一、近似推断问题
马尔科夫蒙特卡洛(MCMC)采样是近似推断(Approximate Inference)的一种重要方法,其改进包括Metropolis-Hastings算法,Gibbs采样。
在MCMC不满足性能要求的时候,我们使用变分推断(Variational Inference,VI)。变分推断通过优化逼近后验,而MCMC通过采样逼近后验。
对观测数据(x = (x_1,ldots,x_n))和隐变量(z = (z_1,ldots,z_m)),推断问题(inference)希望计算出隐变量的后验概率(p(z|x)),利用贝叶斯公式重写后验概率如下公式。在确定隐变量z的先验概率(p(z))时,公式中的联合概率(p(z,x))能够计算,而(p(x))需要积分(p(x) = int p(z,x) dz)计算,但是通常,这个积分没有解析解,利用采样的方法计算效率也非常低。
二、变分分布和ELBO
变分推断选择一类分布族Q(称为变分分布族),将推断问题转换为优化(q^*in Q)使得与后验(p(z|x))的差别最小。
变分推断使用(KL[q||p])衡量变分分布(即分布q)和真实后验p之间的差别,KL散度是非对称的,这种形式的KL着重于惩罚真实后验p很小时变分概率q很大的情况。
我们无法最小化目标函数(KL[q||p]),因为KL中包含有(logp(x)),如下推导:
但是,通过上面公式的变化可以得到一个新的目标函数ELBO:
这个目标函数可以从两个方面来解释:
- 由于(logp(x))相对于(q(z))是一个常量,而我们想要最小化KL,(ELBO)等于负的KL加上一个常量,所以我们最大化(ELBO)就等价于最小化KL。
- 最大化(logp(x))就是对观测数据的极大似然估计(即
log evidence),由于KL是非负的,所以这个目标函数是极大似然估计的下确界(即evidence lower bound, ELBO)。
继续推导:
从结果来看,(ELBO)目标函数第一项是似然的期望,第二项是与先验之间的差别。所以最大化ELBO就是在(1)隐变量对观测数据的解释最佳和(2)变分分布q更靠近先验之间平衡。
三、平均场变分分布族
对变分推断中选择的变分分布族Q进行介绍。
由于分布族Q越复杂,变分推断的优化就越复杂。一般变分推断中会假定一个性质,就是选择的分布族是平均场变分分布族(mean-field variational family)。这个性质保证了每一个隐变量(z_j)都相互独立而且只受自己的分布(q_j)的参数影响(即满足(q(z) = prod_j q_j(z_j))))。如果隐变量互相有影响,那么这种变分推断被称为结构化变分推断。
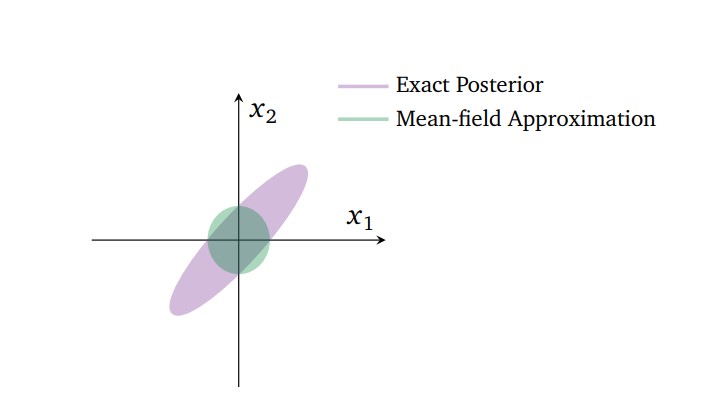
使用平均场变分分布族的缺点是,当隐变量之间互相有关联的时候(性质被破坏)逼近的效果就会下降。比如下图的二维高斯后验,(x_1)和(x_2)两个隐变量的后验概率是紫色的椭圆形部分,而我们使用mean-field approximation的时候,会学习到一个均值相同但协方差不同的二维高斯分布。
四、优化
针对平均场变分分布,坐标上升近似推断算法(CAVI)是最常见的优化方法。CAVI交替地更新每个隐变量,更新时固定其他的隐变量的变分分布参数,用来计算当前隐变量zj的坐标上升公式。CAVI的算法步骤如下图所示。

首先,我们计算最佳分布(q_j)的表达式:
因为在二阶泰勒展开的条件下(q= exp{log (E[p(cdot)]} * exp{ h(p(cdot)) }\),且(q^*_j(z_j)=E[p(z_j|z_{-j},x)]),故(q_j)与对数条件概率期望的指数成比例:
由于隐变量之间独立,这个公式右侧的期望项可以转化为:
因此,我们得到如下结论,也就是知道了联合分布的对数期望(而由于其他的隐变量确定,联合概率可求),就可以求最佳变分分布(q^*_j):
在平均场变分分布族的假设下,(ELBO)可以被分解为对每一个隐变量(z_j)的函数。根据隐变量分解后的(ELBO)中,利用(q)分布的平均场性质,第一项将联合概率的期望迭代求出,第二项分解了变分分布的期望。当我们最大化(q_j)时,也就最大化了分解后的(ELBO)。