当service通信不能很好的完成任务时候, actionlib则可以比较适合实现长时间的通信过
程, actionlib通信过程可以随时被查看过程进度, 也可以终止请求, 这样的一个特性, 使得它
在一些特别的机制中拥有很高的效率。
1、通信原理
Action的工作原理是client-server模式, 也是一个双向的通信模式。 通信双方在ROS
Action Protocol下通过消息进行数据的交流通信。 client和server为用户提供一个简单的
API来请求目标( 在客户端) 或通过函数调用和回调来执行目标( 在服务器端) 。
工作模式的结构示意图如下:
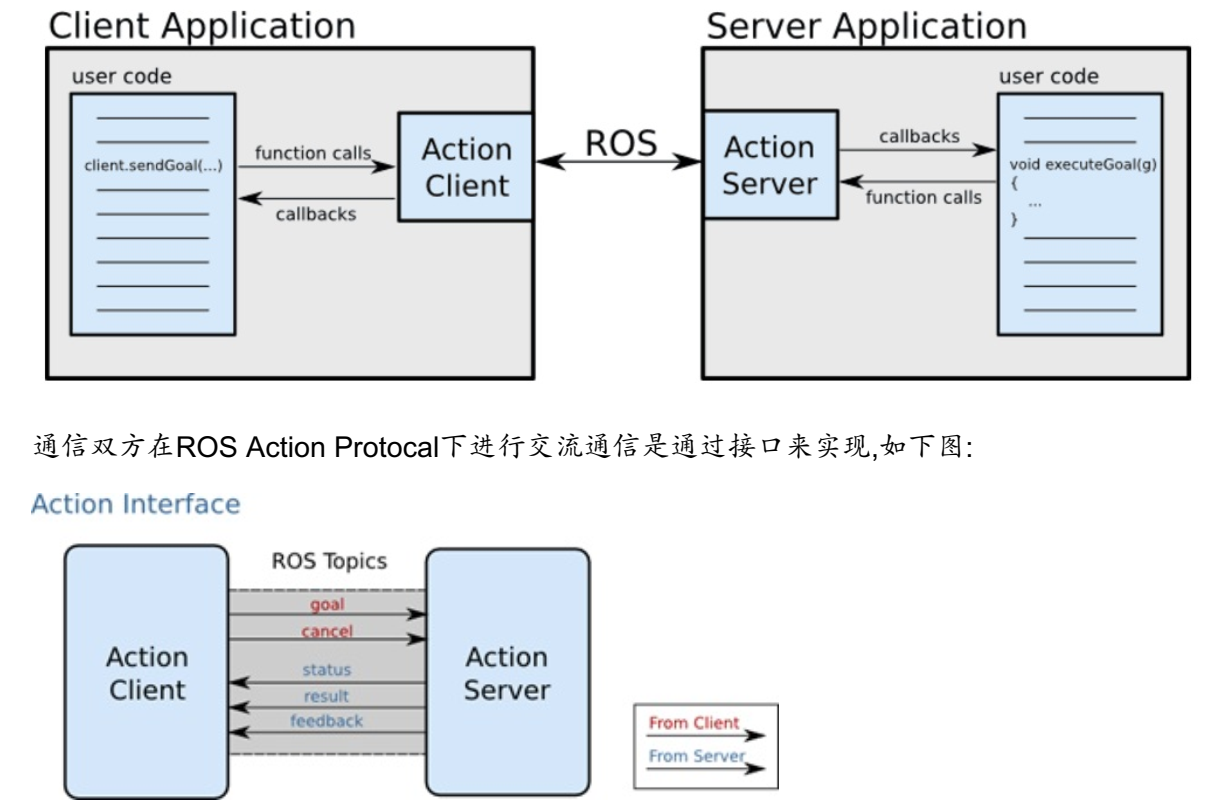
我们可以看到,客户端会向服务器发送目标指令和取消动作指令,而服务器则可以给客户端发送
实时的状态信息,结果信息,反馈信息等等,从而完成了service没法做到的部分.
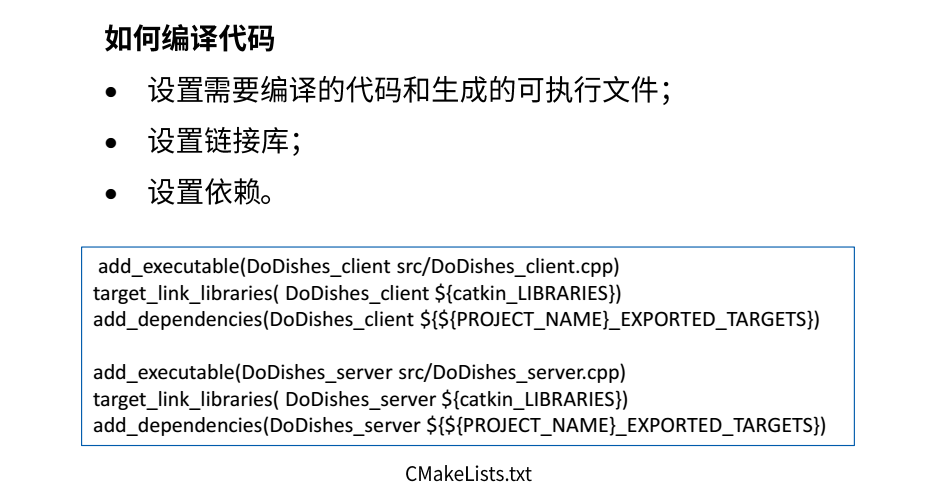
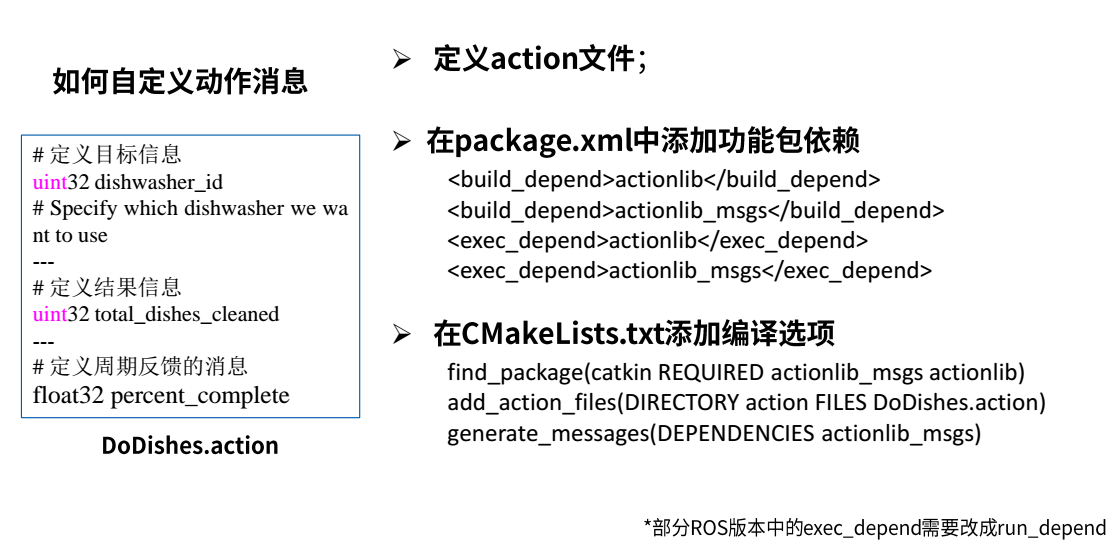
2、Action 规范
利用动作库进行请求响应, 动作的内容格式应包含三个部分, 目标、 反馈、 结果。
目标
机器人执行一个动作, 应该有明确的移动目标信息, 包括一些参数的设定, 方向、 角度、 速
度等等。 从而使机器人完成动作任务。
反馈
在动作进行的过程中, 应该有实时的状态信息反馈给服务器的实施者, 告诉实施者动作完成
的状态, 可以使实施者作出准确的判断去修正命令。
结果
当运动完成时, 动作服务器把本次运动的结果数据发送给客户端, 使客户端得到本次动作的
全部信息, 例如可能包含机器人的运动时长, 最终姿势等等
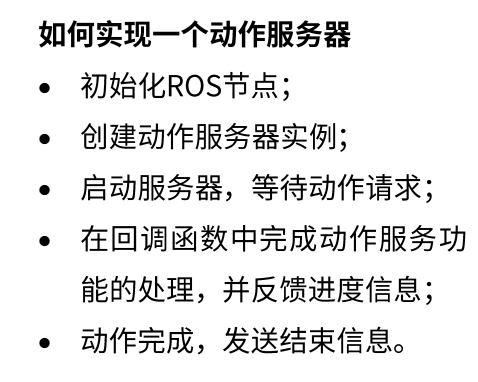
#include <ros/ros.h> #include <actionlib/server/simple_action_server.h> #include "learning_communication/DoDishesAction.h" typedef actionlib::SimpleActionServer<learning_communication::DoDishesAction> Server; // 收到action的goal后调用该回调函数 void execute(const learning_communication::DoDishesGoalConstPtr& goal, Server* as) { ros::Rate r(1); learning_communication::DoDishesFeedback feedback; ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id); // 假设洗盘子的进度,并且按照1hz的频率发布进度feedback for(int i=1; i<=10; i++) { feedback.percent_complete = i * 10; as->publishFeedback(feedback); r.sleep(); } // 当action完成后,向客户端返回结果 ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id); as->setSucceeded(); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_server"); ros::NodeHandle n; // 定义一个服务器 Server server(n, "do_dishes", boost::bind(&execute, _1, &server), false); // 服务器开始运行 server.start(); ros::spin(); return 0; }
#include <actionlib/client/simple_action_client.h> #include "learning_communication/DoDishesAction.h" typedef actionlib::SimpleActionClient<learning_communication::DoDishesAction> Client; // 当action完成后会调用该回调函数一次 void doneCb(const actionlib::SimpleClientGoalState& state, const learning_communication::DoDishesResultConstPtr& result) { ROS_INFO("Yay! The dishes are now clean"); ros::shutdown(); } // 当action激活后会调用该回调函数一次 void activeCb() { ROS_INFO("Goal just went active"); } // 收到feedback后调用该回调函数 void feedbackCb(const learning_communication::DoDishesFeedbackConstPtr& feedback) { ROS_INFO(" percent_complete : %f ", feedback->percent_complete); } int main(int argc, char** argv) { ros::init(argc, argv, "do_dishes_client"); // 定义一个客户端 Client client("do_dishes", true); // 等待服务器端 ROS_INFO("Waiting for action server to start."); client.waitForServer(); ROS_INFO("Action server started, sending goal."); // 创建一个action的goal learning_communication::DoDishesGoal goal; goal.dishwasher_id = 1; // 发送action的goal给服务器端,并且设置回调函数 client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb); ros::spin(); return 0; }