先谈谈全局变量的特点
全局变量(Global Variables):在计算机编程语言中,所谓全局变量是指具有全局作用域的变量,这意味着它在整个程序中是可见的,因此是可访问的。所谓可访问,是指全局可读、全局可写。在编译语言中,全局变量通常是静态变量,其范围(生命周期)是程序的整个运行时。当然解释性语言除外,解释性语言包括命令行解释器(比如python, Java script,shell等)中,全局变量通常在声明时由解释器动态分配,这是由于解释性语言是读取>解释>执行模式,不像编译性语言,运行前可预知变量属性,解释性语言读取解释前无从获取变量属性。
在C/C++编程语言中,全局变量的这种全局可见性特点,滥用全局变量会让代码表现当相当邪恶!如果使用全局变量,就意味着下面这些场景的存在:
- 实际代码可能有很多地方在读、在写全局变量
- 全局变量在多线程或多任务间共享
- 全局变量在常规代码和中断服务程序间共享
为啥说全局变量很邪恶?
单片机裸机编程
或许你会说,我就这样用?咋了?软件也跑的很好啊?来看看这个场景:
一个超字宽的变量(比如16位单片机,字宽即为16位),正被一个常规代码在写变量数据域时且还没写完,啪叽,来了个中断!中断一来,CPU赶紧把手里的活儿停下来,奔过去处理中断了,不巧在中断函数里,该变量因业务需求有需要写这个变量有经验的不这么写,仅为了方便说明:
举个栗子,还是以之前文章的传感器为例,实际应用中传感器可能是下面这样的数据结构来描述:
#ifndef _SENSOR_H_
#define _SENSOR_H_
typedef struct _t_sensor{
/* 测量值与测量范围及单位有关 */
float value;
/* 测量范围,根据采样值映射 */
float upper_range;
float lower_range;
/* 温度单位 */
unsiged char unit;
}T_SENSOR;
/*假定是一个温度测量产品*/
extern T_SENSOR temperature;
#endif _SENSOR_H_
假定这个传感器数据结构有这样一些被访问的可能:
- 上位机会改写测量数据的范围及单位,串口通信中断服务程序直接写这个全局变量中的上下限数据域
- LCD操作界面可改写温度上下限范围。
- 测量更新模块根据当前范围及单位配置,将传感器采集到的数据映射为测量值。
这些需求用例,用图描述一下:

比如用户操作HMI界面正改写温度范围,而此时远程上位机也正改写温度范围,按上面这个做法,可能出现哪些邪恶的后果呢?
- 通过LCD界面写入上限为300.5(假定原下限为0),此时远程串口报文收到,程序直接在中断服务程序将范围修改为(-100,200.5),此时中断返回,用户可能接着修改下限为-200,则最终设备内的温度范围可能既不是(-100,200.5)也不是(-200,300.5),而可能是(-200,200.5)。这是一个易理解的数据混乱的场景。
- 现实中如果使用的单片机是8位/16位单片机,一条指令无法完成操作一个32位立即数,有可能才完成一个浮点数中某几个字节,此时就被中断打断写入200,然后中断返回后继续写入剩下字节,数据可能会变得非常诡异!利用http://www.speedfly.cn/tools/hexconvert/ 在线工具转换浮点数到16进制:
0x43964000 /* 浮点数300.5的16进制*/
0x43488000 /* 浮点数200.5的16进制*/
假定中断进入时,HMI界面程序写入了0x4396前两个字节,中断返回时,上限改写为200.5(0x43488000),此时继续执行后面两个字节写入,则上限变成为(0x43484000),来看看这个数是多大?变成了200.25,这是不是很邪恶?
或许有的朋友会说,可以在LCD写范围时关中断嘛。诚然,可以这么做:
void hmi_operate()
{
/*关中断*/
_disable_interrupt();
/*改写温度范围*/
....
/*开中断*/
_enable_interrupt();
}
但是如果这个全局变量有很多地方在改写,为了数据安全,势必就到处开/关中断,这样做的坏处:
- 经常开关中断,势必影响中断响应,会有概率丢失异步中断处理(比如串口按字节接收中断,可能就会漏收字节),程序不健壮,工作不稳定。
- 到处访问改写,不易调试,群魔乱舞,代码也不易维护。想加点东西,改点东西可能随处都是坑,一不小心就掉坑里去了!
- 初学者甚至不会用struct将相关的数据包在一起,其结果是代码里到处都是基本类型的全局变量。一些简单的业务逻辑实现变成一个复杂的代码,数据信息流向一团乱麻。
裸机程序策略
对于上面这样一个应用场景,怎么解决这种混乱的现象呢。这里分享一下我的思路,这里将主要的串口以及测量模块的设计思路用UML图描述一下大体思路:
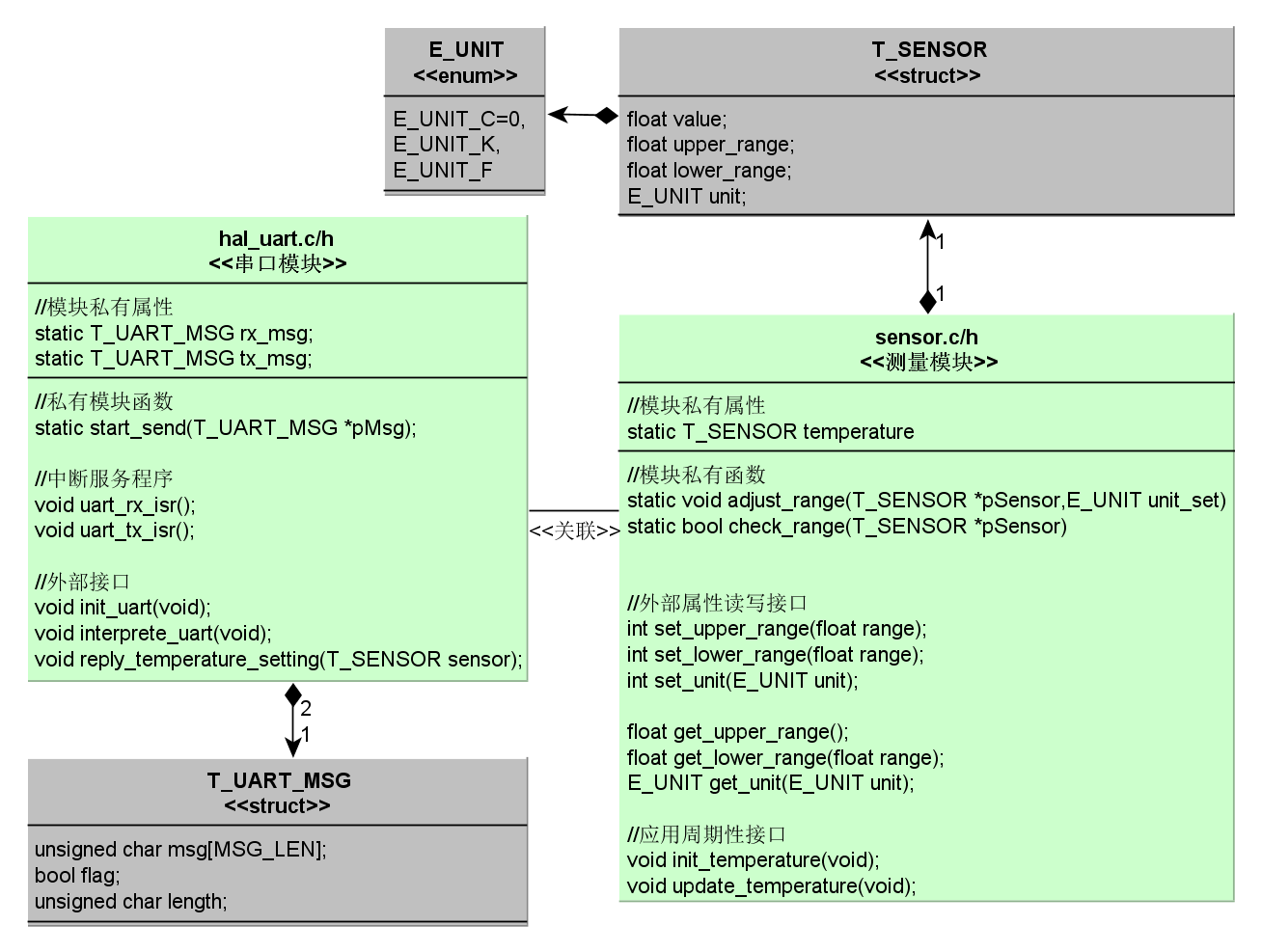
如此一来,外部就看不到全局变量了,只需要调用对应的set/get方法即可实现读写访问,由于是裸机前后台程序,数据流向就变的非常清晰了。main函数的主循环大致就可能是这样:
void main(void)
{
/*模块初始化*/
init_uart();
init_temperature();
....
while(1)
{
interprete_uart();
/*可能是周期性调用*/
if(timer_100ms)
{
timer_100ms = 0;
update_temperature();
}
....
}
}
那么uart协议解析要怎么做呢?
void interprete_uart(void)
{
if(rx_msg.flag)
{
rx_msg.flag = false;
/*报文完整性检查*/
...
/*设置温度配置*/
set_upper_range(xxx);
set_lower_range(xxx);
set_unit(xxx);
}
if(tx_msg.flag)
{
tx_msg.flag = false;
start_send();
}
}
static start_send(T_UART_MSG *pMsg)
{
/*负责底层操作,启动中断传输*/
}
/*提供应答数据接口*/
void reply_temperature_setting(T_SENSOR sensor)
{
/*解析传入参数并封装应答报文*/
}
如此一来,数据流向将变得很清晰,串口接收到数据更新范围配置时,也无需开关中断了,从应用角度几乎见不到全局变量。当然这样做的代价就是会增加一些栈开销。但是这种代价还是值得的。
对于测量模块的set函数思路稍做说明:
int set_upper_range(float range)
{
T_SENSOR temp = temperature;
temp.upper_range = range;
/*实现范围合理性检查*/
if(check_range(temp))
{
/*两个结构体变量可以直接赋值*/
temperature = temp;
return 0;
}
else
{
return -1;
}
}
int set_unit(E_UNIT unit)
{
if(unit>E_UNIT_F)
return -1;
adjust_range(&temperature,unit);
temperature.unit = unit;
}
上述代码旨在分享个人的一些思路,其中或有不够严谨的地方,但通过这样的设计思路,应能大幅度远离满天飞的全局变量。
多任务/多线程环境
上面描述其实本质上描述了裸机程序里,普通模式运行程序与中断服务程序对于临界资源的竞争。事实上现在不管是单片机,还是处理器,大多都是基于一个操作系统进行应用开发。甚至还可能是多核芯片,这里就存在并发竞争访问资源的问题。
临界资源:各任务/线程采取互斥的方式,实现共享的资源称作临界资源。属于临界资源的硬件串口打印、显示等,软件有消息缓冲队列、变量、数组、缓冲区等。多任务/线程间应采取互斥方式,从而实现对这种资源的共享。
多任务/多线程情况下在写模块时,只需要封装进保护机制即可。常见的保护机制有关中断、信号量、互斥锁等。在Linux内核中为应对多核并发访问还有自旋锁机制。由于篇幅所限,本文就不做展开了,先挖个坑,以后有机会再分享吧。
总结一下
在前文介绍static文章的基础上,相对更深入的介绍了为何需要隐藏属性以及开放接口的做法。以及如何远离邪恶的全局变量漫天飞舞的不良设计风格。