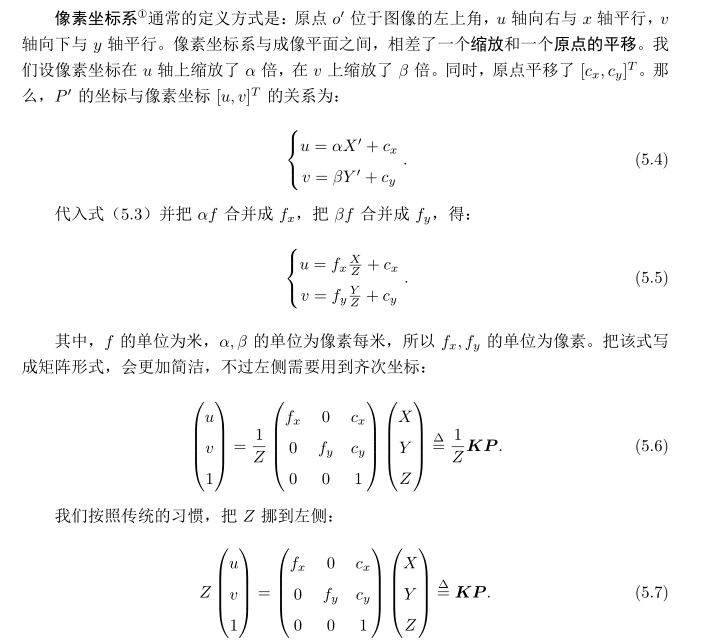
其中矩阵K称为相机的内参矩阵
由透镜形状引起的畸变称为径向畸变,分为桶形畸变和枕形畸变。
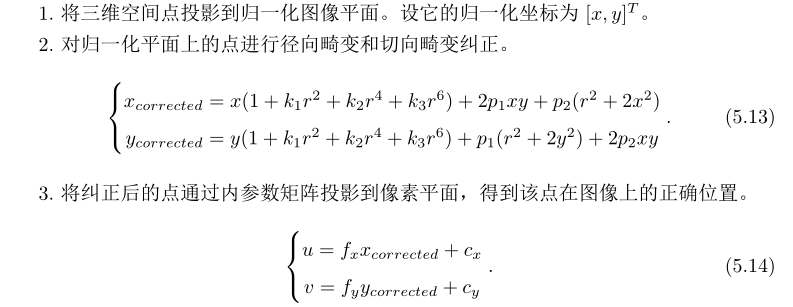
相机组装中透镜和成像面不平行引起的畸变称为切向畸变。
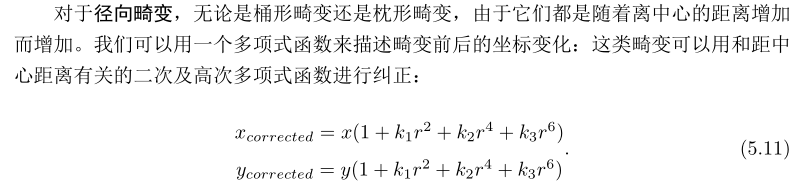

式5-11和5-12中的x,y表示归一化平面上的点坐标。
因此,联合式5-11和5-12,对于相机坐标系下的一点P(X,Y,Z),可以通过五个畸变系数找到这个点在像素平面上的正确位置。
双目相机模型

在左右双目相机中,两相机水平放置,它们之间的距离称为双目相机的基线b,是双目的重要参数。

d称为相机的视差,根据视差可以估计一个像素离相机的距离,视差越大,距离越近;基线越长,双目能测的距离越远。