文章来源:https://blog.csdn.net/on2way/article/details/46851451
梯度简单来说就是求导,在图像上表现出来的就是提取图像的边缘(不管是横向的、纵向的、斜方向的等等),所需要的无非也是一个核模板,模板的不同结果也不同。所以可以看到,所有的这些个算子函数,归结到底都可以用函数cv2.filter2D()来表示,不同的方法给予不同的核模板,然后演化为不同的算子而已。并且这只是这类滤波函数的一个用途,曾经写过一个关于matlab下滤波函数imfilter()的扩展应用(等同于opencv的cv2.filter2D函数):
就是很多复杂的计算都是可以通过这个滤波函数组合实现,这样的话速度快。
(一)关于Sobel算子与Scharr算子
Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪能力很强,用途较多。一般的sobel算子包括x与y两个方向,算子模板为:
在opencv函数中,还可以设置卷积核(ksize)的大小,如果ksize=-1,就演变为3*3的Scharr算子,模板无非变了个数字:
贴一个相关详细参考:
(二)关于拉普拉斯(Laplacian)算子
拉普拉斯算子可以实现图像的二阶倒数的定义,至于二阶倒数有什么意义,可以看这位博主的详细介绍:
OpenCV-Python教程(7、Laplacian算子)
其核模板为:
下面是对上述三种模板的实例:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('flower.jpg',0)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)#默认ksize=3
sobely = cv2.Sobel(img,cv2.CV_64F,0,1)
sobelxy = cv2.Sobel(img,cv2.CV_64F,1,1)
laplacian = cv2.Laplacian(img,cv2.CV_64F)#默认ksize=3
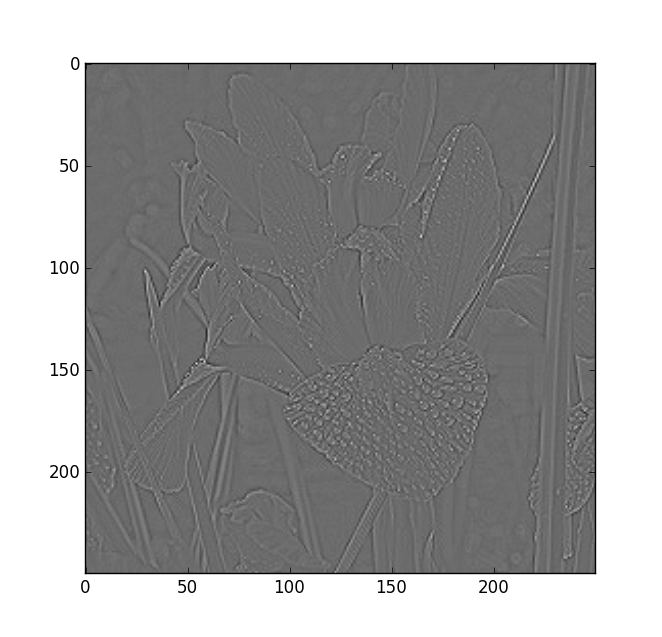
#人工生成一个高斯核,去和函数生成的比较
kernel = np.array([[0,-1,0],[-1,4,-1],[0,-1,0]],np.float32)#
img1 = np.float64(img)#转化为浮点型的
img_filter = cv2.filter2D(img1,-1,kernel)
sobelxy1 = cv2.Sobel(img1,-1,1,1)
plt.subplot(221),plt.imshow(sobelx,'gray')
plt.subplot(222),plt.imshow(sobely,'gray')
plt.subplot(223),plt.imshow(sobelxy,'gray')
plt.subplot(224),plt.imshow(laplacian,'gray')
plt.figure()
plt.imshow(img_filter,'gray')
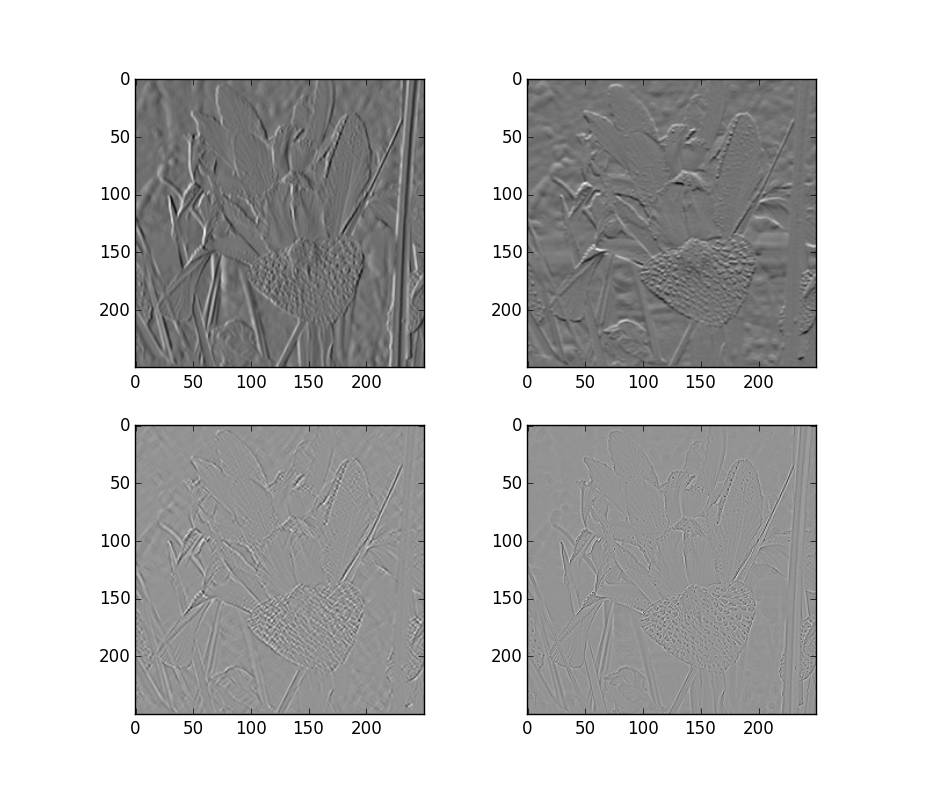
上述一个很重要的问题需要明白的就是,在滤波函数第二个参数,当我们使用-1表示输出图像与输入图像的数据类型一致时,如果原始图像是uint8型的,那么在经过算子计算以后,得到的图像可能会有负值,如果与原图像数据类型一致,那么负值就会被截断变成0或者255,使得结果错误,那么针对这种问题有两种方式改变(上述程序中都有):一种就是改变输出图像的数据类型(第二个参数cv2.CV_64F),另一种就是改变原始图像的数据类型(此时第二个参数可以为-1,与原始图像一致)。
上述程序从结果上也说明使用函数cv2.filter2D也能达到相同的效果。
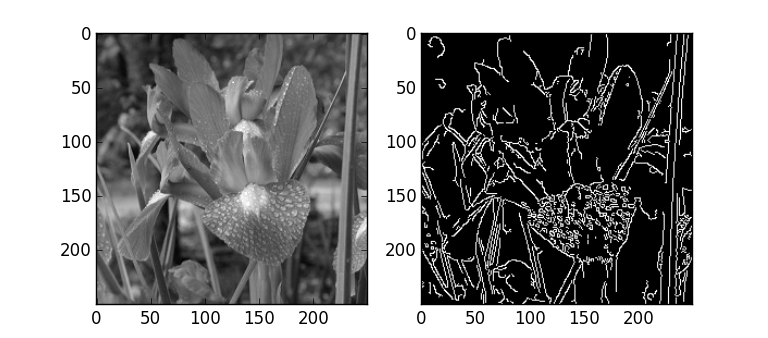
(三)Canny边缘检测算子
关于canny边缘检测算子,细究的话还算比较的复杂,给出一个介绍比较详细的博客吧:
那么opencv中的函数也非常简单,直接cv2.Canny(),这个函数需要五个参数,原始图像,两个范围控制值minVal和maxVal(见上述原理介绍),第四个参数用于规定核模板的大小(默认3),最后一个是true与false(默认)的选择,有一点不同,不太重要,可以试着那个好用那个。
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('flower.jpg',0)
edges = cv2.Canny(img,100,200)#其他的默认
plt.subplot(121),plt.imshow(img,'gray')
plt.subplot(122),plt.imshow(edges,'gray')