学会使用日志(log)系统,做ROS大型项目的主治医生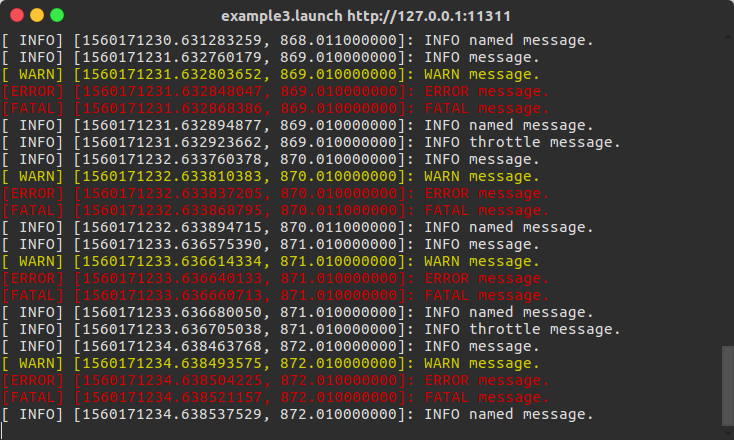
通过显示进程的运行状态是好的习惯,但需要确定这样做不会影响到软件的运行效率和输出的清晰度。ROS 日志 (log) 系统的功能就是让进程生成一些日志消息,显示在屏幕上、发送到特定 topic 或者储存在特定 log 文档中,以方便调试、记录、报警等。下面简单介绍如何生成和查看日志消息。
日志消息
在ROS中,有一个特殊的话题叫作/rosout,它承载着所有节点的所有日志消息。/rosout消息的类型是rosgraph_msgs/Log:
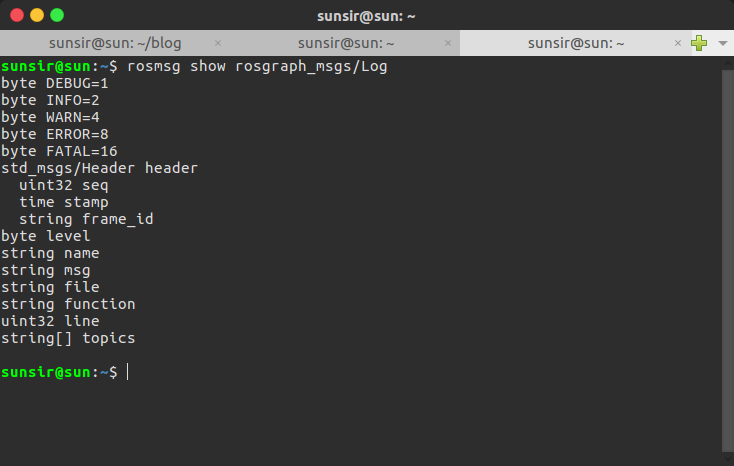
rosgraph_msgs/Log消息用来让各个节点发布日志消息,这样一来就能让网络上的任何一个人都看到。可以认为/rosout是一个加强版的print():他不是向终端输出字符串,可以将字符串和元数据放到一个消息中,发送到网络上的任何一个人。ROS节点应该向/rosout发布日志消息,这样一来这些消息就能被所有人看到。rospy客户端提供了多个函数来发布rosgraph_msgs/Log消息:
1 | if battery_voltage < 11.0: |
rospy.logwarn()函数实现了三件事请:
- 输出一个格式化的字符串到终端
- 输出更详细的警告到日志文档中,这个文档一般在~/.ros/log中
- 构建并发布一条消息到/rosout话题,其中包括警告以及节点元数据
日志等级
ROS有5个日志记录标准级别,这些名称是输出信息的函数的一部分,他们遵循以下语法:ROS_<LEVEL>[_<OTHER>]
每个消息级别用于不同的目的:
- DEBUG(调试):只在调试时用,此消息不出现在部署的应用中,仅用于测试。
- INFO(信息):标准消息,说明重要步骤或节点所正在执行的操作。
- WARN(警告):提醒一些错误,缺失或者不正常,但进程仍能运行。
- ERROR(错误):提示错误,尽管节点仍可在这里恢复,但对节点的行为设置了一定期望。
- FATAR(致命):这些消息通常表示阻止节点继续运行的错误。
生成基本的日志消息
由五个 C++ 宏来产生日志消息,每个宏对应一个级别:
1 | ROS_DEBUG_STREAM(message); |
编写如下 C++ 进程:
1 |
|
编译、执行之后结果如下:
生成一次性日志消息
ROS 提供了可以仅仅生成一次日志消息的宏:
1 | ROS_DEBUG_STREAM_ONCE(message); |
将上述 C++ 进程中的 log 命令替换一下,得到如下的执行结果:

可以看到每个日志只生成了一次。
生成频率受控的日志消息
1 | ROS_DEBUG_STREAM_THROTTLE(interval, message); |
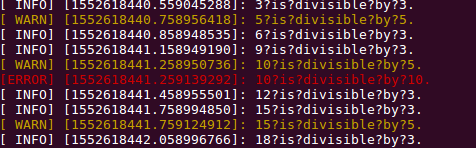
参数 interval 是 double 型,表示相邻日志消息出现的最小时间间隔,以秒为单位。得到如下的执行结果:

查看日志消息
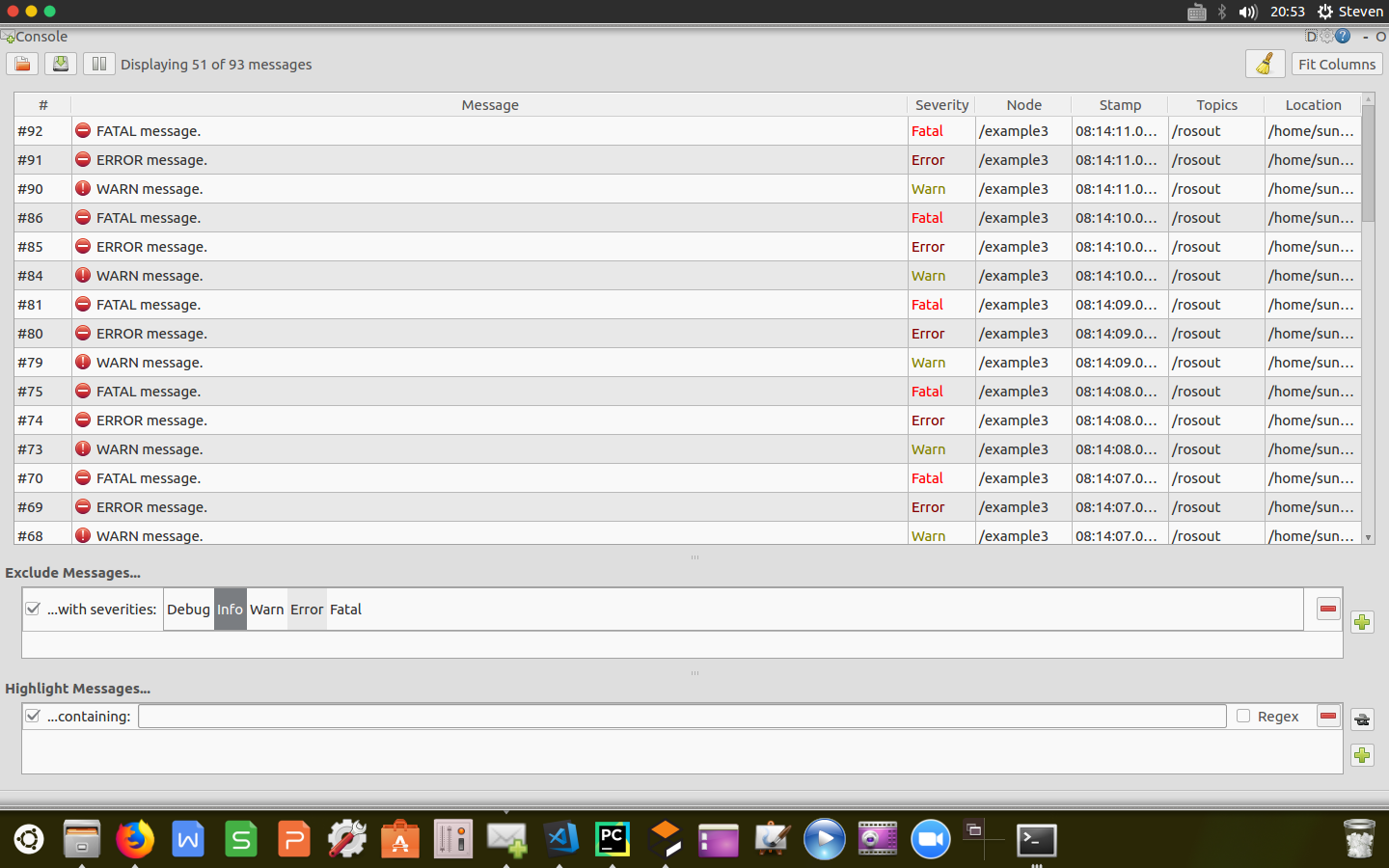
日志消息有三个不同的输出目的地,包括屏幕、rosout topic、log 文档。其中发布到 rosout topic 的 msg 类型是 rosgraph_msgs/Log。除了 topic echo,还可以通过 rqt_console 查看日志消息:
启用和禁用日志消息
ROS 默认只处理 INFO 或者更高级别消息,DEBUG 级别的消息会被忽略。可以通过命令行设置显示的日志级别:rosservice call /node-name/set_logger_level package-name level
其中:
- set_logger_level服务由各个节点自动提供;
- node-name 期望设置日志级别的节点名称;
- package-name 拥有这个节点的 package 名称;
- level 是五个级别中的一个。
另外也可以通过图形接口设置日志级别:rqt_logger_level
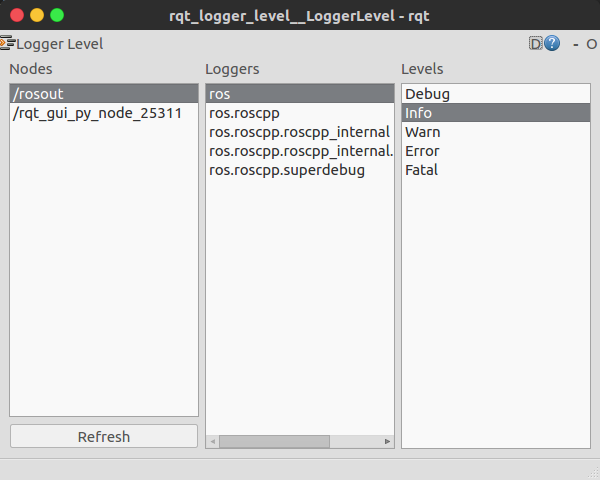
图中列出了节点列表、日志记录器列表、日志级别列表。在图中操作与 rosservice 命令的效果一致。
另外,也可以在 C++ 进程中设置日志级别。ROS node 改变自身日志级别最直接的方式是使用 log4cxx 提供的接口:
1 | #include <log4cxx/logger.h> |
其中 Debug 可以替换为 Info、Warn、Error、Fatal。
后记
对于大型ROS项目的调试必须要利用到日志系统,所有成熟的框架都为开发者提供了代码进程的调试工具,学会这些工具能够很大程度上帮助我们少走弯路节省时间,所以我们要能够利用这些辅助工具来作为开发过程中的左膀右臂,达到事半功倍的效果。