概率论基础
一、概率密度函数
1.1 定义


1.2 贝叶斯公式及推断
x是待估计的机器人所处的状态,y是传感器的测量

先验概率是通过对以往经验分析对状态进⾏估计得到的概率;后验概率指的在当前状态下,得到了⼀定的观测,或者造成了⼀定的效应,得到这个观测或者效应信息之后,对状态修正后的概率。
1.3 矩

1.4 样本均值和样本方差

更具体地说,这是因为N个样本的样本⽅差⾃由度是N−1,其中⼀个⾃由度因为均值⽽消去,所以归⼀化系数是1/(N−1)
1.5 统计独立性与不相关性

1.6 归一化积

1.7 负熵和互信息


1.8 克拉美罗下界和费歇尔信息量

我们⽤^来表⽰估计(estimated)量。
二、高斯概率密度函数
2.1 定义


2.2 Isserlis定理



2.3 联合高斯概率密度函数,分解与推断


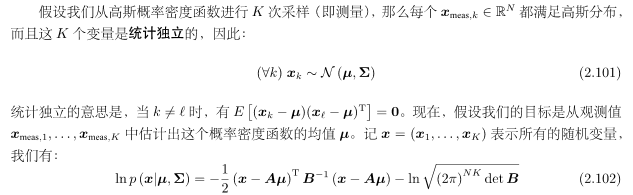
2.4 统计独立性,不相关性
 我们也可以从另⼀个⾓度来思考这件事。⾸先假设变量是不相关的,那么Σ
我们也可以从另⼀个⾓度来思考这件事。⾸先假设变量是不相关的,那么Σ
xy=0,于是它们是统计独⽴的。既然这些条件都是⼀样的,在⾼斯概率密度函数的情况下,就可以相互替代着使⽤统计独立和不相关的术语。
2.5 高斯分布随机变量的线性变换


2.6 高斯概率密度函数的归一化积


2.7 Sherman-Morrison-Woodbury等式
对于可逆矩阵,我们可以将它分解为⼀个下三⾓—对⾓—上三⾓(lower-diagonal-upper,LDU)形式或上三⾓—对⾓—下三⾓(upper-diagonal-lower,UDL)形式,如下所⽰:

2.8 高斯分布随机变量的非线性变换


闭式解就是解析解



2.9 高斯分布的香农信息




2.10 联合高斯概率密度函数的互信息

2.11 高斯概率密度函数的克拉美罗下界



三、高斯过程

