;1.
;===========================================================
;在保护模式下32位CPU仍然可以用20位地址来实现32位地址线寻址
;16位CPU: 16位段寄存器+16位偏移地址 (经地址加法器) -> 20位物理内存地址
;32位CPU: 32位地址的内存段信息存入在一张内存表中,只需将表的索引存入16寄存器当中即可
;保存表中索引的段寄存器称为:段选择子
;表中每个表示32位内存段信息称为:段描述符(保存了段的地址和段的长度)。
;整张表称为:段描述符表
;段选择子16位,其中高13位用来表示描述符表中的索引,其低3位用表示段描述符中所指向的段描述符的属性
;
;启动程序在屏幕中央打印一行字符串
[BITS 16]
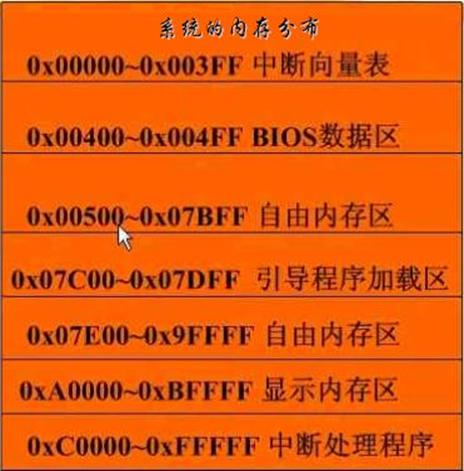
org 07c00h ;指明程序开始地址是07c00h,而不是原来 的00000
;int 汇编指令 int 10h
jmp main
gdt_table_start: ;告诉编译器段描述符开始
;Intel规定描述符表的第一个描述符必须是空描述符
gdt_null:
dd 0h
dd 0h ;Intel规定段描述符表的第一个表项必须为0
gdt_data_addr equ $-gdt_table_start ;数据段的开始位置
gdt_data: ;数据段描述符
dw 07ffh ;段界限
dw 0h ;段基地址18位
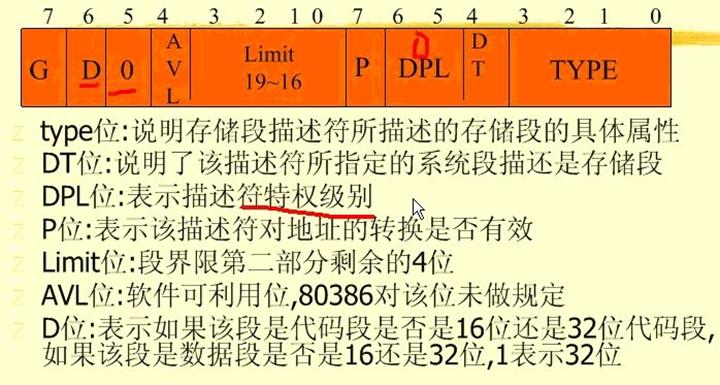
db 10010010b ;段描述符的第六个字节属性(数据段)
db 1100000b ;段描述符的第七个字节属性
db 0 ;段描述符的最后一个字节也就是段基地址
gdt_video_addr equ $-gdt_table_start
gdt_video: ;用来描述显存地址空间的段描述符
dw 0FFH ;显存段界限就是1M
dw 8000H
db 0BH
db 10010010b
db 11000000b
db 0
gdt_code_addr equ $-gdt_table_start ;代码段的开始位置
gdt_code:
dw 07ff ;段界限
dw 1h ;段基地址0~18位
db 80h ;段基地址19~23位
db 10011010b ;段描述符的第六个字节(代码段)
db 11000000b ;段描述符的第七个字节
db 0 ;段基地址的第二部分
gdt_table_end:

;通过lgdt指令可以把GDTR描述表的大小和起始地址存入gdtr寄存器中
gdtr_addr:
dw gdt_table_end-gdt_table_start-1 ;段描述表长度
dd gdt_table_start ;段描述表基地址
;lgdt [gdtr_addr] ;让CPU读取gdtr_addr所指向内存内容保存到gdtr寄存器当中
;A20地址线,切换到保护模式时,A20地址线必须开启。地址回绕作用,放弃32位CPU地址线的高12位。?
;端口的读写操作:
;in accume port ;将端口的内容读到寄存器AL或AX当中,其中accume只能是AL或AX。
;out port accume ;将accume中的内容写到端口中,这里accume可以是其它寄存器
;开启A20地址线
main:
;修改数据段描述跟段基地址有关的字节,初始化数据段描述符的基地址
xor eax,eax ;清空eax
add eax,data_32 ;将32位地址信息拷贝到eax中
mov word [gdt_data+2],ax ;把ax中的内容拷贝到段描述符的第3、4两个字节当中,因是word类型的拷贝?
shr eax,16 ;右移16位
mov byte [gdt_data+4],al ;将先前eax中的第5个字节移到段描述符当中
mov byte [gdt_data+7],ah ;将先前eax中的第8个字节移到段描述符当中
;修改代码段描述跟段基地址有关的字节,初始化数据段描述符的基地址
xor eax,eax
add eax,code_32
mov word [gdt_code+2]
shr eax,16
mov byte [gdt_code+4],al
mov byte [gdt_code+7],ah
;在转放保护模式之前,必须废除原来的中断向量表,用cli指令可以废除实模式下的中断向量表
cli
lgdt [gdtr_addr] ;让CPU读取gdtr_addr所指向内存内容保存到gdtr寄存器当中
enable_a20:
in al,92h ;只要往0x92号端口中写入信息就可以开启A20地址线
or al,00000010b ;00000010表示开启A20地址线的数据
out 92h,al ;把设置好的数据写进0x92号端口当中
;转入保护模式,只要将CR0寄存器的第1位(PE位)置为1即可

;80386提供了4个32位的控制寄存器CR0~CR3,其中CR0中的某些位是用来标志是否要进入保护模式
;CR1寄存器保留没有被使用
;CR2和CR3用于分页机制
;CR0的PE位控制分段管理机制,PE=0,CPU运行于实模式;PE=1,CPU运行于保护模式
;CR0的PG位控制分段管理机,PG=0,禁止分页管理机制;PG=1,启用分页管理机制。
mov eax,cr0
or eax,1 ;用于把CR0寄存器的第1置为1
mov cr0,eax ;把CR0寄存器的第1置为1
;跳转到保护模式中
jmp gdt_code_addr:0
;在保护模式下编程(在屏幕中央打印hello world)
[BITS 32]
data_32:
db "hello world"
code_32:
MOV ax,gdt_data_addr
mov ds,ax
mov ax,gdt_video_addr
mov gs,ax
mov cx,11
mov edi,(80*10+12)*2 ;在屏幕中央显示
mov bx,0
mov ah,0ch
s:mov al,[ds:bx]
mov [gs:edi]
mov [gs:edi+1],ah
inc bx
add edi,2
loop s
jmp $ ;死循环
times 510-($-$$) db 0
dw 0aa55h
;ok ! ^_^
;1.启动虚拟机,用nasm boot.asm -o boot.bin 编译
;2.把程序写到软盘镜像里去,用编译好的写入文件程序写入: ./write_image boot.bin boot.img
;3.将boot.img复制到自己在Bochs-2.4.6目录下建的文件夹下,并修改run.bat
;-----------------------------------------------
;其中write_image.c,可以在rad hat的vi编辑器这样写:?
#include<stdio.h>
#include<fcnt.h>
#include<sys/types.h>
#include<sys/stat.h>
int main(int argc,char *argv[])
{
int fd_source;
int fd_dest;
int read_count=0;
char buffer[512]={0};
fd_source=open("boot.bin",O_RDONLY);
IF(fd_source<0)
{
perror("open boot.bin error");
return 0;
}
fd_dest=open("virtual_floppy.vfd",O_WRONLY);
while ((read_count=read(fd_source,buffer,512))>0)
{
write(fd_dest,buffer,read_count);
memset(buffer,0,512);
}
printf("wrinte image OK !");
return 0;
}
;保存成write_image.c,然后编译:gcc write_image.c -o write_image
;用虚拟软盘制作工具,制作一个虚拟软盘(取名boot.img),最后再用它将引导程序写入boot.img
; ^_^ ok!
;启动程序有问题的话,可以用bocsh虚拟机对操作系统进行调试。
;===================================================
;bocsh的调试功能bocshdbg
; continue(c) 程序继续运行直到遇到断点为止
; step(s) 音步跟踪
; vbreak(vb) 在虚拟地址上设置一个断点
; pbreak(b) 在物理地址上设置一个断点
; lbreak(lb) 在线性地址上设置一个断点
; disassemble 反汇编指令
;================================================================
;================================================================
;2. 一个在屏幕中央显示一行字符串的引导程(实模式下写)
;启动程序在屏幕中央打印一行字符串
org 07c00h ;指明程序开始地址是07c00h,而不是原来 的00000
;int 汇编指令 int 10h
mov ax,cs
mov es,ax
mov bp,msgstr ;es:bp指向的内容就是我们要显示的字符串地址?
mov cx,12 ;字符串长度
mov dh,12 ;显示起始行号
mov dl,36 ;显示的列号
mov bh,0 ;显示的页数,在第0页显示
mov al,1 ;串结构
mov bl,0c ;黑底红字
msgstr: db "hello my os"
int 10h ;BIOS中断
times 510-($-$$) db 0 ;重复N次每次填充值为0
;因为BIOS的第一个扇区是512字节,当最后两字节是55AA时,它就是引导程序?
dw 55aaH
jmp $ ;为了不让程序结束,设置一个死循环,不断跳转到当前位置?
;在Linux操作系统下,用nasm 进行编译,命令:# nasm boot.asm -o boot.bin
;用 ndisasm boot.bin 可以进行反编译
注:引自大灰狼之视频教程《零基础汇编汇编视频课程》