Ceres为google开源非线性优化库。
计算微分方法
- 符号微分 Analytic Derivative
- 数值微分 Numeric Derivative
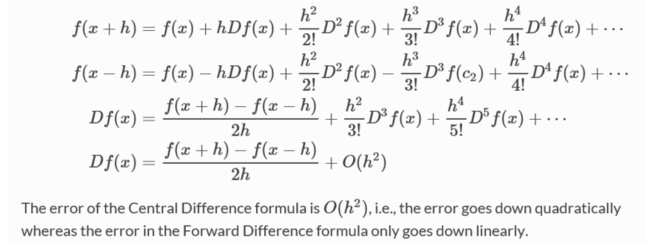
Forward Difference

Central Difference
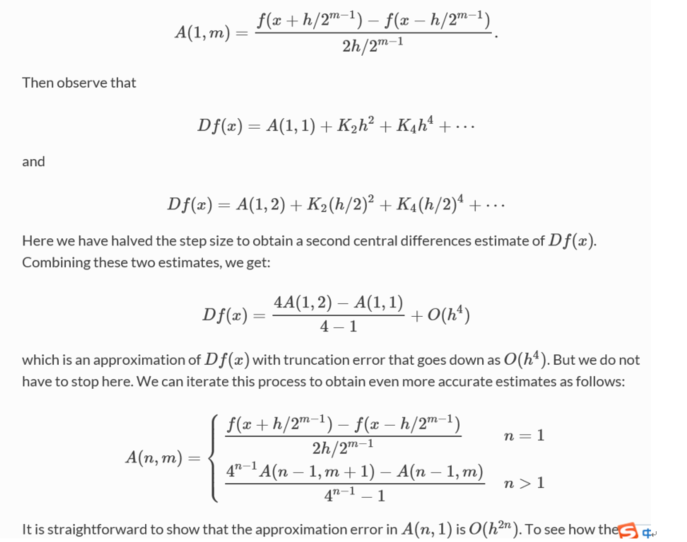
Ridders’ Method
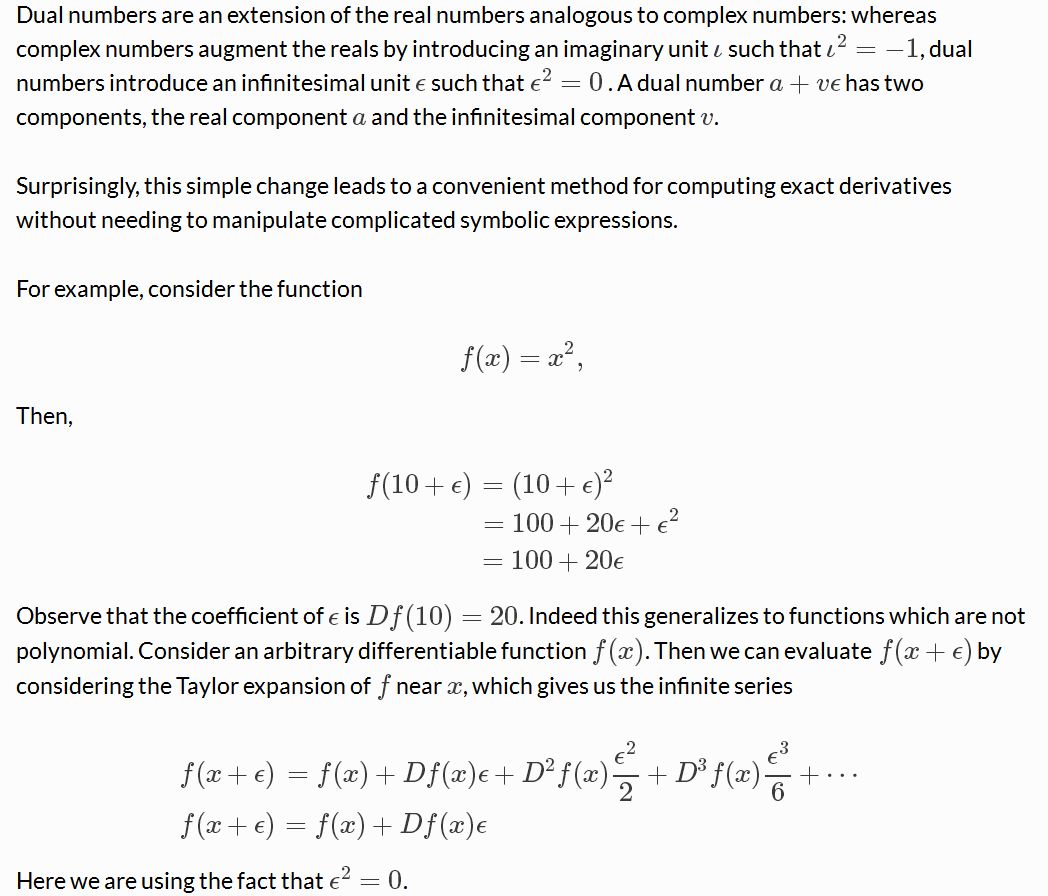
- 自动微分Automatic Derivative
自动微分可以精确快速的算出微分值。


1 // Ceres Solver - A fast non-linear least squares minimizer 2 // Copyright 2015 Google Inc. All rights reserved. 3 // http://ceres-solver.org/ 4 // 5 // Redistribution and use in source and binary forms, with or without 6 // modification, are permitted provided that the following conditions are met: 7 // 8 // * Redistributions of source code must retain the above copyright notice, 9 // this list of conditions and the following disclaimer. 10 // * Redistributions in binary form must reproduce the above copyright notice, 11 // this list of conditions and the following disclaimer in the documentation 12 // and/or other materials provided with the distribution. 13 // * Neither the name of Google Inc. nor the names of its contributors may be 14 // used to endorse or promote products derived from this software without 15 // specific prior written permission. 16 // 17 // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" 18 // AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE 19 // IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE 20 // ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE 21 // LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR 22 // CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF 23 // SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS 24 // INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN 25 // CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) 26 // ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE 27 // POSSIBILITY OF SUCH DAMAGE. 28 // 29 // Author: keir@google.com (Keir Mierle) 30 // 31 // A simple implementation of N-dimensional dual numbers, for automatically 32 // computing exact derivatives of functions. 33 // 34 // While a complete treatment of the mechanics of automatic differentiation is 35 // beyond the scope of this header (see 36 // http://en.wikipedia.org/wiki/Automatic_differentiation for details), the 37 // basic idea is to extend normal arithmetic with an extra element, "e," often 38 // denoted with the greek symbol epsilon, such that e != 0 but e^2 = 0. Dual 39 // numbers are extensions of the real numbers analogous to complex numbers: 40 // whereas complex numbers augment the reals by introducing an imaginary unit i 41 // such that i^2 = -1, dual numbers introduce an "infinitesimal" unit e such 42 // that e^2 = 0. Dual numbers have two components: the "real" component and the 43 // "infinitesimal" component, generally written as x + y*e. Surprisingly, this 44 // leads to a convenient method for computing exact derivatives without needing 45 // to manipulate complicated symbolic expressions. 46 // 47 // For example, consider the function 48 // 49 // f(x) = x^2 , 50 // 51 // evaluated at 10. Using normal arithmetic, f(10) = 100, and df/dx(10) = 20. 52 // Next, argument 10 with an infinitesimal to get: 53 // 54 // f(10 + e) = (10 + e)^2 55 // = 100 + 2 * 10 * e + e^2 56 // = 100 + 20 * e -+- 57 // -- | 58 // | +--- This is zero, since e^2 = 0 59 // | 60 // +----------------- This is df/dx! 61 // 62 // Note that the derivative of f with respect to x is simply the infinitesimal 63 // component of the value of f(x + e). So, in order to take the derivative of 64 // any function, it is only necessary to replace the numeric "object" used in 65 // the function with one extended with infinitesimals. The class Jet, defined in 66 // this header, is one such example of this, where substitution is done with 67 // templates. 68 // 69 // To handle derivatives of functions taking multiple arguments, different 70 // infinitesimals are used, one for each variable to take the derivative of. For 71 // example, consider a scalar function of two scalar parameters x and y: 72 // 73 // f(x, y) = x^2 + x * y 74 // 75 // Following the technique above, to compute the derivatives df/dx and df/dy for 76 // f(1, 3) involves doing two evaluations of f, the first time replacing x with 77 // x + e, the second time replacing y with y + e. 78 // 79 // For df/dx: 80 // 81 // f(1 + e, y) = (1 + e)^2 + (1 + e) * 3 82 // = 1 + 2 * e + 3 + 3 * e 83 // = 4 + 5 * e 84 // 85 // --> df/dx = 5 86 // 87 // For df/dy: 88 // 89 // f(1, 3 + e) = 1^2 + 1 * (3 + e) 90 // = 1 + 3 + e 91 // = 4 + e 92 // 93 // --> df/dy = 1 94 // 95 // To take the gradient of f with the implementation of dual numbers ("jets") in 96 // this file, it is necessary to create a single jet type which has components 97 // for the derivative in x and y, and passing them to a templated version of f: 98 // 99 // template<typename T> 100 // T f(const T &x, const T &y) { 101 // return x * x + x * y; 102 // } 103 // 104 // // The "2" means there should be 2 dual number components. 105 // // It computes the partial derivative at x=10, y=20. 106 // Jet<double, 2> x(10, 0); // Pick the 0th dual number for x. 107 // Jet<double, 2> y(20, 1); // Pick the 1st dual number for y. 108 // Jet<double, 2> z = f(x, y); 109 // 110 // LOG(INFO) << "df/dx = " << z.v[0] 111 // << "df/dy = " << z.v[1]; 112 // 113 // Most users should not use Jet objects directly; a wrapper around Jet objects, 114 // which makes computing the derivative, gradient, or jacobian of templated 115 // functors simple, is in autodiff.h. Even autodiff.h should not be used 116 // directly; instead autodiff_cost_function.h is typically the file of interest. 117 // 118 // For the more mathematically inclined, this file implements first-order 119 // "jets". A 1st order jet is an element of the ring 120 // 121 // T[N] = T[t_1, ..., t_N] / (t_1, ..., t_N)^2 122 // 123 // which essentially means that each jet consists of a "scalar" value 'a' from T 124 // and a 1st order perturbation vector 'v' of length N: 125 // 126 // x = a + sum_i v[i] t_i 127 // 128 // A shorthand is to write an element as x = a + u, where u is the perturbation. 129 // Then, the main point about the arithmetic of jets is that the product of 130 // perturbations is zero: 131 // 132 // (a + u) * (b + v) = ab + av + bu + uv 133 // = ab + (av + bu) + 0 134 // 135 // which is what operator* implements below. Addition is simpler: 136 // 137 // (a + u) + (b + v) = (a + b) + (u + v). 138 // 139 // The only remaining question is how to evaluate the function of a jet, for 140 // which we use the chain rule: 141 // 142 // f(a + u) = f(a) + f'(a) u 143 // 144 // where f'(a) is the (scalar) derivative of f at a. 145 // 146 // By pushing these things through sufficiently and suitably templated 147 // functions, we can do automatic differentiation. Just be sure to turn on 148 // function inlining and common-subexpression elimination, or it will be very 149 // slow! 150 // 151 // WARNING: Most Ceres users should not directly include this file or know the 152 // details of how jets work. Instead the suggested method for automatic 153 // derivatives is to use autodiff_cost_function.h, which is a wrapper around 154 // both jets.h and autodiff.h to make taking derivatives of cost functions for 155 // use in Ceres easier. 156 157 #ifndef CERES_PUBLIC_JET_H_ 158 #define CERES_PUBLIC_JET_H_ 159 160 #include <cmath> 161 #include <iosfwd> 162 #include <iostream> // NOLINT 163 #include <limits> 164 #include <string> 165 166 #include "Eigen/Core" 167 //////#include "ceres/internal/port.h" 168 169 namespace ceres { 170 171 template <typename T, int N> 172 struct Jet { 173 enum { DIMENSION = N }; 174 typedef T Scalar; 175 176 // Default-construct "a" because otherwise this can lead to false errors about 177 // uninitialized uses when other classes relying on default constructed T 178 // (where T is a Jet<T, N>). This usually only happens in opt mode. Note that 179 // the C++ standard mandates that e.g. default constructed doubles are 180 // initialized to 0.0; see sections 8.5 of the C++03 standard. 181 Jet() : a() { 182 v.setZero(); 183 } 184 185 // Constructor from scalar: a + 0. 186 explicit Jet(const T& value) { 187 a = value; 188 v.setZero(); 189 } 190 191 // Constructor from scalar plus variable: a + t_i. 192 Jet(const T& value, int k) { 193 a = value; 194 v.setZero(); 195 v[k] = T(1.0); 196 } 197 198 // Constructor from scalar and vector part 199 // The use of Eigen::DenseBase allows Eigen expressions 200 // to be passed in without being fully evaluated until 201 // they are assigned to v 202 template<typename Derived> 203 EIGEN_STRONG_INLINE Jet(const T& a, const Eigen::DenseBase<Derived> &v) 204 : a(a), v(v) { 205 } 206 207 // Compound operators 208 Jet<T, N>& operator+=(const Jet<T, N> &y) { 209 *this = *this + y; 210 return *this; 211 } 212 213 Jet<T, N>& operator-=(const Jet<T, N> &y) { 214 *this = *this - y; 215 return *this; 216 } 217 218 Jet<T, N>& operator*=(const Jet<T, N> &y) { 219 *this = *this * y; 220 return *this; 221 } 222 223 Jet<T, N>& operator/=(const Jet<T, N> &y) { 224 *this = *this / y; 225 return *this; 226 } 227 228 // Compound with scalar operators. 229 Jet<T, N>& operator+=(const T& s) { 230 *this = *this + s; 231 return *this; 232 } 233 234 Jet<T, N>& operator-=(const T& s) { 235 *this = *this - s; 236 return *this; 237 } 238 239 Jet<T, N>& operator*=(const T& s) { 240 *this = *this * s; 241 return *this; 242 } 243 244 Jet<T, N>& operator/=(const T& s) { 245 *this = *this / s; 246 return *this; 247 } 248 249 // The scalar part. 250 T a; 251 252 // The infinitesimal part. 253 // 254 // We allocate Jets on the stack and other places they might not be aligned 255 // to X(=16 [SSE], 32 [AVX] etc)-byte boundaries, which would prevent the safe 256 // use of vectorisation. If we have C++11, we can specify the alignment. 257 // However, the standard gives wide latitude as to what alignments are valid, 258 // and it might be that the maximum supported alignment *guaranteed* to be 259 // supported is < 16, in which case we do not specify an alignment, as this 260 // implies the host is not a modern x86 machine. If using < C++11, we cannot 261 // specify alignment. 262 263 #if defined(EIGEN_DONT_VECTORIZE) 264 Eigen::Matrix<T, N, 1, Eigen::DontAlign> v; 265 #else 266 // Enable vectorisation iff the maximum supported scalar alignment is >= 267 // 16 bytes, as this is the minimum required by Eigen for any vectorisation. 268 // 269 // NOTE: It might be the case that we could get >= 16-byte alignment even if 270 // max_align_t < 16. However we can't guarantee that this 271 // would happen (and it should not for any modern x86 machine) and if it 272 // didn't, we could get misaligned Jets. 273 static constexpr int kAlignOrNot = 274 // Work around a GCC 4.8 bug 275 // (https://gcc.gnu.org/bugzilla/show_bug.cgi?id=56019) where 276 // std::max_align_t is misplaced. 277 #if defined (__GNUC__) && __GNUC__ == 4 && __GNUC_MINOR__ == 8 278 alignof(::max_align_t) >= 16 279 #else 280 alignof(std::max_align_t) >= 16 281 #endif 282 ? Eigen::AutoAlign : Eigen::DontAlign; 283 284 #if defined(EIGEN_MAX_ALIGN_BYTES) 285 // Eigen >= 3.3 supports AVX & FMA instructions that require 32-byte alignment 286 // (greater for AVX512). Rather than duplicating the detection logic, use 287 // Eigen's macro for the alignment size. 288 // 289 // NOTE: EIGEN_MAX_ALIGN_BYTES can be > 16 (e.g. 32 for AVX), even though 290 // kMaxAlignBytes will max out at 16. We are therefore relying on 291 // Eigen's detection logic to ensure that this does not result in 292 // misaligned Jets. 293 #define CERES_JET_ALIGN_BYTES EIGEN_MAX_ALIGN_BYTES 294 #else 295 // Eigen < 3.3 only supported 16-byte alignment. 296 #define CERES_JET_ALIGN_BYTES 16 297 #endif 298 299 // Default to the native alignment if 16-byte alignment is not guaranteed to 300 // be supported. We cannot use alignof(T) as if we do, GCC 4.8 complains that 301 // the alignment 'is not an integer constant', although Clang accepts it. 302 static constexpr size_t kAlignment = kAlignOrNot == Eigen::AutoAlign 303 ? CERES_JET_ALIGN_BYTES : alignof(double); 304 305 #undef CERES_JET_ALIGN_BYTES 306 alignas(kAlignment)Eigen::Matrix<T, N, 1, kAlignOrNot> v; 307 #endif 308 }; 309 310 // Unary + 311 template<typename T, int N> inline 312 Jet<T, N> const& operator+(const Jet<T, N>& f) { 313 return f; 314 } 315 316 // TODO(keir): Try adding __attribute__((always_inline)) to these functions to 317 // see if it causes a performance increase. 318 319 // Unary - 320 template<typename T, int N> inline 321 Jet<T, N> operator-(const Jet<T, N>&f) { 322 return Jet<T, N>(-f.a, -f.v); 323 } 324 325 // Binary + 326 template<typename T, int N> inline 327 Jet<T, N> operator+(const Jet<T, N>& f, 328 const Jet<T, N>& g) { 329 return Jet<T, N>(f.a + g.a, f.v + g.v); 330 } 331 332 // Binary + with a scalar: x + s 333 template<typename T, int N> inline 334 Jet<T, N> operator+(const Jet<T, N>& f, T s) { 335 return Jet<T, N>(f.a + s, f.v); 336 } 337 338 // Binary + with a scalar: s + x 339 template<typename T, int N> inline 340 Jet<T, N> operator+(T s, const Jet<T, N>& f) { 341 return Jet<T, N>(f.a + s, f.v); 342 } 343 344 // Binary - 345 template<typename T, int N> inline 346 Jet<T, N> operator-(const Jet<T, N>& f, 347 const Jet<T, N>& g) { 348 return Jet<T, N>(f.a - g.a, f.v - g.v); 349 } 350 351 // Binary - with a scalar: x - s 352 template<typename T, int N> inline 353 Jet<T, N> operator-(const Jet<T, N>& f, T s) { 354 return Jet<T, N>(f.a - s, f.v); 355 } 356 357 // Binary - with a scalar: s - x 358 template<typename T, int N> inline 359 Jet<T, N> operator-(T s, const Jet<T, N>& f) { 360 return Jet<T, N>(s - f.a, -f.v); 361 } 362 363 // Binary * 364 template<typename T, int N> inline 365 Jet<T, N> operator*(const Jet<T, N>& f, 366 const Jet<T, N>& g) { 367 return Jet<T, N>(f.a * g.a, f.a * g.v + f.v * g.a); 368 } 369 370 // Binary * with a scalar: x * s 371 template<typename T, int N> inline 372 Jet<T, N> operator*(const Jet<T, N>& f, T s) { 373 return Jet<T, N>(f.a * s, f.v * s); 374 } 375 376 // Binary * with a scalar: s * x 377 template<typename T, int N> inline 378 Jet<T, N> operator*(T s, const Jet<T, N>& f) { 379 return Jet<T, N>(f.a * s, f.v * s); 380 } 381 382 // Binary / 383 template<typename T, int N> inline 384 Jet<T, N> operator/(const Jet<T, N>& f, 385 const Jet<T, N>& g) { 386 // This uses: 387 // 388 // a + u (a + u)(b - v) (a + u)(b - v) 389 // ----- = -------------- = -------------- 390 // b + v (b + v)(b - v) b^2 391 // 392 // which holds because v*v = 0. 393 const T g_a_inverse = T(1.0) / g.a; 394 const T f_a_by_g_a = f.a * g_a_inverse; 395 return Jet<T, N>(f_a_by_g_a, (f.v - f_a_by_g_a * g.v) * g_a_inverse); 396 } 397 398 // Binary / with a scalar: s / x 399 template<typename T, int N> inline 400 Jet<T, N> operator/(T s, const Jet<T, N>& g) { 401 const T minus_s_g_a_inverse2 = -s / (g.a * g.a); 402 return Jet<T, N>(s / g.a, g.v * minus_s_g_a_inverse2); 403 } 404 405 // Binary / with a scalar: x / s 406 template<typename T, int N> inline 407 Jet<T, N> operator/(const Jet<T, N>& f, T s) { 408 const T s_inverse = T(1.0) / s; 409 return Jet<T, N>(f.a * s_inverse, f.v * s_inverse); 410 } 411 412 // Binary comparison operators for both scalars and jets. 413 #define CERES_DEFINE_JET_COMPARISON_OPERATOR(op) 414 template<typename T, int N> inline 415 bool operator op(const Jet<T, N>& f, const Jet<T, N>& g) { 416 return f.a op g.a; 417 } 418 template<typename T, int N> inline 419 bool operator op(const T& s, const Jet<T, N>& g) { 420 return s op g.a; 421 } 422 template<typename T, int N> inline 423 bool operator op(const Jet<T, N>& f, const T& s) { 424 return f.a op s; 425 } 426 CERES_DEFINE_JET_COMPARISON_OPERATOR(< ) // NOLINT 427 CERES_DEFINE_JET_COMPARISON_OPERATOR(<= ) // NOLINT 428 CERES_DEFINE_JET_COMPARISON_OPERATOR(> ) // NOLINT 429 CERES_DEFINE_JET_COMPARISON_OPERATOR(>= ) // NOLINT 430 CERES_DEFINE_JET_COMPARISON_OPERATOR(== ) // NOLINT 431 CERES_DEFINE_JET_COMPARISON_OPERATOR(!= ) // NOLINT 432 #undef CERES_DEFINE_JET_COMPARISON_OPERATOR 433 434 // Pull some functions from namespace std. 435 // 436 // This is necessary because we want to use the same name (e.g. 'sqrt') for 437 // double-valued and Jet-valued functions, but we are not allowed to put 438 // Jet-valued functions inside namespace std. 439 using std::abs; 440 using std::acos; 441 using std::asin; 442 using std::atan; 443 using std::atan2; 444 using std::cbrt; 445 using std::ceil; 446 using std::cos; 447 using std::cosh; 448 using std::exp; 449 using std::exp2; 450 using std::floor; 451 using std::fmax; 452 using std::fmin; 453 using std::hypot; 454 using std::isfinite; 455 using std::isinf; 456 using std::isnan; 457 using std::isnormal; 458 using std::log; 459 using std::log2; 460 using std::pow; 461 using std::sin; 462 using std::sinh; 463 using std::sqrt; 464 using std::tan; 465 using std::tanh; 466 467 // Legacy names from pre-C++11 days. 468 inline bool IsFinite(double x) { return std::isfinite(x); } 469 inline bool IsInfinite(double x) { return std::isinf(x); } 470 inline bool IsNaN(double x) { return std::isnan(x); } 471 inline bool IsNormal(double x) { return std::isnormal(x); } 472 473 // In general, f(a + h) ~= f(a) + f'(a) h, via the chain rule. 474 475 // abs(x + h) ~= x + h or -(x + h) 476 template <typename T, int N> inline 477 Jet<T, N> abs(const Jet<T, N>& f) { 478 return f.a < T(0.0) ? -f : f; 479 } 480 481 // log(a + h) ~= log(a) + h / a 482 template <typename T, int N> inline 483 Jet<T, N> log(const Jet<T, N>& f) { 484 const T a_inverse = T(1.0) / f.a; 485 return Jet<T, N>(log(f.a), f.v * a_inverse); 486 } 487 488 // exp(a + h) ~= exp(a) + exp(a) h 489 template <typename T, int N> inline 490 Jet<T, N> exp(const Jet<T, N>& f) { 491 const T tmp = exp(f.a); 492 return Jet<T, N>(tmp, tmp * f.v); 493 } 494 495 // sqrt(a + h) ~= sqrt(a) + h / (2 sqrt(a)) 496 template <typename T, int N> inline 497 Jet<T, N> sqrt(const Jet<T, N>& f) { 498 const T tmp = sqrt(f.a); 499 const T two_a_inverse = T(1.0) / (T(2.0) * tmp); 500 return Jet<T, N>(tmp, f.v * two_a_inverse); 501 } 502 503 // cos(a + h) ~= cos(a) - sin(a) h 504 template <typename T, int N> inline 505 Jet<T, N> cos(const Jet<T, N>& f) { 506 return Jet<T, N>(cos(f.a), -sin(f.a) * f.v); 507 } 508 509 // acos(a + h) ~= acos(a) - 1 / sqrt(1 - a^2) h 510 template <typename T, int N> inline 511 Jet<T, N> acos(const Jet<T, N>& f) { 512 const T tmp = -T(1.0) / sqrt(T(1.0) - f.a * f.a); 513 return Jet<T, N>(acos(f.a), tmp * f.v); 514 } 515 516 // sin(a + h) ~= sin(a) + cos(a) h 517 template <typename T, int N> inline 518 Jet<T, N> sin(const Jet<T, N>& f) { 519 return Jet<T, N>(sin(f.a), cos(f.a) * f.v); 520 } 521 522 // asin(a + h) ~= asin(a) + 1 / sqrt(1 - a^2) h 523 template <typename T, int N> inline 524 Jet<T, N> asin(const Jet<T, N>& f) { 525 const T tmp = T(1.0) / sqrt(T(1.0) - f.a * f.a); 526 return Jet<T, N>(asin(f.a), tmp * f.v); 527 } 528 529 // tan(a + h) ~= tan(a) + (1 + tan(a)^2) h 530 template <typename T, int N> inline 531 Jet<T, N> tan(const Jet<T, N>& f) { 532 const T tan_a = tan(f.a); 533 const T tmp = T(1.0) + tan_a * tan_a; 534 return Jet<T, N>(tan_a, tmp * f.v); 535 } 536 537 // atan(a + h) ~= atan(a) + 1 / (1 + a^2) h 538 template <typename T, int N> inline 539 Jet<T, N> atan(const Jet<T, N>& f) { 540 const T tmp = T(1.0) / (T(1.0) + f.a * f.a); 541 return Jet<T, N>(atan(f.a), tmp * f.v); 542 } 543 544 // sinh(a + h) ~= sinh(a) + cosh(a) h 545 template <typename T, int N> inline 546 Jet<T, N> sinh(const Jet<T, N>& f) { 547 return Jet<T, N>(sinh(f.a), cosh(f.a) * f.v); 548 } 549 550 // cosh(a + h) ~= cosh(a) + sinh(a) h 551 template <typename T, int N> inline 552 Jet<T, N> cosh(const Jet<T, N>& f) { 553 return Jet<T, N>(cosh(f.a), sinh(f.a) * f.v); 554 } 555 556 // tanh(a + h) ~= tanh(a) + (1 - tanh(a)^2) h 557 template <typename T, int N> inline 558 Jet<T, N> tanh(const Jet<T, N>& f) { 559 const T tanh_a = tanh(f.a); 560 const T tmp = T(1.0) - tanh_a * tanh_a; 561 return Jet<T, N>(tanh_a, tmp * f.v); 562 } 563 564 // The floor function should be used with extreme care as this operation will 565 // result in a zero derivative which provides no information to the solver. 566 // 567 // floor(a + h) ~= floor(a) + 0 568 template <typename T, int N> inline 569 Jet<T, N> floor(const Jet<T, N>& f) { 570 return Jet<T, N>(floor(f.a)); 571 } 572 573 // The ceil function should be used with extreme care as this operation will 574 // result in a zero derivative which provides no information to the solver. 575 // 576 // ceil(a + h) ~= ceil(a) + 0 577 template <typename T, int N> inline 578 Jet<T, N> ceil(const Jet<T, N>& f) { 579 return Jet<T, N>(ceil(f.a)); 580 } 581 582 // Some new additions to C++11: 583 584 // cbrt(a + h) ~= cbrt(a) + h / (3 a ^ (2/3)) 585 template <typename T, int N> inline 586 Jet<T, N> cbrt(const Jet<T, N>& f) { 587 const T derivative = T(1.0) / (T(3.0) * cbrt(f.a * f.a)); 588 return Jet<T, N>(cbrt(f.a), f.v * derivative); 589 } 590 591 // exp2(x + h) = 2^(x+h) ~= 2^x + h*2^x*log(2) 592 template <typename T, int N> inline 593 Jet<T, N> exp2(const Jet<T, N>& f) { 594 const T tmp = exp2(f.a); 595 const T derivative = tmp * log(T(2)); 596 return Jet<T, N>(tmp, f.v * derivative); 597 } 598 599 // log2(x + h) ~= log2(x) + h / (x * log(2)) 600 template <typename T, int N> inline 601 Jet<T, N> log2(const Jet<T, N>& f) { 602 const T derivative = T(1.0) / (f.a * log(T(2))); 603 return Jet<T, N>(log2(f.a), f.v * derivative); 604 } 605 606 // Like sqrt(x^2 + y^2), 607 // but acts to prevent underflow/overflow for small/large x/y. 608 // Note that the function is non-smooth at x=y=0, 609 // so the derivative is undefined there. 610 template <typename T, int N> inline 611 Jet<T, N> hypot(const Jet<T, N>& x, const Jet<T, N>& y) { 612 // d/da sqrt(a) = 0.5 / sqrt(a) 613 // d/dx x^2 + y^2 = 2x 614 // So by the chain rule: 615 // d/dx sqrt(x^2 + y^2) = 0.5 / sqrt(x^2 + y^2) * 2x = x / sqrt(x^2 + y^2) 616 // d/dy sqrt(x^2 + y^2) = y / sqrt(x^2 + y^2) 617 const T tmp = hypot(x.a, y.a); 618 return Jet<T, N>(tmp, x.a / tmp * x.v + y.a / tmp * y.v); 619 } 620 621 template <typename T, int N> inline 622 const Jet<T, N>& fmax(const Jet<T, N>& x, const Jet<T, N>& y) { 623 return x < y ? y : x; 624 } 625 626 template <typename T, int N> inline 627 const Jet<T, N>& fmin(const Jet<T, N>& x, const Jet<T, N>& y) { 628 return y < x ? y : x; 629 } 630 631 // Bessel functions of the first kind with integer order equal to 0, 1, n. 632 // 633 // Microsoft has deprecated the j[0,1,n]() POSIX Bessel functions in favour of 634 // _j[0,1,n](). Where available on MSVC, use _j[0,1,n]() to avoid deprecated 635 // function errors in client code (the specific warning is suppressed when 636 // Ceres itself is built). 637 inline double BesselJ0(double x) { 638 #if defined(CERES_MSVC_USE_UNDERSCORE_PREFIXED_BESSEL_FUNCTIONS) 639 return _j0(x); 640 #else 641 return j0(x); 642 #endif 643 } 644 inline double BesselJ1(double x) { 645 #if defined(CERES_MSVC_USE_UNDERSCORE_PREFIXED_BESSEL_FUNCTIONS) 646 return _j1(x); 647 #else 648 return j1(x); 649 #endif 650 } 651 inline double BesselJn(int n, double x) { 652 #if defined(CERES_MSVC_USE_UNDERSCORE_PREFIXED_BESSEL_FUNCTIONS) 653 return _jn(n, x); 654 #else 655 return jn(n, x); 656 #endif 657 } 658 659 // For the formulae of the derivatives of the Bessel functions see the book: 660 // Olver, Lozier, Boisvert, Clark, NIST Handbook of Mathematical Functions, 661 // Cambridge University Press 2010. 662 // 663 // Formulae are also available at http://dlmf.nist.gov 664 665 // See formula http://dlmf.nist.gov/10.6#E3 666 // j0(a + h) ~= j0(a) - j1(a) h 667 template <typename T, int N> inline 668 Jet<T, N> BesselJ0(const Jet<T, N>& f) { 669 return Jet<T, N>(BesselJ0(f.a), 670 -BesselJ1(f.a) * f.v); 671 } 672 673 // See formula http://dlmf.nist.gov/10.6#E1 674 // j1(a + h) ~= j1(a) + 0.5 ( j0(a) - j2(a) ) h 675 template <typename T, int N> inline 676 Jet<T, N> BesselJ1(const Jet<T, N>& f) { 677 return Jet<T, N>(BesselJ1(f.a), 678 T(0.5) * (BesselJ0(f.a) - BesselJn(2, f.a)) * f.v); 679 } 680 681 // See formula http://dlmf.nist.gov/10.6#E1 682 // j_n(a + h) ~= j_n(a) + 0.5 ( j_{n-1}(a) - j_{n+1}(a) ) h 683 template <typename T, int N> inline 684 Jet<T, N> BesselJn(int n, const Jet<T, N>& f) { 685 return Jet<T, N>(BesselJn(n, f.a), 686 T(0.5) * (BesselJn(n - 1, f.a) - BesselJn(n + 1, f.a)) * f.v); 687 } 688 689 // Jet Classification. It is not clear what the appropriate semantics are for 690 // these classifications. This picks that std::isfinite and std::isnormal are "all" 691 // operations, i.e. all elements of the jet must be finite for the jet itself 692 // to be finite (or normal). For IsNaN and IsInfinite, the answer is less 693 // clear. This takes a "any" approach for IsNaN and IsInfinite such that if any 694 // part of a jet is nan or inf, then the entire jet is nan or inf. This leads 695 // to strange situations like a jet can be both IsInfinite and IsNaN, but in 696 // practice the "any" semantics are the most useful for e.g. checking that 697 // derivatives are sane. 698 699 // The jet is finite if all parts of the jet are finite. 700 template <typename T, int N> inline 701 bool isfinite(const Jet<T, N>& f) { 702 if (!std::isfinite(f.a)) { 703 return false; 704 } 705 for (int i = 0; i < N; ++i) { 706 if (!std::isfinite(f.v[i])) { 707 return false; 708 } 709 } 710 return true; 711 } 712 713 // The jet is infinite if any part of the Jet is infinite. 714 template <typename T, int N> inline 715 bool isinf(const Jet<T, N>& f) { 716 if (std::isinf(f.a)) { 717 return true; 718 } 719 for (int i = 0; i < N; ++i) { 720 if (std::isinf(f.v[i])) { 721 return true; 722 } 723 } 724 return false; 725 } 726 727 728 // The jet is NaN if any part of the jet is NaN. 729 template <typename T, int N> inline 730 bool isnan(const Jet<T, N>& f) { 731 if (std::isnan(f.a)) { 732 return true; 733 } 734 for (int i = 0; i < N; ++i) { 735 if (std::isnan(f.v[i])) { 736 return true; 737 } 738 } 739 return false; 740 } 741 742 // The jet is normal if all parts of the jet are normal. 743 template <typename T, int N> inline 744 bool isnormal(const Jet<T, N>& f) { 745 if (!std::isnormal(f.a)) { 746 return false; 747 } 748 for (int i = 0; i < N; ++i) { 749 if (!std::isnormal(f.v[i])) { 750 return false; 751 } 752 } 753 return true; 754 } 755 756 // Legacy functions from the pre-C++11 days. 757 template <typename T, int N> 758 inline bool IsFinite(const Jet<T, N>& f) { 759 return isfinite(f); 760 } 761 762 template <typename T, int N> 763 inline bool IsNaN(const Jet<T, N>& f) { 764 return isnan(f); 765 } 766 767 template <typename T, int N> 768 inline bool IsNormal(const Jet<T, N>& f) { 769 return isnormal(f); 770 } 771 772 // The jet is infinite if any part of the jet is infinite. 773 template <typename T, int N> inline 774 bool IsInfinite(const Jet<T, N>& f) { 775 return isinf(f); 776 } 777 778 // atan2(b + db, a + da) ~= atan2(b, a) + (- b da + a db) / (a^2 + b^2) 779 // 780 // In words: the rate of change of theta is 1/r times the rate of 781 // change of (x, y) in the positive angular direction. 782 template <typename T, int N> inline 783 Jet<T, N> atan2(const Jet<T, N>& g, const Jet<T, N>& f) { 784 // Note order of arguments: 785 // 786 // f = a + da 787 // g = b + db 788 789 T const tmp = T(1.0) / (f.a * f.a + g.a * g.a); 790 return Jet<T, N>(atan2(g.a, f.a), tmp * (-g.a * f.v + f.a * g.v)); 791 } 792 793 794 // pow -- base is a differentiable function, exponent is a constant. 795 // (a+da)^p ~= a^p + p*a^(p-1) da 796 template <typename T, int N> inline 797 Jet<T, N> pow(const Jet<T, N>& f, double g) { 798 T const tmp = g * pow(f.a, g - T(1.0)); 799 return Jet<T, N>(pow(f.a, g), tmp * f.v); 800 } 801 802 // pow -- base is a constant, exponent is a differentiable function. 803 // We have various special cases, see the comment for pow(Jet, Jet) for 804 // analysis: 805 // 806 // 1. For f > 0 we have: (f)^(g + dg) ~= f^g + f^g log(f) dg 807 // 808 // 2. For f == 0 and g > 0 we have: (f)^(g + dg) ~= f^g 809 // 810 // 3. For f < 0 and integer g we have: (f)^(g + dg) ~= f^g but if dg 811 // != 0, the derivatives are not defined and we return NaN. 812 813 template <typename T, int N> inline 814 Jet<T, N> pow(double f, const Jet<T, N>& g) { 815 if (f == 0 && g.a > 0) { 816 // Handle case 2. 817 return Jet<T, N>(T(0.0)); 818 } 819 if (f < 0 && g.a == floor(g.a)) { 820 // Handle case 3. 821 Jet<T, N> ret(pow(f, g.a)); 822 for (int i = 0; i < N; i++) { 823 if (g.v[i] != T(0.0)) { 824 // Return a NaN when g.v != 0. 825 ret.v[i] = std::numeric_limits<T>::quiet_NaN(); 826 } 827 } 828 return ret; 829 } 830 // Handle case 1. 831 T const tmp = pow(f, g.a); 832 return Jet<T, N>(tmp, log(f) * tmp * g.v); 833 } 834 835 // pow -- both base and exponent are differentiable functions. This has a 836 // variety of special cases that require careful handling. 837 // 838 // 1. For f > 0: 839 // (f + df)^(g + dg) ~= f^g + f^(g - 1) * (g * df + f * log(f) * dg) 840 // The numerical evaluation of f * log(f) for f > 0 is well behaved, even for 841 // extremely small values (e.g. 1e-99). 842 // 843 // 2. For f == 0 and g > 1: (f + df)^(g + dg) ~= 0 844 // This cases is needed because log(0) can not be evaluated in the f > 0 845 // expression. However the function f*log(f) is well behaved around f == 0 846 // and its limit as f-->0 is zero. 847 // 848 // 3. For f == 0 and g == 1: (f + df)^(g + dg) ~= 0 + df 849 // 850 // 4. For f == 0 and 0 < g < 1: The value is finite but the derivatives are not. 851 // 852 // 5. For f == 0 and g < 0: The value and derivatives of f^g are not finite. 853 // 854 // 6. For f == 0 and g == 0: The C standard incorrectly defines 0^0 to be 1 855 // "because there are applications that can exploit this definition". We 856 // (arbitrarily) decree that derivatives here will be nonfinite, since that 857 // is consistent with the behavior for f == 0, g < 0 and 0 < g < 1. 858 // Practically any definition could have been justified because mathematical 859 // consistency has been lost at this point. 860 // 861 // 7. For f < 0, g integer, dg == 0: (f + df)^(g + dg) ~= f^g + g * f^(g - 1) df 862 // This is equivalent to the case where f is a differentiable function and g 863 // is a constant (to first order). 864 // 865 // 8. For f < 0, g integer, dg != 0: The value is finite but the derivatives are 866 // not, because any change in the value of g moves us away from the point 867 // with a real-valued answer into the region with complex-valued answers. 868 // 869 // 9. For f < 0, g noninteger: The value and derivatives of f^g are not finite. 870 871 template <typename T, int N> inline 872 Jet<T, N> pow(const Jet<T, N>& f, const Jet<T, N>& g) { 873 if (f.a == 0 && g.a >= 1) { 874 // Handle cases 2 and 3. 875 if (g.a > 1) { 876 return Jet<T, N>(T(0.0)); 877 } 878 return f; 879 } 880 if (f.a < 0 && g.a == floor(g.a)) { 881 // Handle cases 7 and 8. 882 T const tmp = g.a * pow(f.a, g.a - T(1.0)); 883 Jet<T, N> ret(pow(f.a, g.a), tmp * f.v); 884 for (int i = 0; i < N; i++) { 885 if (g.v[i] != T(0.0)) { 886 // Return a NaN when g.v != 0. 887 ret.v[i] = std::numeric_limits<T>::quiet_NaN(); 888 } 889 } 890 return ret; 891 } 892 // Handle the remaining cases. For cases 4,5,6,9 we allow the log() function 893 // to generate -HUGE_VAL or NaN, since those cases result in a nonfinite 894 // derivative. 895 T const tmp1 = pow(f.a, g.a); 896 T const tmp2 = g.a * pow(f.a, g.a - T(1.0)); 897 T const tmp3 = tmp1 * log(f.a); 898 return Jet<T, N>(tmp1, tmp2 * f.v + tmp3 * g.v); 899 } 900 901 // Note: This has to be in the ceres namespace for argument dependent lookup to 902 // function correctly. Otherwise statements like CHECK_LE(x, 2.0) fail with 903 // strange compile errors. 904 template <typename T, int N> 905 inline std::ostream &operator<<(std::ostream &s, const Jet<T, N>& z) { 906 s << "[" << z.a << " ; "; 907 for (int i = 0; i < N; ++i) { 908 s << z.v[i]; 909 if (i != N - 1) { 910 s << ", "; 911 } 912 } 913 s << "]"; 914 return s; 915 } 916 917 } // namespace ceres 918 919 namespace Eigen { 920 921 // Creating a specialization of NumTraits enables placing Jet objects inside 922 // Eigen arrays, getting all the goodness of Eigen combined with autodiff. 923 template<typename T, int N> 924 struct NumTraits<ceres::Jet<T, N>> { 925 typedef ceres::Jet<T, N> Real; 926 typedef ceres::Jet<T, N> NonInteger; 927 typedef ceres::Jet<T, N> Nested; 928 typedef ceres::Jet<T, N> Literal; 929 930 static typename ceres::Jet<T, N> dummy_precision() { 931 return ceres::Jet<T, N>(1e-12); 932 } 933 934 static inline Real epsilon() { 935 return Real(std::numeric_limits<T>::epsilon()); 936 } 937 938 static inline int digits10() { return NumTraits<T>::digits10(); } 939 940 enum { 941 IsComplex = 0, 942 IsInteger = 0, 943 IsSigned, 944 ReadCost = 1, 945 AddCost = 1, 946 // For Jet types, multiplication is more expensive than addition. 947 MulCost = 3, 948 HasFloatingPoint = 1, 949 RequireInitialization = 1 950 }; 951 952 template<bool Vectorized> 953 struct Div { 954 enum { 955 #if defined(EIGEN_VECTORIZE_AVX) 956 AVX = true, 957 #else 958 AVX = false, 959 #endif 960 961 // Assuming that for Jets, division is as expensive as 962 // multiplication. 963 Cost = 3 964 }; 965 }; 966 967 static inline Real highest() { return Real(std::numeric_limits<T>::max()); } 968 static inline Real lowest() { return Real(-std::numeric_limits<T>::max()); } 969 }; 970 971 #if EIGEN_VERSION_AT_LEAST(3, 3, 0) 972 // Specifying the return type of binary operations between Jets and scalar types 973 // allows you to perform matrix/array operations with Eigen matrices and arrays 974 // such as addition, subtraction, multiplication, and division where one Eigen 975 // matrix/array is of type Jet and the other is a scalar type. This improves 976 // performance by using the optimized scalar-to-Jet binary operations but 977 // is only available on Eigen versions >= 3.3 978 template <typename BinaryOp, typename T, int N> 979 struct ScalarBinaryOpTraits<ceres::Jet<T, N>, T, BinaryOp> { 980 typedef ceres::Jet<T, N> ReturnType; 981 }; 982 template <typename BinaryOp, typename T, int N> 983 struct ScalarBinaryOpTraits<T, ceres::Jet<T, N>, BinaryOp> { 984 typedef ceres::Jet<T, N> ReturnType; 985 }; 986 #endif // EIGEN_VERSION_AT_LEAST(3, 3, 0) 987 988 } // namespace Eigen 989 990 #endif // CERES_PUBLIC_JET_H_