今天突然想查一下关于unity的手势识别的资料,由于前段时间浏览器收藏的所有网址都丢失了,不敢信任,所以打算以后把所有资料放到博客中。
此篇说的是unity通过厉动(Leap Motion)进行手势识别,不过没有写过只是看(因为没有时间。。。。),转自 https://blog.csdn.net/u012289636/article/details/46883731,以下全是从这个链接复制粘贴过来的。
Leap Motion作为一款手势识别设备,相比于Kniect,优点在于精确度。
在我的毕业设计《场景漫游器》的开发中,Leap Motion的手势控制作为重要的一个环节。以此,谈谈开发中使用Leap Motion进行手势识别的实现方式以及需要注意的地方。
一、对Leap Motion的能力进行评估
在设定手势之前,我们必须知道Leap Motion能做到哪种程度,以免在设定方案之后发现很难实现。这个评估依靠实际对设备的使用体验,主要从三个方面:
1.Leap Motion提供的可视化的手势识别界面
2.SDK文档说明
3.Leap商店中的APP
基本可以的得出:
1.Leap Motion的识别对于水平方向或者以水平方向为基础手势能够较好的识别。
2.对于握拳或者垂直的行为识别会出现误差,这种误差和具体的手势行为有关。
3.不应该过分依赖高精确度,Leap Motion能检测到毫米级别是没错的,但是有时候会把你伸直的手指识别成弯曲的,所以要做好最坏的打算。
二、实际的需要
移动、旋转、点击按钮、缩放和旋转物体、关闭程序、暂停,基本的功能需求是这样。
有一些原则:
1.相同环境下的手势应该接近和方便的转换。旋转和移动的之间的转换应该设计的很自然。
2.手势避免冲突,手势过于相似不是什么好事。比如三个伸直的手指和四个伸直的手指不应该被设计成两个手势。当然这不是绝对的,如果你进行一个缓慢的动作并且动作是面向Leap Motion的摄像头,这时候应该相信它,至少要针对这个手势做一个单独的测试。
三、考虑基本的数据结构和算法的轮廓
Leap Motion的SDK在第一部分的时候已经浏览过,最起码能知道Leap Motion可以包含的信息,从SDK看来这是非常丰富的,既然设计自己的手势,那么最好不要依赖于SKD开发包的炫酷的手势。很可能,这些手势只是官方用来演示或者炫耀的。自己设计手势的基本数据结构也有另外的好处,比如更换了体感设备,但是功能是相似的,这时候只需要更改获取数据的方式就可以了(从一个SDK更换到另一个SDK),而不要修改算法。
算法的轮廓与基本数据有很大的关系。所以数据结构一定要尽量的精简并且允许修改(可能某个算法占据了决定性因素,但是开始没考虑到)。
- public class HandAndFingersPoint : MonoBehaviour
- {
- const int BUFFER_MAX=5;
- Controller m_LeapCtrl;
-
- <span style="white-space:pre"> </span>public E_HandInAboveView m_AboveView = E_HandInAboveView.None;
-
-
- private Dictionary<Finger.FingerType,FingerData>[] m_FingerDatas = new Dictionary<Finger.FingerType, FingerData>[2];
-
- private Dictionary<Finger.FingerType,FingerData>[,] m_FingerDatasBuffer=new Dictionary<Finger.FingerType, FingerData>[2,BUFFER_MAX];
- private int m_CurBufIndex=0;
-
- private PointData[] m_PalmDatas = new PointData[2];
-
- private readonly PointData m_DefaultPointData = new PointData(Vector.Zero, Vector.Zero);
- private readonly FingerData m_DefaultFingerData = new FingerData(Vector.Zero,Vector.Zero,Vector.Zero);
HandAndFingersPoint类中剩下的部分是对数据的填充、清除、刷新等方法。E_HandInAboveView记录哪只手先进入Leap Motion的视野,用于设定优先级。
另外两个基本的数据结构PointData和FingerData:
- public struct FingerData
- {
- public PointData m_Point;
- public Vector m_Position;
-
- public FingerData(PointData pointData, Vector pos)
- {
- m_Point = pointData;
- m_Position = pos;
- }
-
- public FingerData(Vector pointPos, Vector pointDir, Vector pos)
- {
- m_Point.m_Position = pointPos;
- m_Point.m_Direction = pointDir;
- m_Position = pos;
- }
-
- public void Set(FingerData fd)
- {
- m_Point = fd.m_Point;
- m_Position = fd.m_Position;
- }
- }
- public struct PointData
- {
- public Vector m_Position;
- public Vector m_Direction;
-
- public PointData(Vector pos,Vector dir)
- {
- m_Position = pos;
- m_Direction = dir;
- }
-
- public void Set(PointData pd)
- {
- m_Position = pd.m_Position;
- m_Direction = pd.m_Direction;
- }
-
- public void Set(Vector pos,Vector dir)
- {
- m_Position = pos;
- m_Direction = dir;
- }
- }
-
- public enum E_HandInAboveView
- {
- None,
- Left,
- Right
- }
基本数据定义好之后,最好确认数据的填充是没问题的,实际通过Frame frame = Leap.Controller.Frame();来获取最新的数据。这时候并不急着写完和基本数据相关的方法,现在最终要的是手势算法的合理性。要判断是否合理,最好先写一个算法。
最简单的是伸掌手势,在控制中水平的伸掌用于漫游,垂直的伸掌用于暂停。我发现手掌依赖于手指,而手指包括两个状态——伸直和弯曲。另外,其他的手势,也都是手指的伸直或者弯曲,外加方向的判定累积出各种效果。理所当然的,应该单独写出手指的弯曲和伸直判定算法:
- public class FingerMatch
- {
-
- static readonly float FingerBendState_Radian = Mathf.PI*4f / 18 ;
-
- static readonly float FingerStrightState_Radian = Mathf.PI/12;
-
-
-
-
-
-
-
- public static bool StrightState(FingerData fingerData, float adjustBorder=0f)
- {
- bool isStright =false;
- Vector disalDir = fingerData.m_Point.m_Direction;
-
- if (!disalDir.Equals(Vector.Zero))
- {
- Vector fingerDir = fingerData.m_Point.m_Position - fingerData.m_Position;
- float radian = fingerDir.AngleTo(disalDir);
-
- if (radian < FingerStrightState_Radian + adjustBorder)
- {
- isStright = true;
- }
- }
- return isStright;
- }
-
-
-
-
-
-
-
- public static bool BendState(FingerData fingerData, float adjustBorder=0f)
- {
- bool isBend = false;
-
-
- Vector disalDir = fingerData.m_Point.m_Direction;
- if( !disalDir.Equals(Vector.Zero) )
- {
- Vector fingerDir = fingerData.m_Point.m_Position - fingerData.m_Position;
-
- float radian = fingerDir.AngleTo(disalDir);
-
-
- if (radian > FingerBendState_Radian + adjustBorder)
- {
- isBend = true;
- }
- }
-
- return isBend;
- }
-
- }
上面包含了一个重要的概念——阈值。它是描述到底何种程度算是伸直,何种程度算是弯曲。阈值的确定是需要实际测试来决定的。写到这里也是时候进行一次简单的测试了,毕竟算法的轮廓已经确定。我甚至没写出手掌伸直的判定算法,就确定是可行的。
基本数据结构相关的操作——HandAndFingersPoint类:https://github.com/LoranceChen/Leap-Motion-In-Unity3D
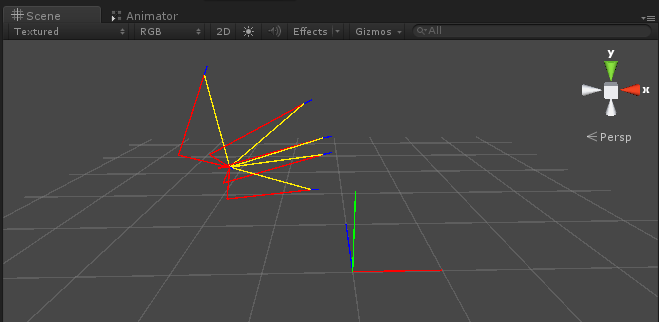
该类使用基本数据,在Unity Editor中运行会展示了一个手掌的轮廓,蓝色表示手指的方向,红色表示手指骨根到掌心和指尖的连线,黄色表示掌心到指尖的连线:
四、手势实现中简要的概括
其他代码都可以在我的GitHub:Leap Motion In Unity3D仓库中(https://github.com/LoranceChen/Leap-Motion-In-Unity3D)获取,在手势的实现中,也包含了一些小的技巧,比如对于动作的匹配要防止手指的颤抖引起的误差,采用离散的数据取样——每隔一定时间做一次取样。
使用和观察这些脚本的方式:可以把这些脚本放在一个GameObject中,通过Leap Motion会看到脚本的属性在匹配成功时会发生变化。另外,脚本中包含了事件的注册功能,换句话说,外部可以向任意的手势注册一个事件,以便手势完成匹配或者到达某种匹配状态时做一些额外的处理。这些脚本现在并不能直接完成我们的需求,如暂停。我们需要在这些手势状态或者动作上做进一步的限定,如根据掌心的方向设定垂直向前的手掌为暂停,水平的手掌为平移之类的。