本节主要学习:
详细分析UBOOT中"bootcmd=nand read.jffs2 0x30007FC0 kernel;bootm 0x30007FC0"
中怎么实现bootm命令启动内核.
其中bootm要做的事情:
a 读取头部,把内核拷贝到合适的地方(0X30008000)
b 在do_boom_linux()中把参数给内核准备好,并告诉内核参数的首地址
c 在do_boom_linux()中最后使用theKernel () 引导内核.
{注意:当在cmd_bootm.C中没有定义宏CONFIG_PPC时,
系统使用./lib_arm/armlinux.C下的do_bootm_linux()函数(本uboot使用的是这个函数).
若定义了该宏,系统会使用./common/cmd_bootm.C下的do_bootm_linux()函数.}
1. bootm 0x30007FC0
为什么这里是从0x30007FC0启动?
因为Flash上存的内核格式是:uImage
而uiamge由: 头部(header) + 真正的内核 组成
在下面1.1节中讲到头部占用了64B字节,用来存放各个参数变量,所以真正的内核加载地址是在:
真正的内核开始地址=0x30007FC0+64=0X30008000,所以bootm启动内核地址刚好位于nand命令加载的地址后面,不需要移动
1.1 uImage头部结构体分析
头部:由结构体image_header_t定义,该结构体大小为64B,位于./include/image.h
typedef struct image_header { uint32_t ih_magic; /* Image Header Magic Number(镜像头部幻数,为#define IH_MAGIC 0x27051956 ) */ //幻数:用来标记文件的格式 uint32_t ih_hcrc; /* Image Header CRC Checksum(镜像头部CRC校验码) */ uint32_t ih_time; /* Image Creation Timestamp(镜像创建时间戳)*/ uint32_t ih_size; /* Image Data Size(镜像数据大小(不算头部) ) */ uint32_t ih_load; /* Data Load Address(镜像数据将要载入的内存地址) */ uint32_t ih_ep; /* Entry Point Address(镜像入口地址) */ uint32_t ih_dcrc; /* Image Data CRC Checksum(镜像数据CRC校验码) */ uint8_t ih_os; /* Operating System(操作系统类型) */ uint8_t ih_arch; /* CPU architecture(CPU架构) */ uint8_t ih_type; /* Image Type(镜像类型) */ uint8_t ih_comp; /* Compression Type(压缩类型) */ uint8_t ih_name[IH_NMLEN]; /* Image Name(镜像名字ih_name,共32字节 #define IH_NMLEN 32) */ } image_header_t;
1.2 bootm命令之do_bootm函数分析 (bootm命令位于./common/cmd_bootm.c,其中nand命令执行时调用的是do_bootm()函数)
int do_bootm (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[]) { ulong iflag; ulong addr; ulong data, len, checksum; ulong *len_ptr; uint unc_len = CFG_BOOTM_LEN; int i, verify; char *name, *s; int (*appl)(int, char *[]); image_header_t *hdr = &header; //定义头部结构体指针hdr等于header的地址. s = getenv ("verify"); //读取uboot环境变量verify verify = (s && (*s == 'n')) ? 0 : 1; //如果verify==n,局部变量verify=0,否则verify=1. if (argc < 2) { //如果argc==1(只输入了bootm),则使用缺省加载地址load_addr addr = load_addr; } else { //否则使用argv[1](0x30007FC0)为加载地址 addr = simple_strtoul(argv[1], NULL, 16); } SHOW_BOOT_PROGRESS (1); printf ("## Booting image at %08lx ... ", addr); //打印"## Booting image at 0x30007FC0 ... " #ifdef CONFIG_HAS_DATAFLASH if (addr_dataflash(addr)){ read_dataflash(addr, sizeof(image_header_t), (char *)&header); } else #endif memmove (&header, (char *)addr, sizeof(image_header_t)); //在加载地址中前64B大小的头部结构体提取到image_header_t结构变量header中,为下面的分析校验做准备 if (ntohl(hdr->ih_magic) != IH_MAGIC) //判断幻数Magic number 是否匹配,不匹配说明下载过程中错误. { ... } else #endif /* __I386__ */ { puts ("Bad Magic Number "); SHOW_BOOT_PROGRESS (-1); return 1; } } SHOW_BOOT_PROGRESS (2); data = (ulong)&header; len = sizeof(image_header_t); checksum = ntohl(hdr->ih_hcrc); hdr->ih_hcrc = 0; if (crc32 (0, (uchar *)data , len) != checksum) { //判断校验和 puts ("Bad Header Checksum "); SHOW_BOOT_PROGRESS (-2); return 1; } SHOW_BOOT_PROGRESS (3); .... #if defined(__PPC__) //判断体系结构,校验CPU类型是否正确 if (hdr->ih_arch != IH_CPU_PPC) #elif defined(__ARM__) if (hdr->ih_arch != IH_CPU_ARM) #elif defined(__I386__) if (hdr->ih_arch != IH_CPU_I386) #elif defined(__mips__) if (hdr->ih_arch != IH_CPU_MIPS) #elif defined(__nios__) if (hdr->ih_arch != IH_CPU_NIOS) #elif defined(__M68K__) if (hdr->ih_arch != IH_CPU_M68K) #elif defined(__microblaze__) if (hdr->ih_arch != IH_CPU_MICROBLAZE) #elif defined(__nios2__) if (hdr->ih_arch != IH_CPU_NIOS2) #elif defined(__blackfin__) if (hdr->ih_arch != IH_CPU_BLACKFIN) #elif defined(__avr32__) if (hdr->ih_arch != IH_CPU_AVR32) #else # error Unknown CPU type //没有找到CPU类型 #endif ... switch (hdr->ih_type) //判断镜像image类型 { ...} switch (hdr->ih_comp) //根据镜像压缩(compression)类型把内核镜像解压到指定的地址 { case IH_COMP_NONE: //使用的是没有压缩,执行该段case if(ntohl(hdr->ih_load) == data) //该data内核地址刚好位于ih_load加载地址,不需要移动,直接运行 { printf (" XIP %s ... ", name); //打印 } else //else执行内核移动,将内核data地址移到 hdr->ih_load (加载地址)中 { ... memmove ((void *) ntohl(hdr->ih_load), (uchar *)data, len); ...} break; case IH_COMP_GZIP: .... } ... switch (hdr->ih_os) //根据不同的操作系统类型来启动内核 { case IH_OS_LINUX: //LINUX系统,执行该段case #ifdef CONFIG_SILENT_CONSOLE fixup_silent_linux(); #endif do_bootm_linux(cmdtp, flag, argc, argv,addr, len_ptr, verify); //执行do_bootm_linux()函数启动内核 break; case IH_OS_NETBSD: //NETBSD系统 .... .... }
do_bootm()函数若执行无误,最终会执行do_bootm_linux()函数
1.3 bootm命令之do_bootm_linux函数分析
进入do_bootm_linux()函数(位于./lib_arm/armlinux.C) :
void do_bootm_linux (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[],ulong addr, ulong *len_ptr, int verify) { void (*theKernel)(int zero, int arch, uint params); //定义一个函数指针theKernel ... ... theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep); //1.设置theKernel地址=ih_ep镜像入口地址,用于后面启动内核 ... ... char *commandline = getenv ("bootargs"); //commandline指向"bootargs"命令环境参数. 用于后面setup_commandline_tag的形参 //在本uboot界面中输入print指令就能得到"bootargs=noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0" //root=/dev/mtdblock3:表示根文件系统root位于第4个flsh分区(mtdblock3), mtdblock0=bootloader,mtd1=参数,mtd2=内核 //init=/linuxrc:指定内核启动后运行的第一个脚本是当前目录下linuxrc脚本 //console=ttySAC0:指定选择串口0(ttySAC0)来打印信息、 ... ... /*2.设置tag 参数*/ setup_start_tag (bd); //在0X30000100地址保存start_tag数据,tag:用于u-boot给Linux kernel传递参数数据,因为内核启动后不能使用uboot了. setup_memory_tags (bd); //保存memory_tag数据,让LINUX知道内存多大 setup_commandline_tag (bd, commandline); //保存commandline_tag数据 setup_end_tag (bd); //初始化tag结构体结束 .... cleanup_before_linux (); //3.启动内核之前需要做一些清理工作,禁止中断,关闭cache theKernel (0, bd->bi_arch_number, bd->bi_boot_params); //4.通过ih_ep镜像入口地址启动内核,然后从0X30000010处读取tag参数, //其中"bd->bi_arch_number"参数是向内核传递的机器ID,用于内核确定机器ID是否正确, bd->bi_arch_number是在start_armboot函数中board_init里赋了值 }
从以上代码中可以看出启动内核之前主要执行了两步骤:
1.4 通过setup_...._tag函数为内核准备参数,
1.5 进入cleanup_before_linux函数清除中断和cache
1.4 tag参数函数分析:
1.4.1 d setup_start_tag (bd)函数分析如下: (在上面的tag结构体的首地址为什么在0X30000100?)
通过搜索"setup_start_tag"得到该函数位于./lib_arm/armlinux.c中:
static void setup_start_tag (bd_t *bd) { params = (struct tag *) bd->bi_boot_params; //初始化(struct tag *)型全局变量params= bd->bi_boot_params=0x30000100, // 之后的memory_tag和commandline_tag等tag数据都保存在params后面的偏移地址. params->hdr.tag = ATAG_CORE; //存放srat常量:params->hdr.tag = ATAG_CORE=0x54410001, tag表示tag类型的常量。 params->hdr.size = tag_size (tag_core); //存放srat长度:params->hdr.size=5, size表示start_tag的结构大小。 //因为tag_size (tag_core)=((sizeof(struct tag_header) + sizeof(struct tag_core)) >> 2) //其中tag_header结构体里有2个4字节成员(size,tag), //tag_core结构体里有3个4字节成员(flags,pagesize,rootdev) //所以tag_size (tag_core)=(2*4+3*4)>>2=5; 单位是4字节 params->u.core.flags = 0; //存放params的(tag_core型)结构体成员u.core.flags=0 params->u.core.pagesize = 0;//存放params的(tag_core型)结构体成员u.core.pagesize=0 params->u.core.rootdev = 0;//存放params的(tag_core型)结构体成员u.core.rootdev=0 params = tag_next (params); //params指向下一个tag(setup_memory_tags),params=(0x30000100+size*4)=0x30000114 }
通过上面代码,最终内存分布为: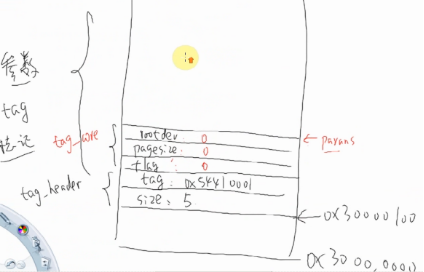
1.4.2 do_bootm_linux函数中setup_memory_tags(bd)函数分析如下:
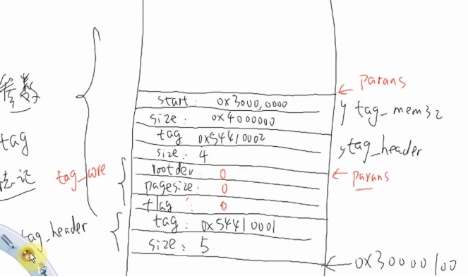
static void setup_memory_tags (bd_t *bd) { int i; for (i = 0; i < CONFIG_NR_DRAM_BANKS; i++) { params->hdr.tag = ATAG_MEM; //存放内存tag常量: params->hdr.tag =ATAG_MEM= 0x54410002 params->hdr.size = tag_size (tag_mem32); //存放内存长度:params->hdr.size =4 (len+ATAG_MEM+u.mem.size+u.mem.start) params->u.mem.start = bd->bi_dram[i].start; //存放内存(sdram)的的首地址, // bd->bi_dram[i].start在start_armboot()函数中init_sequence->dram_init结构函数成员里被复制: // gd->bd->bi_dram[0].start = PHYS_SDRAM_1;其中"PHYS_SDRAM_1"在./include/configs/100ask24x0.h中定义为0X30000000(bank6首地址) //所以,这里存放内存(sdram)首地址:params->u.mem.start =0X30000000; params->u.mem.size = bd->bi_dram[i].size; //同上,gd->bd->bi_dram[0].size = PHYS_SDRAM_1_SIZE;"PHYS_SDRAM_1_SIZE"被定义为0X04000000(64Mb) //所以,这里存放内存(sdram)长度: params->u.mem.size=0X04000000; params = tag_next (params); //params指向下一个tag(setup_commandline_tag),params=(0x30000114+size*4)=0x30000124 } }
通过上面代码,最终内存分布为:
1.4.3 do_bootm_linux函数中setup_commandline_tag(bd)函数分析如下:
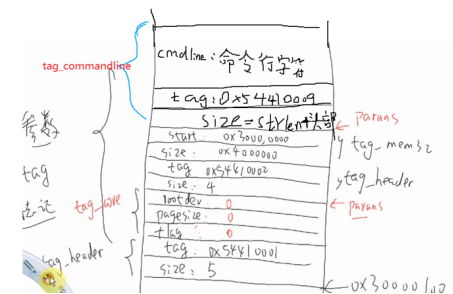
static void setup_commandline_tag (bd_t *bd, char *commandline) //commandline:指向"bootargs"命令环境参数 { char *p; if (!commandline) // 判断bootargs是否为空, return; for (p = commandline; *p == ' '; p++); //去掉空格 if (*p == '�') //判断*p是否为空 return; params->hdr.tag = ATAG_CMDLINE; //存放命令行产量: params->hdr.tag =ATAG_MEM= 0x54410009 params->hdr.size = (sizeof (struct tag_header) + strlen (p) + 1 + 4) >> 2; //存放命令行长度 params->hdr.size /* 其中 strlen (p) + 1 + 4: +1表示添加结束符'/0' */ /* +4 表示向上取整,比如当len=(4,5,6,7)时,size=(len+4)>>2=2; 实现4字节对齐 */ strcpy (params->u.cmdline.cmdline, p); //存放命令行参数:params->u.cmdline.cmdline=boottargs=noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0 params = tag_next (params); //params指向下一个tag(setup_end_tag) }
通过上面代码,最终内存分布为:
1.4.4 do_bootm_linux函数中setup_end_tag (bd)函数分析如下:
static void setup_end_tag (bd_t *bd) { params->hdr.tag = ATAG_NONE; //params->hdr.tag =ATAG_NONE=0 params->hdr.size = 0; //size=0 }
通过上面代码,最终内存分布为:

1.5 进入cleanup_before_linux函数清除中断和cache(./arm920t/cpu/cpu.c):
int cleanup_before_linux (void) { unsigned long i; disable_interrupts (); //禁止中断 /* turn off I/D-cache */ //关闭 指令Icache和数据Dcache asm ("mrc p15, 0, %0, c1, c0, 0":"=r" (i)); i &= ~(C1_DC | C1_IC); asm ("mcr p15, 0, %0, c1, c0, 0": :"r" (i)); /* flush I/D-cache */ i = 0; asm ("mcr p15, 0, %0, c7, c7, 0": :"r" (i)); return (0); }