxes in a image. Each bouding box is organized by :math:`(y_{min}, x_{min}, y_{max}, x_{max})` in the second axis. * **labels** : A list of integer arrays of shape :math:`(R,)`. Each value indicates the class of the bounding box. Values are in range :math:`[0, L - 1]`, where :math:`L` is the number of the foreground classes. * **scores** : A list of float arrays of shape :math:`(R,)`. Each value indicates how confident the prediction is. """ self.eval() if visualize: self.use_preset('visualize') prepared_imgs = list() sizes = list() for img in imgs: size = img.shape[1:] img = preprocess(at.tonumpy(img)) prepared_imgs.append(img) sizes.append(size) else: prepared_imgs = imgs bboxes = list() labels = list() scores = list() for img, size in zip(prepared_imgs, sizes): img = t.autograd.Variable(at.totensor(img).float()[None], volatile=True) scale = img.shape[3] / size[1] roi_cls_loc, roi_scores, rois, _ = self(img, scale=scale) # We are assuming that batch size is 1. roi_score = roi_scores.data roi_cls_loc = roi_cls_loc.data roi = at.totensor(rois) / scale # Convert predictions to bounding boxes in image coordinates. # Bounding boxes are scaled to the scale of the input images. mean = t.Tensor(self.loc_normalize_mean).cuda(). repeat(self.n_class)[None] std = t.Tensor(self.loc_normalize_std).cuda(). repeat(self.n_class)[None] roi_cls_loc = (roi_cls_loc * std + mean) roi_cls_loc = roi_cls_loc.view(-1, self.n_class, 4) roi = roi.view(-1, 1, 4).expand_as(roi_cls_loc) cls_bbox = loc2bbox(at.tonumpy(roi).reshape((-1, 4)), at.tonumpy(roi_cls_loc).reshape((-1, 4))) cls_bbox = at.totensor(cls_bbox) cls_bbox = cls_bbox.view(-1, self.n_class * 4) # clip bounding box cls_bbox[:, 0::2] = (cls_bbox[:, 0::2]).clamp(min=0, max=size[0]) cls_bbox[:, 1::2] = (cls_bbox[:, 1::2]).clamp(min=0, max=size[1]) prob = at.tonumpy(F.softmax(at.tovariable(roi_score), dim=1)) raw_cls_bbox = at.tonumpy(cls_bbox) raw_prob = at.tonumpy(prob) bbox, label, score = self._suppress(raw_cls_bbox, raw_prob) bboxes.append(bbox) labels.append(label) scores.append(score) self.use_preset('evaluate') self.train() return bboxes, labels, scores def get_optimizer(self): """ return optimizer, It could be overwriten if you want to specify special optimizer """ lr = opt.lr params = [] for key, value in dict(self.named_parameters()).items(): if value.requires_grad: if 'bias' in key: params += [{'params': [value], 'lr': lr * 2, 'weight_decay': 0}] else: params += [{'params': [value], 'lr': lr, 'weight_decay': opt.weight_decay}] if opt.use_adam: self.optimizer = t.optim.Adam(params) else: self.optimizer = t.optim.SGD(params, momentum=0.9) return self.optimizer def scale_lr(self, decay=0.1): for param_group in self.optimizer.param_groups: param_group['lr'] *= decay return self.optimizer
此脚本定义了Faster-RCNN的基本类FasterRCNN。Faster-RCNN的三个步骤:
- 特征提取:输入一张图片得到其特征图feature map
- RPN:给定特征图后产生一系列RoIs
- 定位与分类:利用这些RoIs对应的特征图对这些RoIs中的类别进行分类,并提升定位精度
在类FasterRCNN中便初始化了这三个重要步骤:
- self.extractor
- self.rpn
- self.head
函数forward实现前向传播:
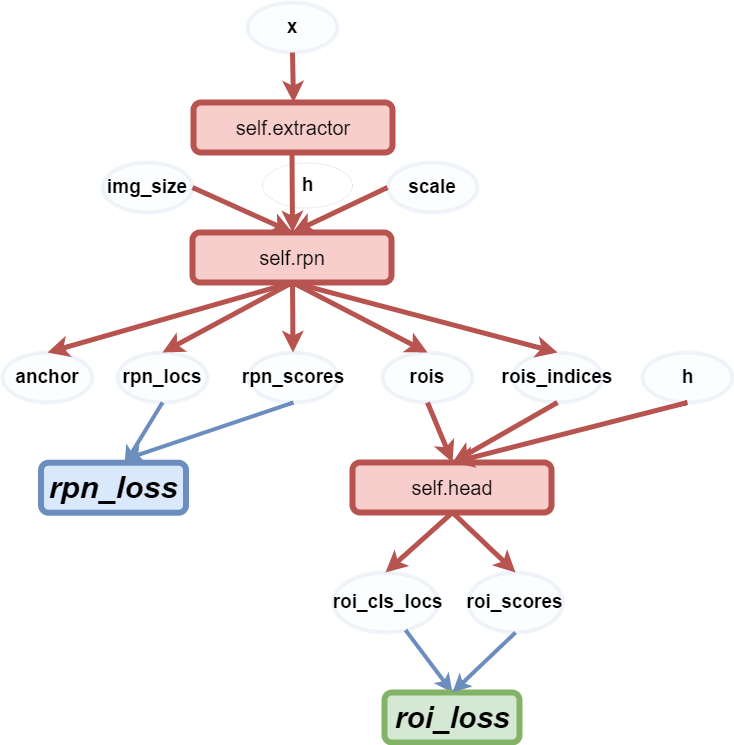
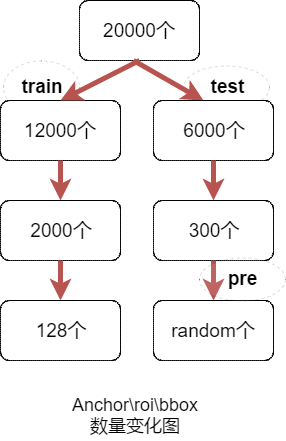
Faster-RCNN前向传播网络 边界框数量变化
注:AnchorTargetCreator和ProposalTargetCreator是为了生成训练的目标,只在训练阶段用到,ProposalCreator是RPN为Fast R-CNN生成RoIs,在训练和测试阶段都会用到。所以测试阶段ProposalCreator为Fast R-CNN生成了300个RoIs,不经ProposalCreator直接送给RoIHead网络。而训练阶段2000个RoI再经ProposalCreator得到128个RoI。(别忘了ProposalCreator的用途是为训练RoIHead网络分配ground truth的,测试阶段当然不需要了
预测过程:
函数predict实现了对测试集的图片预测,也是batch为1,即每次输入一张图片。
首先设置为eval()模式,然后对读入的图片求尺度scale,因为输入的图像经预处理就会有缩放,所以需记录缩放因子scale,这个缩放因子在ProposalCreator筛选roi时有用到,即将所有候选框按这个缩放因子映射回原图,超出原图边框的趋于将被截断。上图中经过前向传播后会输出roi_cls_locs和roi_scores。同时我们还需要输入到RoIhead的128个rois。因为ProposalCreator对loc做了归一化(-mean /std)处理,所以这里需要再*std+mean,此时的位置参数loc为roi_cls_loc。然后将这128个roi利用roi_cls_loc进行微调,得到新的cls_bbox。对于分类得分roi_scores,我们需要将其经过softmax后转为概率prob。值得注意的是我们此时得到的是对所有输入128个roi以及位置参数、得分的预处理,下面将筛选出最后最终的预测结果。
上面步骤是对网络RoIhead网络输出的预处理,函数_suppress将得到真正的预测结果。此函数是一个按类别的循环,l从1至20(0类为背景类)。即预测思想是按20个类别顺序依次验证,如果有满足该类的预测结果,则记录,否则转入下一类(一张图中也就几个类别而已)。例如筛选预测出第1类的结果,首先在cls_bbox中将所有128个预测第1类的bbox坐标找出,然后从prob中找出128个第1类的概率。因为阈值为0.7,也即概率>0.7的所有边框初步被判定预测正确,记录下来。然而可能有多个边框预测第1类中同一个物体,同类中一个物体只需一个边框,所以需再经基于类的NMS后使得每类每个物体只有一个边框,至此第1类预测完成,记录第1类的所有边框坐标、标签、置信度。接着下一类...,直至20类都记录下来,那么一张图片(也即一个batch)的预测也就结束了。
经测试,GTX1080、32G内存在可视化情况下,VOC2007 一个epoch:trainval 5011张36分钟完成,测试集test4952张13分钟完成。
最后定义了优化器optimizer:对于需要求导的参数 按照是否含bias赋予不同的学习率。默认是使用SGD,可选Adam,不过需更小的学习率。
4. faster_rcnn_vgg16.py
定义了类FasterRCNNVGG16,继承自上面的类FasterRCNN。
首先引入VGG16,然后拆分为特征提取网络和分类网络。冻结分类网络的前几层,不进行反向传播。
然后实现VGG16RoIHead网络。实现输入特征图、rois、roi_indices,输出roi_scls_locs和roi_scores。
类FasterRCNNVGG16分别对特征VGG16的特征提取部分、分类部分、RPN网络、VGG16RoIHead网络进行了实例化。
此外在对VGG16RoIHead网络的全连接层权重初始化过程中,按照图像是否为truncated分了两种初始化分方法。
Reference: