本文为大大维原创,最早于博客园发表,转载请注明出处!!!
一、实验目的和要求
了解LED点阵显示的基本原理和实现方法。掌握点阵汉字库的编码和从标准字库中提取汉字编码的方法。
二、实验设备
单片机测控实验系统
LED点阵显示器实验模块
Keil开发环境
STC-ISP程序下载工具
三、实验内容
了解16*16点阵电路的原理。编写汇编语言程序,编写一行汉字字符(至少三个字)的显示程序,并且能够从左到右(或从右到左)循环显示。
四、实验步骤
1. 掌握点阵式LED显示屏的控制方法;
2. 使用MCS-51汇编语言,使用LED点阵显示器显示出正确的汉字字符及动态效果;
3. 将编译后的程序下载到51单片机,观察LED显示屏的显示结果。
五、实验原理
高亮度LED发光管构成点阵,通过编程控制可以显示中英文字符、图形及视频动态图形。所显示字符的点阵数据可以自行编写(即直接点阵画图),也可从标准字库(如ASC16、HZ16)中提取。后者需要正确掌握字库的编码方法和字符定位的计算。
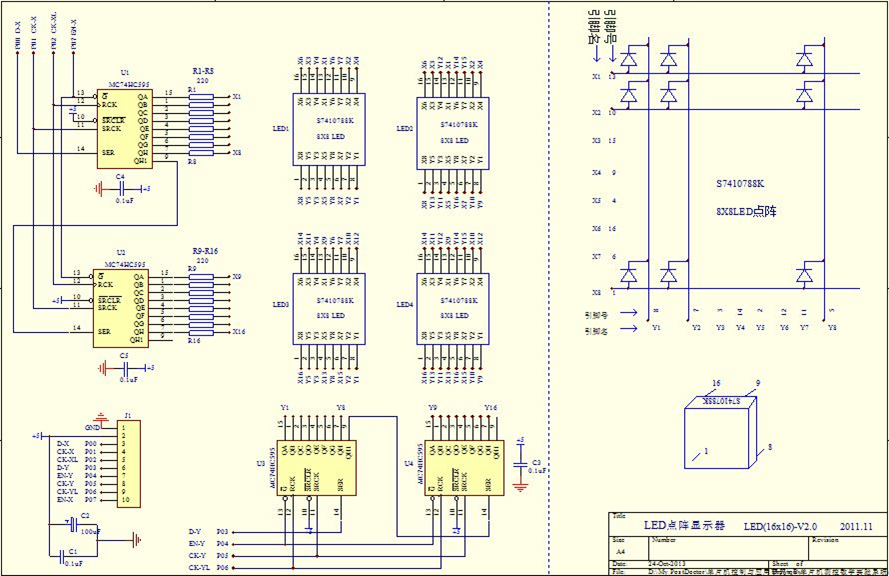
实验用的LED点阵显示屏为16*16点阵。
行和列分别使用两个移位寄存器作为输出。
当移位寄存器输出的第i行为0,第j列为1时点亮点(i,j)。
为了能够显示出一个点阵字型,需要进行循环扫描,也就是每一次只点亮一行,然后在列上输出该列对应的16个点阵值。
输出一行后暂停一段时间,输出下一行。为了达到较好的显示效果,整屏总的扫描时间不高于40ms。
上述过程中行列可以互换。
实验中使用的移位寄存器是74HC595,它是一个同时具有串行移位和输出锁存驱动功能的器件。
74HC595是具有8位移位寄存器和一个存储器,三态输出功能。 移位寄存器和存储器是分别的时钟。
数据在SRCK(移位寄存器时钟输入)的上升沿输入到移位寄存器中,在RCK(存储器时钟输入)的上升沿输入到存储寄存器中去。
移位寄存器有一个串行移位输入(行Dx(P00)、列Dy(P03)),和一个串行输出(QH),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能 (P02和P07为低电平)时,存储寄存器的数据输出到总线。
在控制74HC595时,首先将数据放到串行输入的SI端,然后在串行时钟SRCK上产生一个脉冲,即可输出一个bit,重复以上步骤16次,输出所有列值。
然后给存储器时钟RCK一个脉冲,将串行数据锁存起来。将使能端 输出低电平,驱动到LED点阵上。
行的输出每次只移位一次,并重新锁存即可。
其他信息见给定的参考资料。
六、实验代码
ORG 0000H
AJMP START
ORG 0030H
START:
D_X EQU P0.0
CK_X EQU P0.1
CK_XL EQU P0.2
D_Y EQU P0.3
EN_Y EQU P0.4
CK_Y EQU P0.5
CK_YL EQU P0.6
EN_X EQU P0.7
COUNT EQU R0
COUNT_X EQU R3
COUNT_Y EQU R4
MOV R0,#0 ;完成第R0/2屏扫描
MOV R1,#8
MOV R2,#16
MOV COUNT_X,#0
MOV COUNT_Y,#0
MOV R5,#32 ;一屏16列,总共扫描48列,需要扫48-16=32屏
CLR EN_X
CLR EN_Y
;初始化
MAIN:
CLR A
MOV COUNT_Y,A ;COUNT_Y=0
CLR A
MOV A,COUNT
MOV COUNT_X,A ;COUNT_X=COUNT
LOOP:
ACALL DISPLAY_Y
ACALL DISPLAY_X
ACALL DELAY
DJNZ R2,LOOP
;长延迟
MOV R1,#0FFH
MOV R7,#2FH
L_DELAY:
ACALL DELAY
DJNZ R1,L_DELAY
DJNZ R7,L_DELAY
MOV R1,#8
INC COUNT
INC COUNT ;扫一屏,COUNT加2
DJNZ R5,MAIN
MOV R5,#0FFH
AJMP START
DISPLAY_Y:
MOV DPTR,#TAB_Y
CLR A
MOV A,COUNT_Y
MOVC A,@A+DPTR
MOV R1,#8
LP_Y1:
RLC A
CLR CK_Y
MOV D_Y,C
SETB CK_Y
DJNZ R1,LP_Y1
MOV R1,#8
INC COUNT_Y
CLR A
MOV A,COUNT_Y
MOVC A,@A+DPTR
LP_Y2:
RLC A
CLR CK_Y
MOV D_Y,C
SETB CK_Y
DJNZ R1,LP_Y2
MOV R1,#8
INC COUNT_Y
CLR CK_YL
NOP
SETB CK_YL
CLR EN_Y
CLR CK_YL
RET
DISPLAY_X:
MOV DPTR,#TAB_X
CLR A
MOV A,COUNT_X
MOVC A,@A+DPTR
MOV R1,#8
LP_X1:
RLC A
CLR CK_X
MOV D_X,C
SETB CK_X
DJNZ R1,LP_X1
MOV R1,#8
INC COUNT_X
CLR A
MOV A,COUNT_X
MOVC A,@A+DPTR
LP_X2:
RLC A
CLR CK_X
MOV D_X,C
SETB CK_X
DJNZ R1,LP_X2
MOV R1,#8
INC COUNT_X
CLR CK_XL
NOP
SETB CK_XL
CLR EN_X
CLR CK_XL
RET
;延迟函数
DELAY:
MOV R6,#0FH
DJNZ R6,$
RET
TAB_X:
;===========================================================================
;我(0) 爱(1) 你(2)
DB 04H,00H,24H,10H,24H,12H,24H,21H,7FH,0FEH,0C4H,40H,44H,82H,04H,02H;
DB 04H,04H,0FFH,0C8H,04H,30H,44H,28H,34H,44H,05H,82H,04H,1FH,00H,00H ;"我",0
DB 01H,00H,26H,82H,34H,84H,2CH,89H,24H,91H,24H,0E1H,37H,0B2H,4CH,0AAH;
DB 44H,0A4H,44H,0A4H,4CH,0AAH,74H,0B2H,0C4H,81H,45H,01H,06H,01H,00H,00H ;"爱",1
DB 00H,80H,01H,00H,06H,00H,1FH,0FFH,0E0H,00H,02H,08H,04H,30H,18H,0C0H;
DB F0H,02H,10H,01H,13H,0FEH,10H,00H,10H,80H,14H,60H,18H,18H,00H,00H ;"你",2
;===========================================================================
TAB_Y:
;===========================================================================
DB ~80H,0FFH,~40H,0FFH,~20H,0FFH,~10H,0FFH,~08H,0FFH,~04H,0FFH,~02H,0FFH,~01H,0FFH
DB 0FFH,~80H,0FFH,~40H,0FFH,~20H,0FFH,~10H,0FFH,~08H,0FFH,~04H,0FFH,~02H,0FFH,~01H
;===========================================================================
END
七、附录
实验电路原理图:点击查看