参考博客地址:
1、http://blog.csdn.net/chenhezhuyan/article/details/8093585
2、http://blog.csdn.net/yangyangyang20092010/article/details/8712742
一、几何矩由HU在1962年提出,了解以下三个概念
1、普通矩(也叫 p+q 阶不变矩),和p+q 阶中心矩的定义
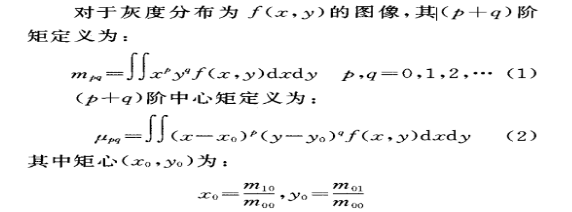
对于数字图像,离散化得到:
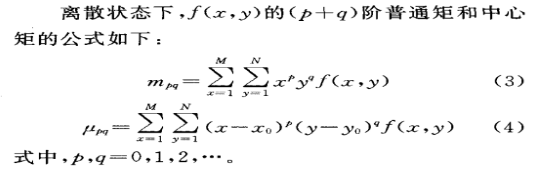
PS:直接用普通矩或中心矩进行特征表示,不能使特征同时具有平移、旋转和比例不变性
2、归一化中心矩定义

PS:如果利用归一化中心矩,则特征不仅具有平移不变性,而且还具有比例不变性
二、HU矩定义
HU矩利用二阶和三阶归一化中心矩构造了7个不变矩,他们在连续图像条件下可保持平移、缩放和旋转不变,具体定义如下:



网上找到两种公式,加减符号不同的地方以右边M1~M7为准。
3、博采众长
实际上,在对图片中物体的识别过程中,只有 和
和 不变性保持的比较好,其他的几个不变矩带来的误差比较大,有学者认为只有基于二阶矩的不变矩对二维物体的描述才是真正的具有旋转、缩放和平移不变性(
不变性保持的比较好,其他的几个不变矩带来的误差比较大,有学者认为只有基于二阶矩的不变矩对二维物体的描述才是真正的具有旋转、缩放和平移不变性( 和
和 刚好都是由二阶矩组成的)。
刚好都是由二阶矩组成的)。
由Hu矩组成的特征量对图片进行识别,优点就是速度很快,缺点是识别率比较低。
Hu不变矩一般用来识别图像中大的物体,对于物体的形状描述得比较好,图像的纹理特征不能太复杂,像识别水果的形状,或者对于车牌中的简单字符的识别效果会相对好一些。
4、代码实现
1、C语言实现
1//*****************************************************************// 2 double M[7] = {0}; //HU不变矩 3 bool HuMoment(IplImage* img) 4 { 5 int bmpWidth = img->width; 6 int bmpHeight = img->height; 7 int bmpStep = img->widthStep; 8 int bmpChannels = img->nChannels; 9 uchar*pBmpBuf = (uchar*)img->imageData; 10 11 double m00=0,m11=0,m20=0,m02=0,m30=0,m03=0,m12=0,m21=0; //中心矩 12 double x0=0,y0=0; //计算中心距时所使用的临时变量(x-x') 13 double u20=0,u02=0,u11=0,u30=0,u03=0,u12=0,u21=0;//规范化后的中心矩 14 //double M[7]; //HU不变矩 15 double t1=0,t2=0,t3=0,t4=0,t5=0;//临时变量, 16 //double Center_x=0,Center_y=0;//重心 17 int Center_x=0,Center_y=0;//重心 18 int i,j; //循环变量 19 20 // 获得图像的区域重心(普通矩) 21 double s10=0,s01=0,s00=0; //0阶矩和1阶矩 22 for(j=0;j<bmpHeight;j++)//y 23 { 24 for(i=0;i<bmpWidth;i++)//x 25 { 26 s10+=i*pBmpBuf[j*bmpStep+i]; 27 s01+=j*pBmpBuf[j*bmpStep+i]; 28 s00+=pBmpBuf[j*bmpStep+i]; 29 } 30 } 31 Center_x=(int)(s10/s00+0.5); 32 Center_y=(int)(s01/s00+0.5); 33 34 // 计算二阶、三阶矩(中心矩) 35 m00=s00; 36 for(j=0;j<bmpHeight;j++) 37 { 38 for(i=0;i<bmpWidth;i++)//x 39 { 40 x0=(i-Center_x); 41 y0=(j-Center_y); 42 m11+=x0*y0*pBmpBuf[j*bmpStep+i]; 43 m20+=x0*x0*pBmpBuf[j*bmpStep+i]; 44 m02+=y0*y0*pBmpBuf[j*bmpStep+i]; 45 m03+=y0*y0*y0*pBmpBuf[j*bmpStep+i]; 46 m30+=x0*x0*x0*pBmpBuf[j*bmpStep+i]; 47 m12+=x0*y0*y0*pBmpBuf[j*bmpStep+i]; 48 m21+=x0*x0*y0*pBmpBuf[j*bmpStep+i]; 49 } 50 } 51 52 // 计算规范化后的中心矩: mij/pow(m00,((i+j+2)/2) 53 u20=m20/pow(m00,2); 54 u02=m02/pow(m00,2); 55 u11=m11/pow(m00,2); 56 u30=m30/pow(m00,2.5); 57 u03=m03/pow(m00,2.5); 58 u12=m12/pow(m00,2.5); 59 u21=m21/pow(m00,2.5); 60 61 // 计算中间变量 62 t1=(u20-u02); 63 t2=(u30-3*u12); 64 t3=(3*u21-u03); 65 t4=(u30+u12); 66 t5=(u21+u03); 67 68 // 计算不变矩 69 M[0]=u20+u02; 70 M[1]=t1*t1+4*u11*u11; 71 M[2]=t2*t2+t3*t3; 72 M[3]=t4*t4+t5*t5; 73 M[4]=t2*t4*(t4*t4-3*t5*t5)+t3*t5*(3*t4*t4-t5*t5); 74 M[5]=t1*(t4*t4-t5*t5)+4*u11*t4*t5; 75 M[6]=t3*t4*(t4*t4-3*t5*t5)-t2*t5*(3*t4*t4-t5*t5); 76 77 returntrue; 78 }
②调用OpenCV方法 1 // 利用OpenCV函数求7个Hu矩 2 CvMoments moments; 3 CvHuMoments hu; 4 cvMoments(bkImgEdge,&moments,0); 5 cvGetHuMoments(&moments, &hu); 6 cout<<hu.hu1<<"/"<<hu.hu2<<"/"<<hu.hu3<<"/"<<hu.hu4<<"/"<<hu.hu5<<"/"<<hu.hu6<<"/"<<hu.hu7<<"/"<<"/"<<endl; 7 cvMoments(testImgEdge,&moments,0); 8 cvGetHuMoments(&moments, &hu); 9 cout<<hu.hu1<<"/"<<hu.hu2<<"/"<<hu.hu3<<"/"<<hu.hu4<<"/"<<hu.hu5<<"/"<<hu.hu6<<"/"<<hu.hu7<<"/"<<"/"<<endl; ------------------------------------------------------------------------------------------------------------------------------- 三 相似性准则 ①法一 // 计算相似度1 double dbR =0; //相似度 double dSigmaST =0; double dSigmaS =0; double dSigmaT =0; double temp =0; {for(int i=0;i<8;i++) { temp = fabs(Sa[i]*Ta[i]); dSigmaST+=temp; dSigmaS+=pow(Sa[i],2); dSigmaT+=pow(Ta[i],2); }} dbR = dSigmaST/(sqrt(dSigmaS)*sqrt(dSigmaT)); ②法二 1 // 计算相似度2 2 double dbR2 =0; //相似度 3 double temp2 =0; 4 double temp3 =0; 5 {for(int i=0;i<7;i++) 6 { 7 temp2 += fabs(Sa[i]-Ta[i]); 8 temp3 += fabs(Sa[i]+Ta[i]); 9 }} 10 dbR2 =1- (temp2*1.0)/(temp3);
PS:没看懂相似性准则 (记笔记于2017-03-09 15:54:24)