一、Ubuntu和ROS版本的对应关系
Ubuntu 和 ROS 都存在不同的版本,其对应关系如下:
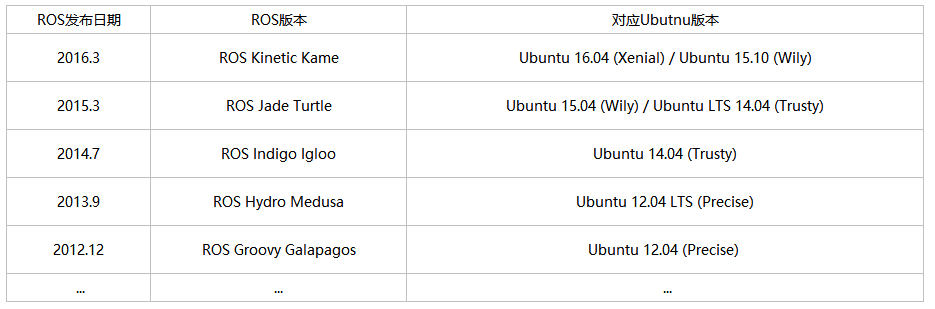
注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了~
笔者安装的是Ubuntu14.04 LTS(双系统,非虚拟机),所以安装的是Indigo版本,以下安装步骤均是基于Indigo版本的。
二、配置Ubuntu的软件源
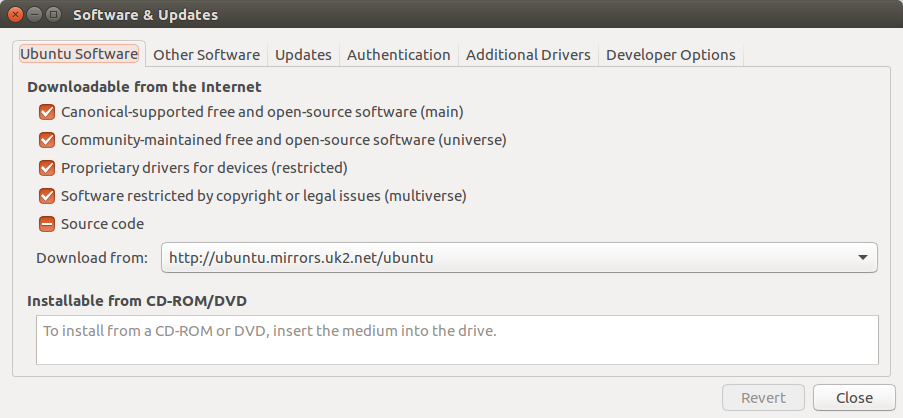
由于ROS属于社区支持,还有很多其他的库并不是官方支持的,所以需要修改ubuntu的仓库属性,让其允许获得属性为“main”、“restricted”、“universe”和“multiverse”的源,可以根据这个进行配置。
配置成如下图所示即可,一般情况下,这些配置都是默认的。
下面就可以正式准备安装了!可以参考本篇文章安装,也可参考:ROS维基百科 - Indigo安装
三、设置源地址文件sources.list
设置源地址文件使电脑系统可以接受来自packages.ros.org的软件包,ROS Indigo只支持debian安装包的Saucy(13.10)和Trusty(14.04)版本,执行如下命令把ROS的源地址添加进源地址文件列表。
这里笔者选择了中国科技技术大学的镜像源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
一旦添加了正确的源地址文件,操作系统就知道去哪里下载程序,并根据命令自动安装软件。
四、验证你的密钥
需要在你的系统中对ROS软件包的相关密钥进行验证,要不然在安装的时候会通不过系统的安全认证而无法安装。
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
五、安装
首先,确认你的ubuntu系统的源列表是最新的:
$ sudo apt-get update && sudo apt-get install dpkg
然后开始正式安装!按照安装包的大小和功能,有三个安装包可以选择:
桌面版完全安装(推荐):包括ROS、rqt环境、rviz三维仿真环境、通用机器人库、2D/3D仿真器、导航和2D/3D感知功能。
$ sudo apt-get install ros-indigo-desktop-full
桌面版普通安装:包括包括ROS、rqt环境、rviz三维仿真环境、通用机器人库功能。
$ sudo apt-get install ros-indigo-desktop
基础ROS安装:仅包括ROS、编译和通信函数库,没有GUI工具。
$ sudo apt-get install ros-indigo-ros-base
六、始化rosdep
在使用ROS之前,还需要初始化rosdep,即ROS的软件包依赖项。rosdep使我们能够非常轻松地为我们想要编译和想在ROS上运行的一些核心部件安装系统依赖项。
$ sudo rosdep init
$ rosdep update
七、设置环境变量
如果ROS的环境变量能够在每个新的终端(shell)建立的时候自动地添加进我们的bash进程,那将是非常方便的。
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
//为了使环境变量设置立即生效,在终端中输入:
$ source ~/.bashrc
如果你安装不止一个ROS的版本,~/.bashrc必须只更新你目前所使用的版本的setup.bash。
八、获得rosinstall
rosinstall是一个单独发行的在ROS经常用到的命令行工具。它使你能够轻易地使用一个命令就下载很多ROS的源文件包。在ubuntu上执行如下命令安装此工具:
$ sudo apt-get install python-rosinstall
至此,ROS的安装正式宣告结束,下面运行一个鼠标控制海龟移动的demo来验证ROS是否成功安装好了。
九、ROS测试
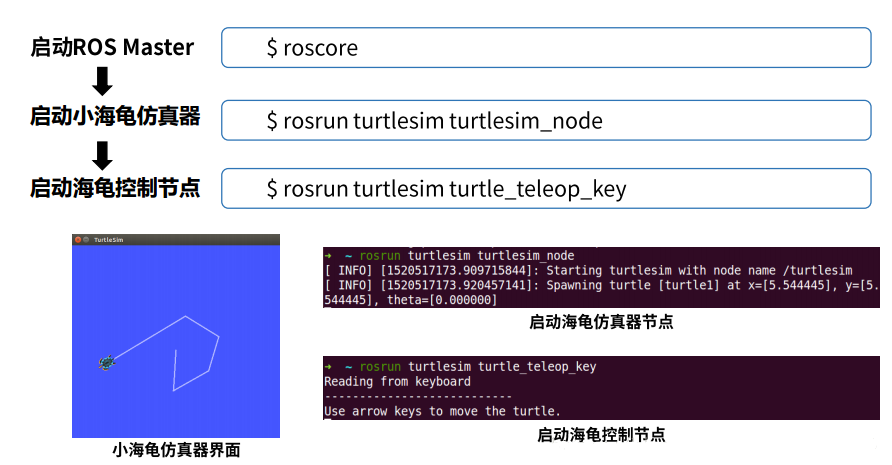
第一步,打开一个终端测试roscore是否能正常启动,使用ROS必须保证roscore运行:
$ roscore
第二步,新开启一个终端,执行以下命令:
$ rosrun turtlesim turtlesim_node
第三步,再开启一个终端,执行以下命令:
$ rosrun turtlesim turtle_teleop_key
如下图所示:
十、卸载ROS
步骤方法:
1、首先卸载包
sudo apt-get purge ros-*
2、然后卸载依赖包
sudo apt-get autoremove
参考: