二值图像 b(x,y) = 1 表示前景部分,b(x,y) = 0 表示背景部分。其基本几何特性包括:‘
1 面积
对整个图像区域进行积分,使用零阶矩表示为  。
。
2 位置
将图像区域看作一种均匀物质构成得平面,物体得质心即为区域中心;使用一阶矩表示如下:
 ,
, ,进一步改写得:
,进一步改写得:
 ,
, 。
。
3 朝向
假设物体沿某一方向比较长,其正交方向比较短,该方向定义为物体朝向。使用最小转动惯量来定义物体长轴,即寻找一条直线,使得物体上所有点到直线上距离平方和最小,定义如下:
 , r 表示物体上点到直线的最小距离。
, r 表示物体上点到直线的最小距离。
通过最小化 E,可以计算出物体朝向直线,具体如下:
1)假设二值图像朝向直线已知,使用  定义为
定义为  ,如下图:
,如下图:
如上图所示,由于  ,可以建立等式
,可以建立等式
 ,化简得
,化简得
 。
。
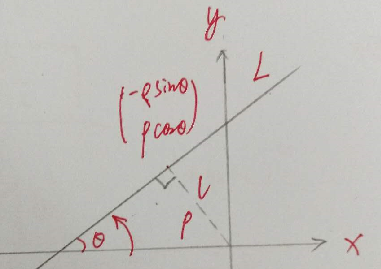
2)对直线 L 上任意点  ,以点
,以点  作为参考点,建立参数方程如下:
作为参考点,建立参数方程如下:
 ,s 表示点
,s 表示点  距离参考点 的距离。
距离参考点 的距离。
3)由于  ,(x,y) 表示图像上的点,
,(x,y) 表示图像上的点, 表示直线上的点,将参数方程带入该等式,使得两个变量
表示直线上的点,将参数方程带入该等式,使得两个变量  简化为一个变量 s,如下:
简化为一个变量 s,如下:
 ,
,
 ,
,
对 s 求导,当导数为零时表示(x,y)到直线 L 上距离最近  ,
,
计算得  ,将 s 带入
,将 s 带入  得
得
 ,
,
 ,最终推导出转动惯量方程为
,最终推导出转动惯量方程为
 ,其中,
,其中, 为待求解直线参数。
为待求解直线参数。
4)令  ,
, ,
,
将无关变量提出积分符号前 ,
,
同时除以  得
得  ,
,
由于  为图像中心,则最小转动惯量对应得轴过图像中心。
为图像中心,则最小转动惯量对应得轴过图像中心。
5)通过 4)结论,直线 L 的确定可转换为对选择角度的求解,具体如下:
令  ,将图像上点绝对坐标转换为相对于图像中心的相对坐标,带入直线 L 方程得:
,将图像上点绝对坐标转换为相对于图像中心的相对坐标,带入直线 L 方程得:
 ,重新改写
,重新改写  ,
,
当前 E 仅包含未知量  ,再次改写
,再次改写  ,其中
,其中
 ,
,
 ,
,
 ,
,
使用倍角公式  ,
,
 ,
, ,
,
通过以上分析,二值图像朝向直线为经过中心点,且满足  的 直线,其中,a, b, c 为图像二阶矩。
的 直线,其中,a, b, c 为图像二阶矩。
4 形状
在分析二值图像朝向时,,该方程是关于  的二次方程,
的二次方程,
其系数 a, b, c 为可构成一个 2*2 矩阵,通过分析该矩阵的特征值与特征向量可以估计出二值图像的形状,具体如下:
 ,通过分析特征值与特征向量,可的如下结论:
,通过分析特征值与特征向量,可的如下结论:
1)较大特征值对应的特征向量方向即为二值图像朝向;
2)两个特征值相差越小,二值图像越接近圆形。
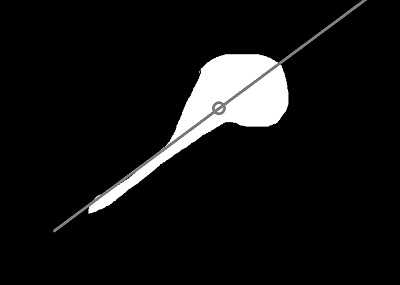
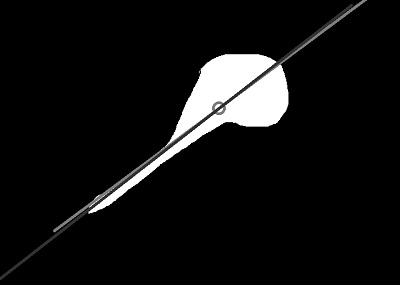
5 示例
以下给出代码,使用二阶矩计算二值图像朝向及形状,使用直线拟合计算二值图像朝向。可以发现,两种求朝向方案都可得到基本一致的结果。
1 cv::Mat img = cv::imread(str, IMREAD_GRAYSCALE); 2 cv::Mat img_show; 3 img.copyTo(img_show); 4 5 // 提取二值图像轮廓 6 std::vector<std::vector<cv::Point>> contours; 7 cv::findContours(img, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE); 8 if (contours.size() <= 0) 9 return; 10 11 // 只考虑每个图像上仅有一个二值图像 12 cv::Moments moms = cv::moments(cv::Mat(contours[0])); 13 double cx = moms.m10 / moms.m00; 14 double cy = moms.m01 / moms.m00; 15 double angle = atan2(moms.mu11 * 2., moms.mu20 - moms.mu02); 16 double tan = tanf(angle * .5); 17 double dx[2] = { -300., 300. }; 18 double dy[2] = { dx[0] * tan, dx[1] * tan }; 19 20 cv::Point pt1(cx + dx[0], cy + dy[0]); 21 cv::Point pt2(cx + dx[1], cy + dy[1]); 22 cv::circle(img_show, cv::Point(cx, cy), 10, cv::Scalar(125), 3); 23 cv::line(img_show, pt1, pt2, cv::Scalar(125), 3); 24 cv::imwrite("rst1.bmp", img_show); 25 26 // 计算二值图像圆形度 27 // 特征值比值(最大/最小)越接近1,圆形度越好 28 cv::Mat sym = cv::Mat::zeros(2, 2, CV_32FC1); 29 float *datasym = sym.ptr<float>(0); 30 datasym[0] = moms.mu20; 31 datasym[1] = moms.mu11; 32 datasym = sym.ptr<float>(1); 33 datasym[0] = moms.mu11; 34 datasym[1] = moms.mu02; 35 36 cv::Mat eg; 37 cv::eigen(sym, eg); 38 float e1 = eg.ptr<float>(0)[0]; 39 float e2 = eg.ptr<float>(1)[0]; 40 float circular = e1 / e2; 41 42 // 直线拟合 43 cv::Vec4f line_param; 44 cv::fitLine(contours[0], line_param, CV_DIST_L2, 0, .001, .001); 45 46 cv::Point pt0; 47 pt0.x = line_param[2]; 48 pt0.y = line_param[3]; 49 50 double k = line_param[1] / line_param[0]; 51 pt1.x = 0; 52 pt1.y = k * (0 - pt0.x) + pt0.y; 53 pt2.x = 480; 54 pt2.y = k * (480 - pt0.x) + pt0.y; 55 56 cv::line(img_show, pt1, pt2, cv::Scalar(50), 3); 57 cv::imwrite("rst2.bmp", img_show);
参考资料 Robot Vision Berthold Klaus Paul Horn