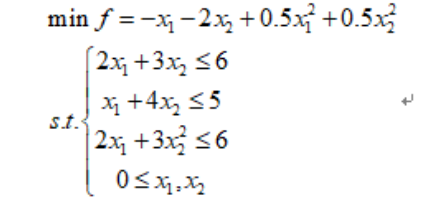
/* * main.c * * Created on: Oct 9, 2018 * Author: lgh */ #include <stdio.h> #include <math.h> #include "nlopt.h" #define INF 1e10 int i = 0; double step = 1; //目标函数; double utility(unsigned n, const double *x, double *grad, void *data) { if (grad) { grad[0] = (-1.0 + x[0])*step; grad[1] = (-2.0 + x[2])*step; } printf("迭代次数 i= %d, x[0]=%f, x[1]= %f,f(x1,x2)=%f ", i++, x[0], x[1], -x[0] - 2 * x[1] + 0.5*x[0] * x[0] + 0.5*x[1] * x[1]); return (-x[0] - 2 * x[1] + 0.5*x[0] * x[0] + 0.5*x[1] * x[1]); } //不等式限制条件; double inconstraint_1(unsigned n, const double *x, double *grad, void *data) { if (grad) { grad[0] = 2.0*step; grad[1] = 3.0*step; } return (2 * x[0] + 3 * x[1] - 6); } //不等式限制条件; double inconstraint_2(unsigned n, const double *x, double *grad, void *data) { if (grad) { grad[0] = 1.0*step; grad[1] = 4.0*step; } return (x[0] + 4 * x[1] - 5); } //不等式限制条件; double inconstraint_3(unsigned n, const double *x, double *grad, void *data) { if (grad) { grad[0] = 2.0*step; grad[1] = 6.0*x[1] * step; } return (2 * x[0] + 3 * x[1] * x[1] - 6); } int main(int argc, char const *argv[]) { double tol = 1e-4; double lb[2] = { 0,0 }; //x1、x2的下边界; double ub[2] = { INF,INF }; double x[2] = { 1, 1 }; //给x1、x2赋予初始值; double f_min; nlopt_opt opter = nlopt_create(NLOPT_LD_SLSQP/*NLOPT_LD_MMA*/, 2); //设置自变量下限; nlopt_set_lower_bounds(opter, lb); // 目标函数; nlopt_set_min_objective(opter, utility, NULL); // 不等式约束; nlopt_add_inequality_constraint(opter, inconstraint_1, NULL, tol); nlopt_add_inequality_constraint(opter, inconstraint_2, NULL, tol); nlopt_add_inequality_constraint(opter, inconstraint_3, NULL, tol); // 停止时需要的条件; nlopt_set_xtol_rel(opter, tol); // 开始优化; nlopt_result result = nlopt_optimize(opter, x, &f_min); if (result) { printf("极小值=%g, x=(%g,%g) ", f_min, x[0], x[1]); } //free nlopt_destroy(opter); getchar(); return 0; }