简介
对于二维的纹理分析,具有很多潜在的应用。例如,工业表层检查,远程监控,生物制药图像分析等等领域。但是在实际应用时,会存在很多问题。主要的问题在于现实世界中的纹理并不像实验中的那么规整,存在着很多变化,例如:
- 由于非均匀光源导致的光照变化;
- 实际的情况下,物体方向是随机的;
- 空间尺度不一致。
而且,很多纹理分类的方法计算复杂度过高,难以实用化。为了解决这些问题,可以采用改进型的局部二值模式进行纹理分类。
改进型的局部二值模式(Local Binary Patterns)具有以下优点:
- 具有灰度不变性;
- 具有旋转不变性;
- 能够多分辨率分析;
并且,由于局部二值模式计算复杂度较低,因此,是一种很实用的图像处理方法。这里,我用简单的语言简述一下LBP的各种特性和纹理分类方法。
------------------------------------------------------------------------------------------------------------------
局部二值模式
首先,我们考虑一幅图像上的一个像素点,以及该像素点的八邻域。如下图(左)所示,我们考虑九宫格内的中心像素点,假设为“6”。周围像素点的数值如图上所示。这时,我们将八邻域中,数值大于等于中心像素点的记为“1”,数值小于中心像素点的记为“0”。这时,我们得到下图(右)。这就是基本的局部二值模式(Local Binary Patterns)。之所以叫作“二值”,是因为LBP之后的模式只有0和1两个数值(同理,可以定义三值模式)。
细心的人可能会发现,其实LBP操作相当于:以中心点灰度值做参考,进行局部二值化处理。
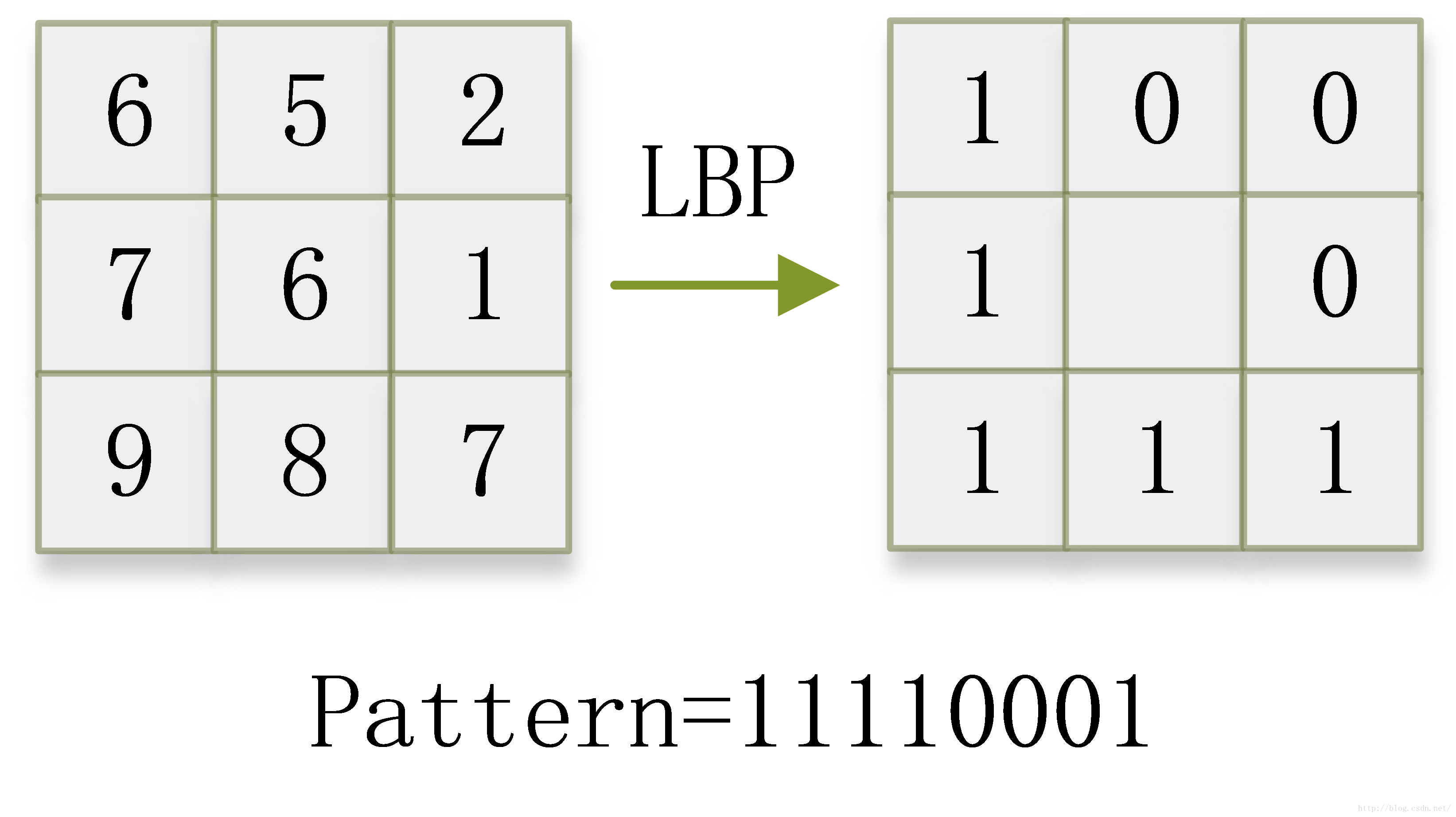
这时,我们定义左边中心像素为起始点,逆时针方向为正方向,然后按顺序数LBP的输出值,便会得到一个LBP编码。这样,我们就称中心像素点的LBP值为11110001。同样,我们对一幅图像的所有像素点进行LBP处理,每个像素点都有一个LBP值,这个值在十进制下介于0到255之间。这样得到的图像称为LBP特征图。
1.灰度不变性
通常,同样的物体具有同样的纹理特征,但不同时间段对物体的照相会因为光照的不同,导致亮度差异很大。但LBP具有灰度不变性的特征,可以抵抗光照变换所带来的影响。
如下图所示,第一幅图像经过LBP变换后得到LBP值为11110001。而第二幅图像的每个像素在第一幅图像的基础上都增加了50,进行LBP变换后,得到的LBP值仍然是11110001。因为LBP特征反应了局部亮度的相对变化,所以整体增加或减少一个值对LBP特征并没有大的影响,因此得到结论:差分分布对平均光强不敏感。

不过值得注意的是,该灰度不变性仅仅适用于灰度值的单调变化,也就是说,光照的变换要是线性的。
2.圆形局部二值模式
为了更加准确的反映纹理的特性,会采用“圆形”的局部二值模式(下面均是如此)。如下图所示,所谓的“圆形”,只是采样点的选择不同于八邻域。它以中心像素点为圆心,R(pixel)为半径画圆,在圆上均匀地选取P个点作为采样点。而后面的处理方法与前面的八邻域LBP方法一致。下图是R=1(pixel),P=8时的情况。
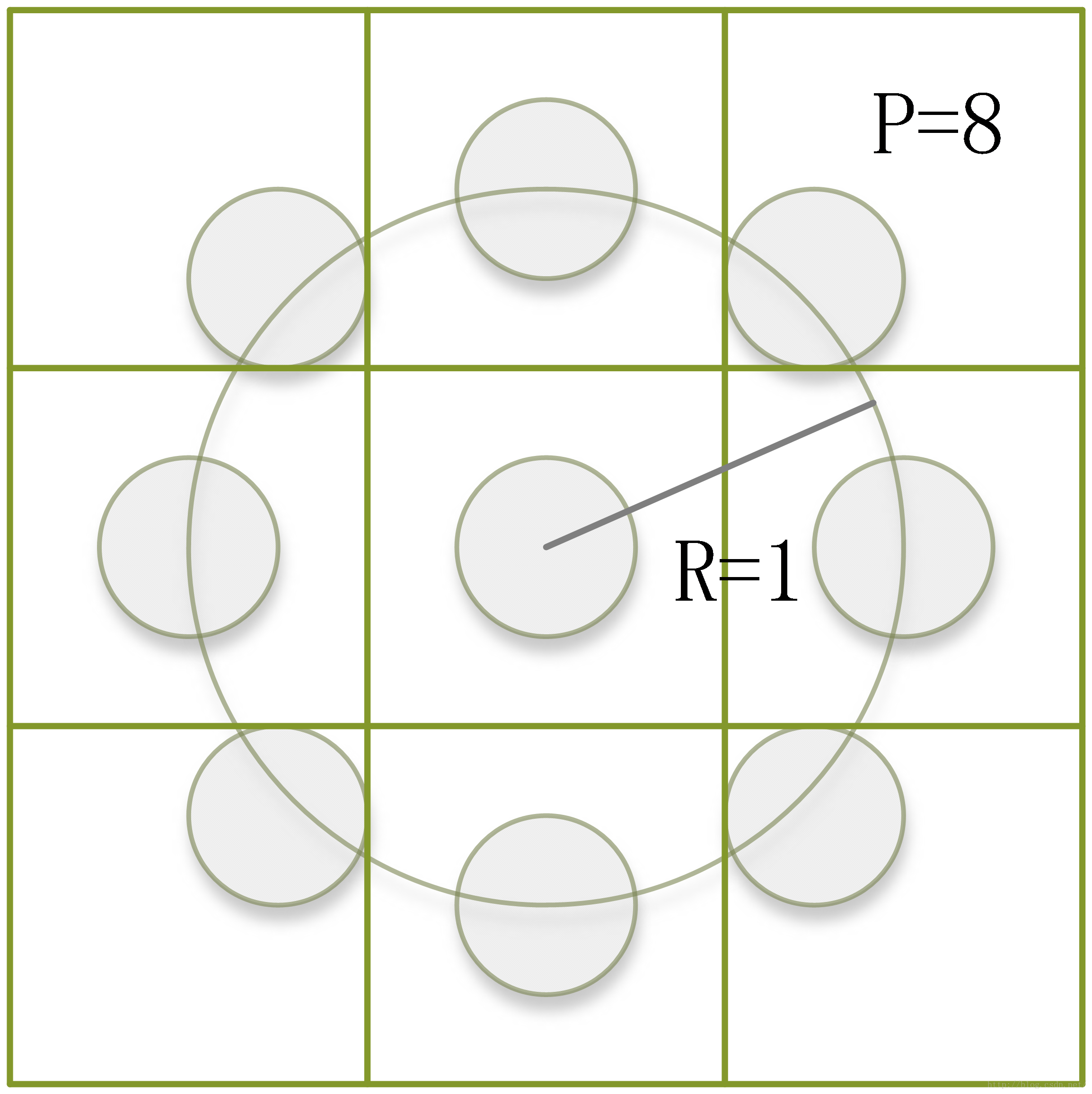
我们可以发现,R的大小决定了圆的大小,反映了二维空间的尺度;而P的大小决定了采样点数,反映了角度空间的分辨率。同样的,我们还可以改变R和P的值,实现不同的尺度和角度分辨率(如下图)。这也是以后“多分辨率分析”的理论基础。
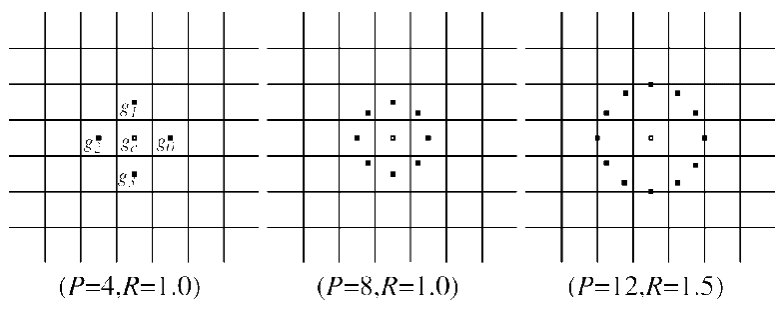
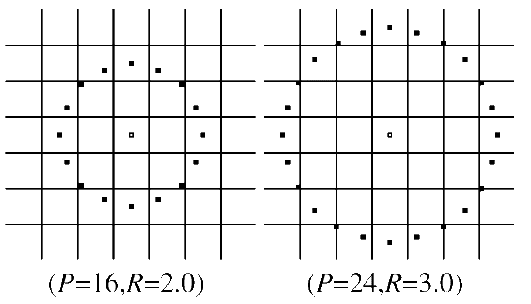
这里值得注意的是:由于采样点在圆上,所以不一定会准确的落在像素点中。因此可能需要对采样点位置进行插值获的采样点的像素估计值。
3.旋转不变性
对于下图的两个模式,其实只有方向不同,在实际中是同一个模式的不同状态。为了克服旋转带来的变化,引入了“旋转不变性”方法。
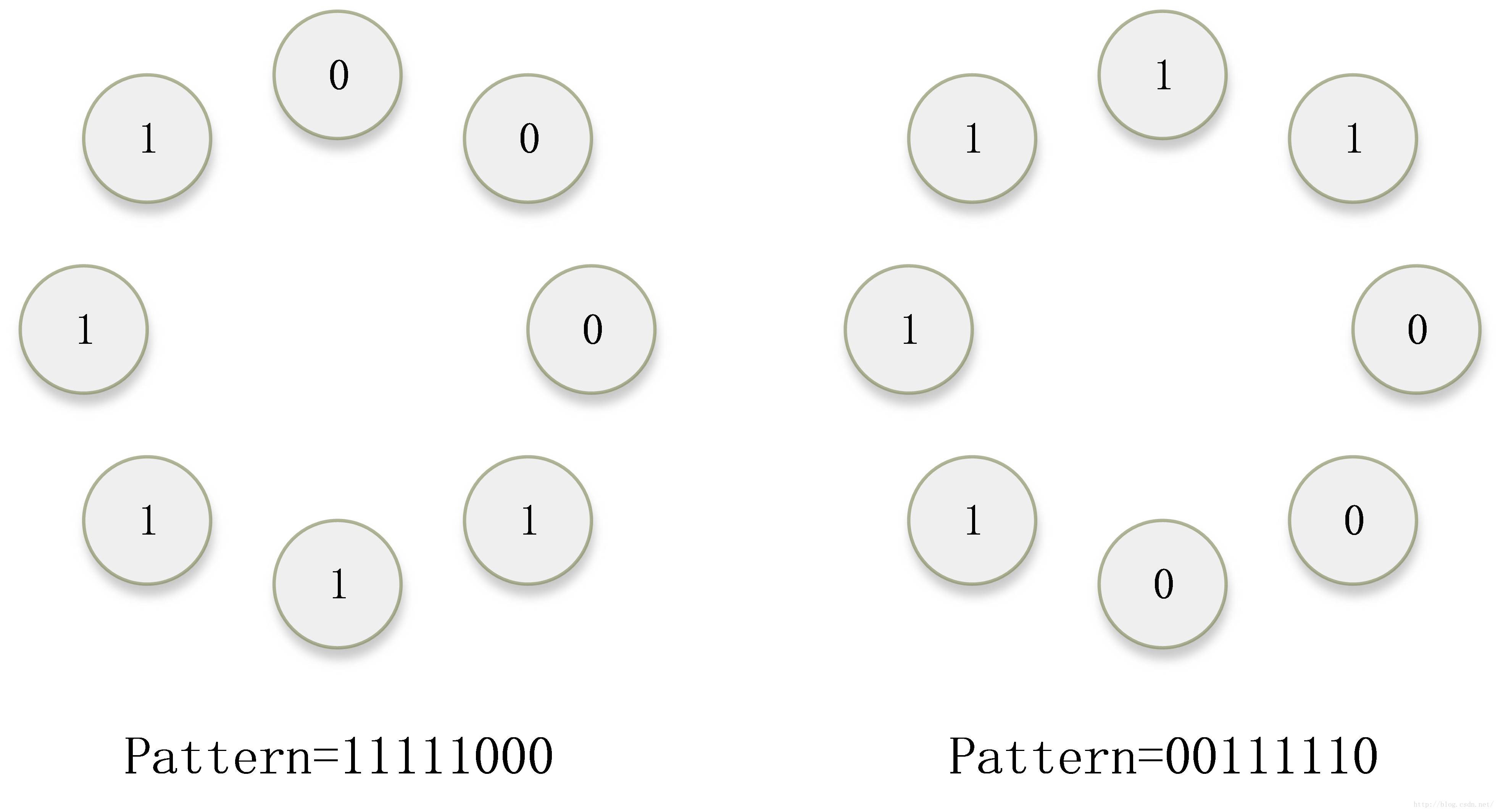
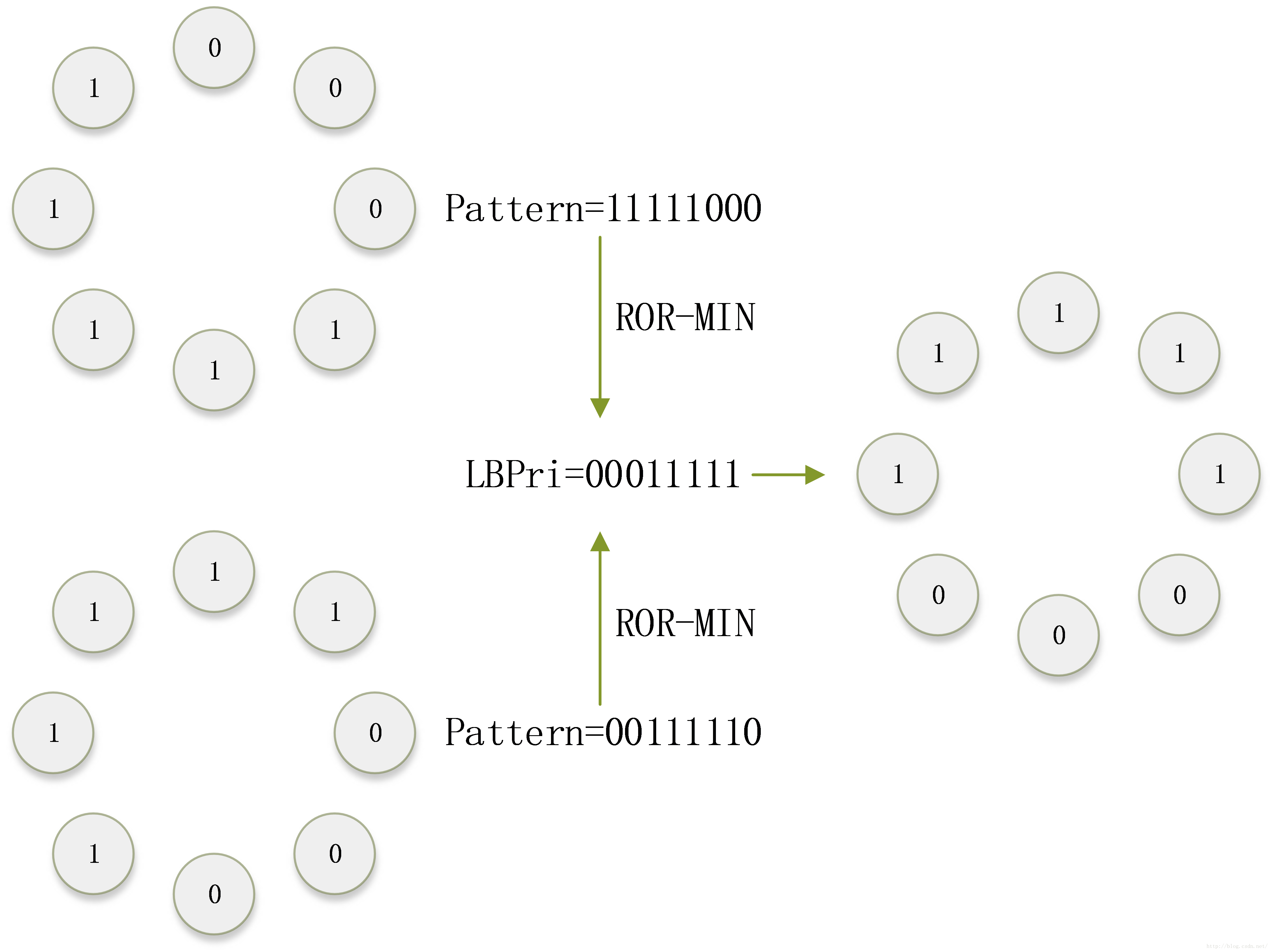
处理方法如下:两种模式各有一个LBP值,将这个LBP值不断的循环右移,并找到一个右移过程中最小的结果,作为新的LBP值。可见,这两种模式得到的新LBP值相同,属于同一种模式,从此解决了方向变化的问题。其中,"循环右移"的实质是对模式图案不断的旋转。"最小化"过程的实质是寻找能量最低的位置。
对于P=8的LBP,一共有8个采样点,每个采样点可能输出0或1,所以一共有256种局部二值模式。但其中有一些仅仅是方向不同,通过旋转之后可以重合。通过以上旋转不变性处理之后,256种LBP变为了具有“旋转不变性”的36种模式。如下图所示:(特点是任意两种模式经过任意旋转之后不会重合)

4.增强型旋转不变性
在实际应用中,我们经过统计会发现, 上图中第一行的9种模式最为常见,而后面的27种模式并不常见。如果将后面的27种模式每种单独分类,会因为它们出现概率太小,而具有一定的随机性,因此分类结果反而不稳定。因此,我们要对这种方法进行改进。
我们对每个LBP上的数值按顺序读一圈,将0->1和1->0变化的总次数记为U。对于上图可以发现,第一行模式的U值均小于等于2(反映了平坦或边缘区域),后面27种模式的U值均大于等于4(变化剧烈,不常见)。如下图。
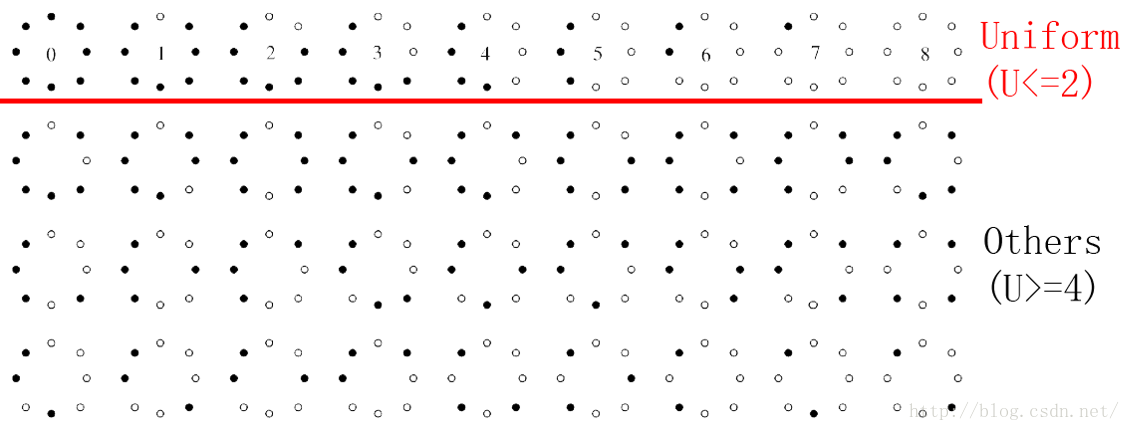
这样,对于一般LBP进行处理时,我们将U值小于等于2的LBP每个单独分为一类,而对于U值大于等于4的LBP全部归为一类,这样一共有P+2类。

对于P=8的情况下,原先分好的36个LBP就变成了10类。
5.非参数化分类原理
对于一幅图像,每个像素点均可以根据上述方法计算出一个LBP值,从而将这个像素归为(P+2)类中的一类。这样我们可以得到一个特征图,图中每点的数值代表像素点的类别,范围为:0~(P+1)。最终的纹理特征即为:LBP类别特征图的输出直方图。

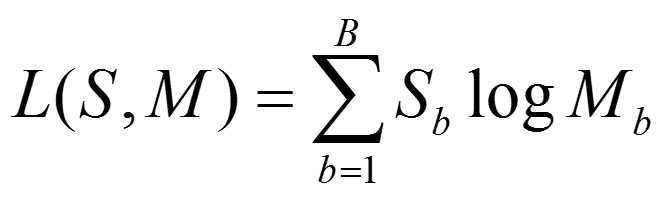
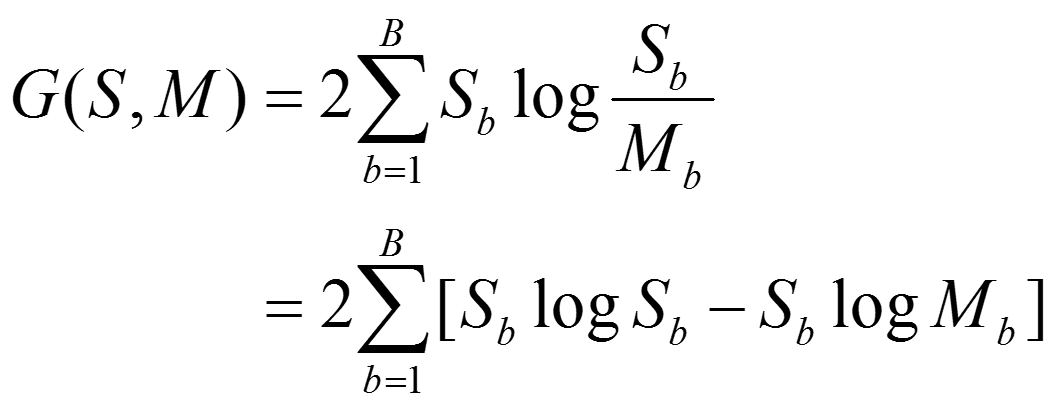
如果,样本图像记为S,待匹配的模型记为M。b代表类别,取值为b=1,2...B,其中B=P+2。
则样本S和模型M的匹配程度,使用最大对数似然(log-likelihood)统计方法表示:
而这个表达式,是下式(log-likelihood ratio)的一个简化版本:
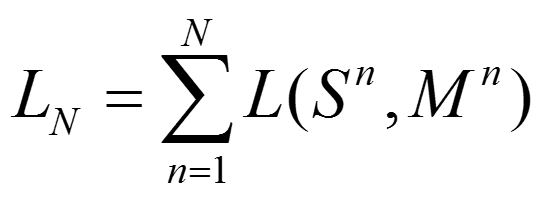
6.多分辨率分析
在前面的第2节,我们提到了多分辨率分析的基础是改变不同的R值和P值,实现不同的二维尺度分辨率和不同的角度空间分辨率。在第5节中交代了非参数分类的原则表达式。多分辨率分析,及改变不同的R值和P值,重复以上操作,最终将总的最大似然统计作为分类准则。如下公式所见,一共完成了N种不同的分辨率测度,最终的似然函数为:
如有任何疑问,欢迎一起讨论。
如要转载本文,请注明出处:http://blog.csdn.net/ws_20100/