通信信号源设计原理
通过设计一个DDS信号源,然后将该信号作为载波信号,再对基带信号进行2ASK、2FSK、2PSK、2DPSK调制,进而产生多种通信信号。
设计框图如下:

将PN序列进行2ASK、2FSK、2PSK、2DPSK调制,其中载波发生器提供三种不同的载波信号,按键设置用来选择当前DAC输出的最终调制信号,DAC输出模块将调制好的数字化波形转换为模拟信号。
PN序列采用的设计方法是m序列,采用3级寄存器生成7序列基带信号。
调制模块分别包含:2ASK、2FSK、2PSK、2DPSK这四种调制方式,可以通过按键选择所要输出的调制信号。
按键设置,主要分为按键消抖和按键编码,用来切换输出信号。
载波发生器,采用DDS的方法进行生成三种载波信号,分别为:500Hz(起始相位为0度),1K(起始相位为0度),1K(起始相位为180度)。
DAC输出模块,这是驱动TLC5615的硬件接口,用于将数字信号转换位模拟信号。
硬件原理图说明
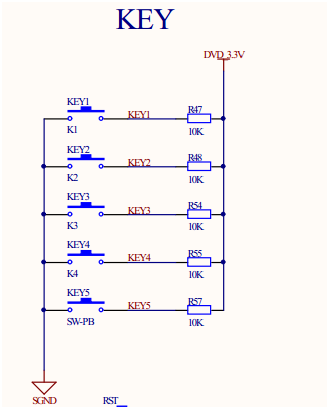
按键操作:
波形输出:
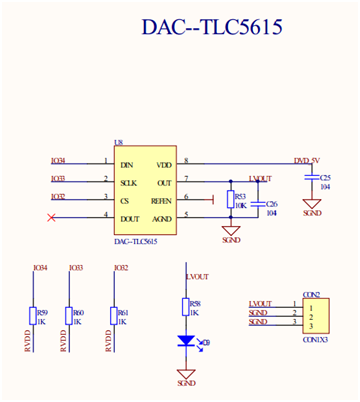
示波器要接LVOUT这个排针的引脚,旁边那个就是地;输出的是经过调制的正弦信号!
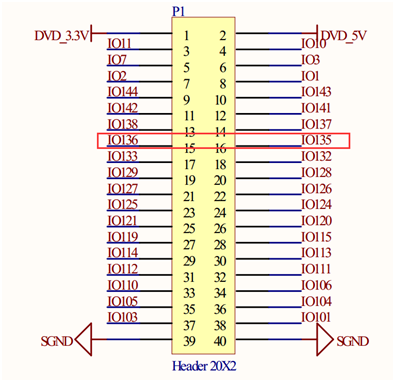
136是输出PN序列,135是输出pdsk调制。
将这两个信号接入示波器可以和前面的DAC输出进行对比。
实验代码

-
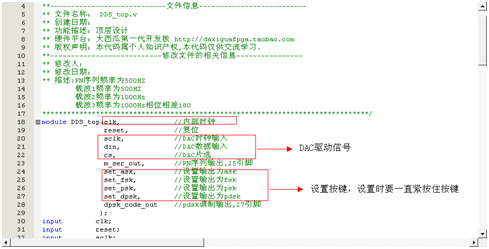
顶层接口模块:
|
/********************************版权声明************************************** ** 大西瓜团队 ** **----------------------------文件信息-------------------------- ** 文件名称: DDS_top.v ** 创建日期: ** 功能描述:顶层设计 ** 硬件平台:大西瓜第3代开发板 http://daxiguafpga.taobao.com ** 版权声明:本代码属个人知识产权,本代码仅供交流学习. **---------------------------修改文件的相关信息---------------- ** 修改人: ** 修改日期: ** 描述:PN序列频率为500HZ 载波1频率为500HZ 载波2频率为1000Hz 载波3频率为1000Hz相位相差180 *******************************************************************************/ module DDS_top(clk,//内部时钟 reset,//复位 sclk,//DAC时钟输入 din,//DAC数据输入 cs,//DAC片选 m_ser_out,//PN序列输出,25引脚 set_ask,//设置输出为ask set_fsk,//设置输出为fsk set_psk,//设置输出为psk set_dpsk,//设置输出为pdsk dpsk_code_out //pdsk调制输出,27引脚 ); input clk; input reset; output sclk; output din; output cs; input set_ask; input set_fsk; input set_psk; input set_dpsk; output m_ser_out; output dpsk_code_out; wire clk; wire reset; wire set_ask_line; wire set_fsk_line; wire set_psk_line; wire set_dpsk_line; wire clk_div; wire[9:0] data_line1; wire[9:0] data_line2; wire[9:0] data_line3; wire[9:0] ask_code_sin_out; wire[9:0] fsk_code_sin_out; wire[9:0] psk_code_sin_out; wire[9:0] dpsk_code_sin_out; wire[9:0] dac_data_in; DDS u4(.clk(clk), .reset_n(reset), .dds_data_out1(data_line1), .dds_data_out2(data_line2), .dds_data_out3(data_line3)); m_ser u5( .clk(clk),//sys clk .reset_n(reset),//sys reset_n .clk_div(clk_div), .m_ser_out(m_ser_out)//PN ser_code out ); ask_code u6( .clk(clk), .m_ser_code_in(m_ser_out), .dds_sin_data_in(data_line2),//10k正弦波 .ask_code_sin_out(ask_code_sin_out) ); fsk_code u7( .clk(clk), .m_ser_code_in(m_ser_out), .dds_sin_data_in1(data_line1),//1k正弦波 .dds_sin_data_in2(data_line2),//10k正弦波 .fsk_code_sin_out(fsk_code_sin_out) ); psk_code u8( .clk(clk), .m_ser_code_in(m_ser_out), .dds_sin_data_in2(data_line2),//10k正弦波 .dds_sin_data_in3(data_line3),//10k正弦波 .psk_code_sin_out(psk_code_sin_out) ); dpsk_code u9( .clk(clk_div),//sys 500Hz .reset_n(reset),// .m_ser_code_in(m_ser_out),//PN序列输入 .dpsk_code_out(dpsk_code_out),//dpsk调制输出 .dds_sin_data_in2(data_line2),//10k正弦波 .dds_sin_data_in3(data_line3),//10k正弦波,相位相差180 .dpsk_code_sin_out(dpsk_code_sin_out)// ); key u10(.clk(clk),.key(set_ask),.key_out(set_ask_line)); key u11(.clk(clk),.key(set_fsk),.key_out(set_fsk_line)); key u12(.clk(clk),.key(set_psk),.key_out(set_psk_line)); key u13(.clk(clk),.key(set_dpsk),.key_out(set_dpsk_line)); key_coding u14( .clk(clk), .reset_n(reset), .set_ask(set_ask_line), .set_fsk(set_fsk_line), .set_psk(set_psk_line), .set_dpsk(set_dpsk_line), .ask_code_sin_out(ask_code_sin_out),// .fsk_code_sin_out(fsk_code_sin_out),// .psk_code_sin_out(psk_code_sin_out),// .dpsk_code_sin_out(dpsk_code_sin_out),// .code_data_out(dac_data_in));// TLC5615 u15( .clk(clk), .sclk(sclk), .din(din), .cs(cs), .din_in(dac_data_in)); endmodule |
-
按键编码模块:
|
/********************************版权声明************************************** ** 大西瓜团队 ** **----------------------------文件信息-------------------------- ** 文件名称: key_coding.v ** 创建日期: ** 功能描述:按键编码 ** 硬件平台:大西瓜第3代开发板 http://daxiguafpga.taobao.com ** 版权声明:本代码属个人知识产权,本代码仅供交流学习. **---------------------------修改文件的相关信息---------------- ** 修改人: ** 修改日期: ** 修改内容: *******************************************************************************/ module key_coding( clk, reset_n, set_ask, set_fsk, set_psk, set_dpsk, ask_code_sin_out,// fsk_code_sin_out,// psk_code_sin_out,// dpsk_code_sin_out,// code_data_out // ); input clk; input reset_n; input set_ask; input set_fsk; input set_psk; input set_dpsk; input[9:0] ask_code_sin_out;// input[9:0] fsk_code_sin_out;// input[9:0] psk_code_sin_out;// input[9:0] dpsk_code_sin_out;// output[9:0] code_data_out; wire reset; wire set_ask; wire set_fsk; wire set_psk; wire set_dpsk; wire[9:0] ask_code_sin_out;// wire[9:0] fsk_code_sin_out;// wire[9:0] psk_code_sin_out;// wire[9:0] dpsk_code_sin_out;// reg[9:0] code_data_out; wire[3:0] set_mode_code; /******************调制模式选择****************************************/ assign set_mode_code={set_ask,set_fsk,set_psk,set_dpsk}; always@(posedge clk ornegedge reset_n) begin if(!reset_n) begin code_data_out<=10'd0; end else case(set_mode_code) 4'b0111:code_data_out<=ask_code_sin_out; 4'b1011:code_data_out<=fsk_code_sin_out; 4'b1101:code_data_out<=psk_code_sin_out; 4'b1110:code_data_out<=dpsk_code_sin_out; default:code_data_out<=ask_code_sin_out; endcase end endmodule |
-
按键消抖模块:
|
/********************************版权声明************************************** ** 大西瓜团队 ** **----------------------------文件信息-------------------------- ** 文件名称: key.v ** 创建日期: ** 功能描述:按键消抖 ** 硬件平台:大西瓜第3代开发板 http://daxiguafpga.taobao.com ** 版权声明:本代码属个人知识产权,本代码仅供交流学习. **---------------------------修改文件的相关信息---------------- ** 修改人: ** 修改日期: ** 修改内容: *******************************************************************************/ module key( clk, key, key_out); input clk; input key;//时钟输入,按键输入 output key_out;//经消抖后的按键信号输出 wire clk; wire key; reg key_out; parameter s0=2'b00,s1=2'b01,s2=2'b10,s3=2'b11; reg[1:0] state; always@(posedge clk) begin case(state) s0: begin key_out<=1'b1; if(key==1'b0) state<=s1; else state<=s0; end s1: begin if(key==1'b0) state<=s2; else state<=s0; end s2: begin if(key==1'b0) state<=s3; else state<=s0; end s3: begin if(key==1'b0) begin key_out<=1'b0; state<=s3; end else begin key_out<=1'b1; state<=s0; end end default: state<=s0; endcase end endmodule |
-
DDS模块:
|
/********************************版权声明************************************** ** 大西瓜团队 ** **----------------------------文件信息-------------------------- ** 文件名称: DDS.v ** 创建日期: ** 功能描述:DDS信号发生与嵌入式逻辑分析仪的调用 ** 硬件平台:大西瓜第3代开发板 http://daxiguafpga.taobao.com ** 版权声明:本代码属个人知识产权,本代码仅供交流学习. **---------------------------修改文件的相关信息---------------- ** 修改人: ** 修改日期: ** 修改内容: *******************************************************************************/ module DDS( clk, reset_n, dds_data_out1, dds_data_out2, dds_data_out3 ); input clk;//时钟输入 input reset_n; output[9:0] dds_data_out1; output[9:0] dds_data_out2; output[9:0] dds_data_out3; wire clk; wire reset_n; wire[9:0] dds_data_out1; wire[9:0] dds_data_out2; wire[9:0] dds_data_out3; //**************************************************// //******************产生载波1(500)**********************// //**************************************************// /**************连接线***************/ wire[31:0] f32_bus1;//AC频率控制字输入 wire[9:0] p_bus1; wire[31:0] reg32_out1;//32位寄存器输出 wire[31:0] reg32_in1;//32位寄存器输入 wire[9:0] reg10_in1; wire[9:0] reg10_out_address1; /************************************/ parameter[11:0] f32_bus_init1=12'd0; parameter[9:0] p10_bus_init1=10'd0;//设置初始相位 assign f32_bus1[31:20]=f32_bus_init1;//初始化,高位置低 assign f32_bus1[19:0]=20'd42950;//低位可以设置DDS的输出频率 assign p_bus1=p10_bus_init1; /*********************元件例化************************************/ adder_32 u1(.data1(f32_bus1),.data2(reg32_out1),.sum(reg32_in1)); reg32 u2(.clk(clk),.reset_n(reset_n),.data_in(reg32_in1),.data_out(reg32_out1)); adder_10 u3(.data1(p_bus1),.data2(reg32_out1[31:22]),.sum(reg10_in1)); reg_10 u4(.clk(clk),.reset_n(reset_n),.data_in(reg10_in1),.data_out(reg10_out_address1)); sin_rom u5(.address(reg10_out_address1),.clock(clk),.q(dds_data_out1));//正弦 //**************************************************// //******************产生载波2(1K)**********************// //**************************************************// /**************连接线***************/ wire[31:0] f32_bus2;//AC频率控制字输入 wire[9:0] p_bus2; wire[31:0] reg32_out2;//32位寄存器输出 wire[31:0] reg32_in2;//32位寄存器输入 wire[9:0] reg10_in2; wire[9:0] reg10_out_address2; /************************************/ parameter[11:0] f32_bus_init2=12'd0;// parameter[9:0] p10_bus_init2=10'd0;//设置初始相位 assign f32_bus2[31:20]=f32_bus_init2;//初始化,高位置低 assign f32_bus2[19:0]=20'd85899;//低位可以设置DDS的输出频率 assign p_bus2=p10_bus_init2; /*********************元件例化************************************/ adder_32 u6(.data1(f32_bus2),.data2(reg32_out2),.sum(reg32_in2)); reg32 u7(.clk(clk),.reset_n(reset_n),.data_in(reg32_in2),.data_out(reg32_out2)); adder_10 u8(.data1(p_bus2),.data2(reg32_out2[31:22]),.sum(reg10_in2)); reg_10 u9(.clk(clk),.reset_n(reset_n),.data_in(reg10_in2),.data_out(reg10_out_address2)); sin_rom u10(.address(reg10_out_address2),.clock(clk),.q(dds_data_out2));//正弦 //**************************************************// //******************产生载波3(1K,相位与2相反)**********************// //**************************************************// /**************连接线***************/ wire[31:0] f32_bus3;//AC频率控制字输入 wire[9:0] p_bus3; wire[31:0] reg32_out3;//32位寄存器输出 wire[31:0] reg32_in3;//32位寄存器输入 wire[9:0] reg10_in3; wire[9:0] reg10_out_address3; /************************************/ parameter[11:0] f32_bus_init3=12'd0;// parameter[9:0] p10_bus_init3=10'd512;//设置初始相位 assign f32_bus3[31:20]=f32_bus_init3;//初始化,高位置低 assign f32_bus3[19:0]=20'd85899;//低位可以设置DDS的输出频率 assign p_bus3=p10_bus_init3; /*********************元件例化************************************/ adder_32 u11(.data1(f32_bus3),.data2(reg32_out3),.sum(reg32_in3)); reg32 u12(.clk(clk),.reset_n(reset_n),.data_in(reg32_in3),.data_out(reg32_out3)); adder_10 u13(.data1(p_bus3),.data2(reg32_out3[31:22]),.sum(reg10_in3)); reg_10 u14(.clk(clk),.reset_n(reset_n),.data_in(reg10_in3),.data_out(reg10_out_address3)); sin_rom u15(.address(reg10_out_address3),.clock(clk),.q(dds_data_out3));//正弦 endmodule |
-
m序列生成模块:
|
module m_ser( clk,//sys clk reset_n,//sys reset_n clk_div, m_ser_out //PN ser_code out ); input clk; input reset_n; output clk_div; output m_ser_out; wire clk; wire reset_n; reg m_ser_out; reg[2:0] m_code; reg clk_div; reg[17:0]clk_cnt; always@(posedge clk ornegedge reset_n) begin if(!reset_n) begin clk_div<=1'b0; clk_cnt<=18'd0; end else if(clk_cnt==18'd49999)//500Hz PNcode begin clk_cnt<=18'd0; clk_div<=~clk_div; end else clk_cnt<=clk_cnt+1'b1; end always@(posedge clk_div ornegedge reset_n) begin if(!reset_n) begin m_code<=3'b001;//置数初始化 m_ser_out<=1'b0; end else begin m_code[2:1]<=m_code[1:0]; m_code[0]<=m_code[2]^ m_code[0];//将2和0进行异或然后放到0 m_ser_out<=m_code[2];//将2进行输出 end end endmodule |
ModelSim仿真过程
安装ModelSim软件之后,打开该文件夹
打开红色那个文件

点击project出现了仿真的文件
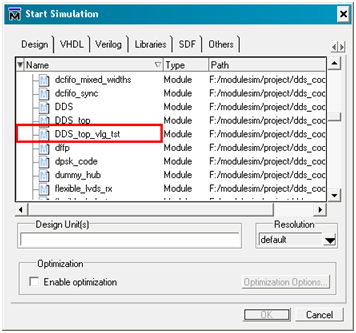
点击:start simulation
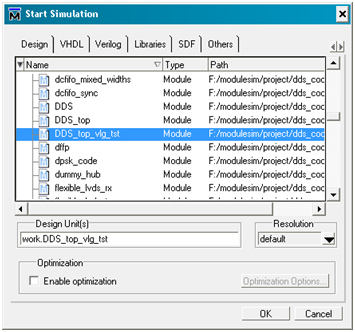
选择work
选择这个文件,然后点击OK

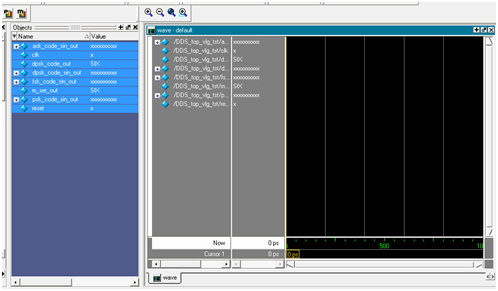
按住ctrl,选择这几个信号,然后右击:ADD TO WAVEàSELECTED SIGNAL.

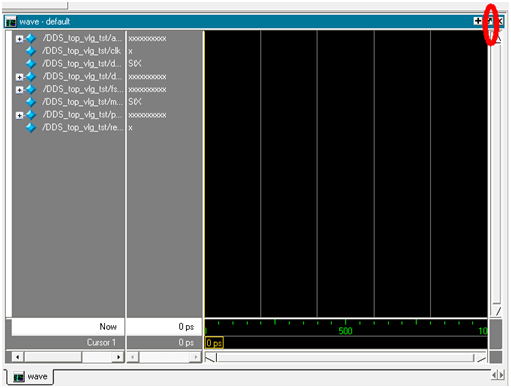
点击红圈,放大窗口
选择这几个信号
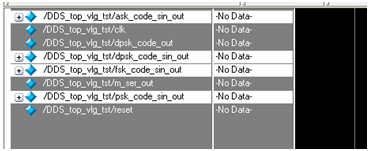
右击,radixàunsigned
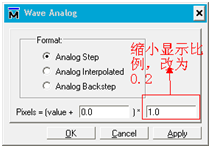
然后再右击:formatàanalog:
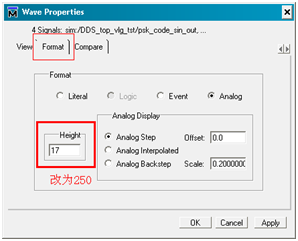
选择那四个信号,再右击properties,

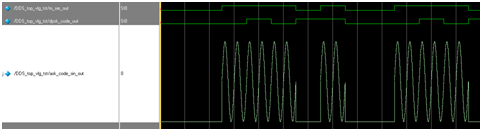
实验效果
2ASK
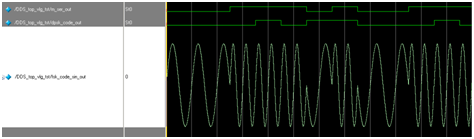
2FSK
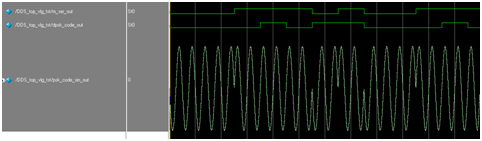
2PSK
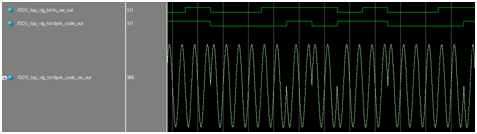
PN序列和DPSK序列

2DPSK
大西瓜FPGA-->https://daxiguafpga.taobao.com
博客资料、代码、图片、文字等属大西瓜FPGA所有,切勿用于商业! 若引用资料、代码、图片、文字等等请注明出处,谢谢!
每日推送不同科技解读,原创深耕解读当下科技,敬请关注微信公众号“科乎”。
