我的博客: https://www.luozhiyun.com/
浮点数和定点数
我们先来看一个问题,在Chrome浏览器里面通过开发者工具,打开浏览器里的Console,在里面输入“0.3 + 0.6”:
>>> 0.3 + 0.6
0.8999999999999999
下面我们来一步步解释,为什么会这样。
定点数
如果我们用32个比特表示整数,用4个比特来表示0~9的整数,那么32个比特就可以表示8个这样的整数。
然后我们把最右边的2个0~9的整数,当成小数部分;把左边6个0~9的整数,当成整数部分。这样,我们就可以用32个比特,来表示从0到999999.99这样1亿个实数了。
这种用二进制来表示十进制的编码方式,叫作BCD编码。这种小数点固定在某一位的方式,我们也就把它称为定点数。
缺点:
第一,这样的表示方式有点“浪费”。本来32个比特我们可以表示40亿个不同的数,但是在BCD编码下,只能表示1亿个数。
第二,这样的表示方式没办法同时表示很大的数字和很小的数字。
浮点数
我们在表示一个很大的数的时候,通常可以用科学计数法来表示。
在计算机里,我也可以用科学计数法来表示实数。浮点数的科学计数法的表示,有一个IEEE的标准,它定义了两个基本的格式。一个是用32比特表示单精度的浮点数,也就是我们常常说的float或者float32类型。另外一个是用64比特表示双精度的浮点数,也就是我们平时说的double或者float64类型。
单精度
单精度的32个比特可以分成三部分。

第一部分是一个符号位,用来表示是正数还是负数。我们一般用s来表示。在浮点数里,我们不像正数分符号数还是无符号数,所有的浮点数都是有符号的。
接下来是一个8个比特组成的指数位。我们一般用e来表示。8个比特能够表示的整数空间,就是0~255。我们在这里用1~254映射到-126~127这254个有正有负的数上。
最后,是一个23个比特组成的有效数位。我们用f来表示。综合科学计数法,我们的浮点数就可以表示成下面这样:
$(-1)s×1.f×2e$
特殊值的表示:
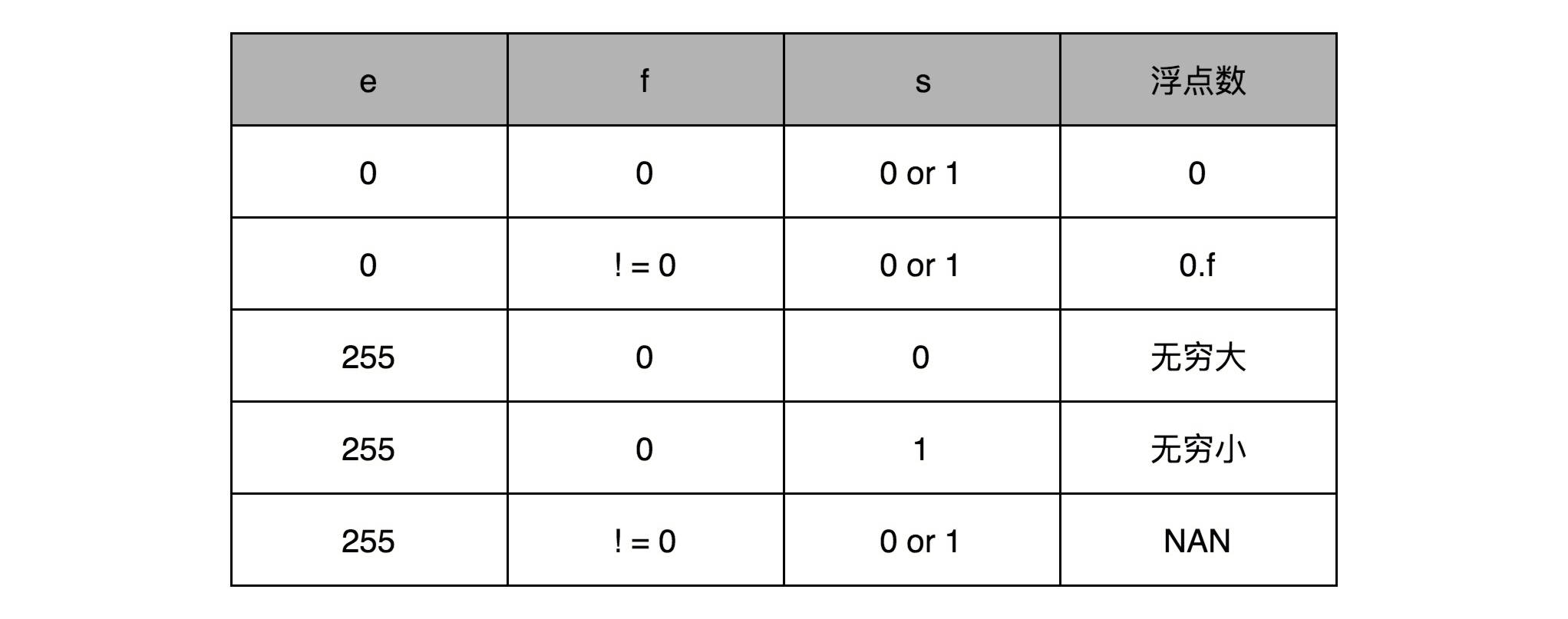
以0.5为例子。0.5的符号为s应该是0,f应该是0,而e应该是-1,也就是
$0.5= (-1)0×1.0×2{-1}=0.5$,对应的浮点数表示,就是32个比特。
不考虑符号的话,浮点数能够表示的最小的数和最大的数,差不多是$1.17×10{-38}$和$3.40×10{38}$。
回到我们最开头,为什么我们用0.3 + 0.6不能得到0.9呢?这是因为,浮点数没有办法精确表示0.3、0.6和0.9。
浮点数的二进制转化
我们输入一个任意的十进制浮点数,背后都会对应一个二进制表示。
比如:9.1,那么,首先,我们把这个数的整数部分,变成一个二进制。这里的9,换算之后就是1001。
接着,我们把对应的小数部分也换算成二进制。和整数的二进制表示采用“除以2,然后看余数”的方式相比,小数部分转换成二进制是用一个相似的反方向操作,就是乘以2,然后看看是否超过1。如果超过1,我们就记下1,并把结果减去1,进一步循环操作。在这里,我们就会看到,0.1其实变成了一个无限循环的二进制小数,0.000110011。这里的“0011”会无限循环下去。
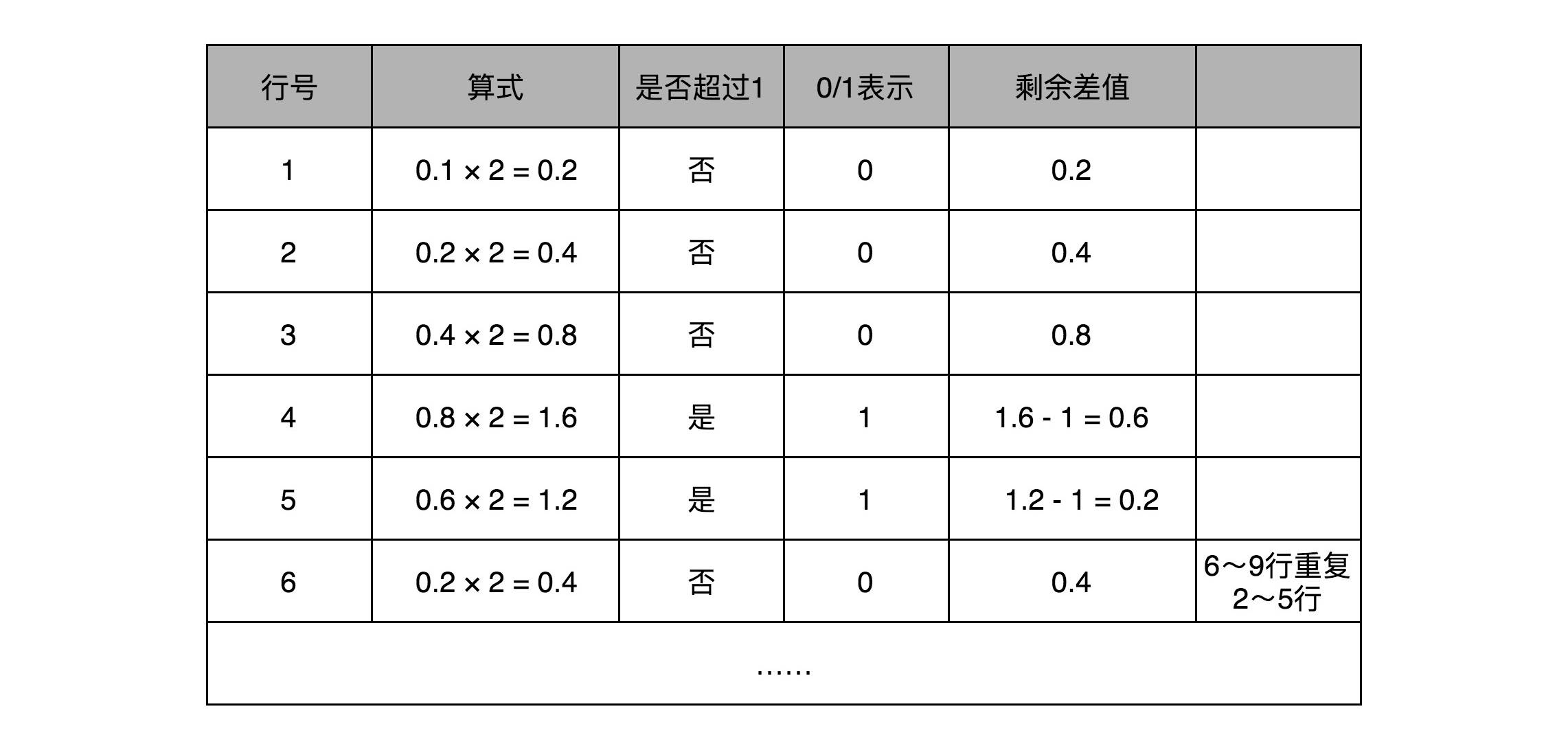
结果就是:$1.0010$$0011$$0011… × 2^3$
这里的符号位s = 0,对应的有效位f=001000110011…。因为f最长只有23位,那这里“0011”无限循环,最多到23位就截止了。于是,f=00100011001100110011 001。最后的一个“0011”循环中的最后一个“1”会被截断掉。
对应的指数为e,代表的应该是3。因为指数位有正又有负,所以指数位在127之前代表负数,之后代表正数,那3其实对应的是加上127的偏移量130,转化成二进制,就是130,对应的就是指数位的二进制,表示出来就是10000010。

最终得到的二进制表示就变成了:
010000010 0010 0011001100110011 001
如果我们再把这个浮点数表示换算成十进制, 实际准确的值是9.09999942779541015625。
浮点数的加法和精度损失
浮点数的加法是:先对齐、再计算。
那我们在计算0.5+0.125的浮点数运算的时候,首先要把两个的指数位对齐,也就是把指数位都统一成两个其中较大的-1。对应的有效位1.00…也要对应右移两位,因为f前面有一个默认的1,所以就会变成0.01。然后我们计算两者相加的有效位1.f,就变成了有效位1.01,而指数位是-1,这样就得到了我们想要的加法后的结果。

其中指数位较小的数,需要在有效位进行右移,在右移的过程中,最右侧的有效位就被丢弃掉了。这会导致对应的指数位较小的数,在加法发生之前,就丢失精度。
指令周期(Instruction Cycle)
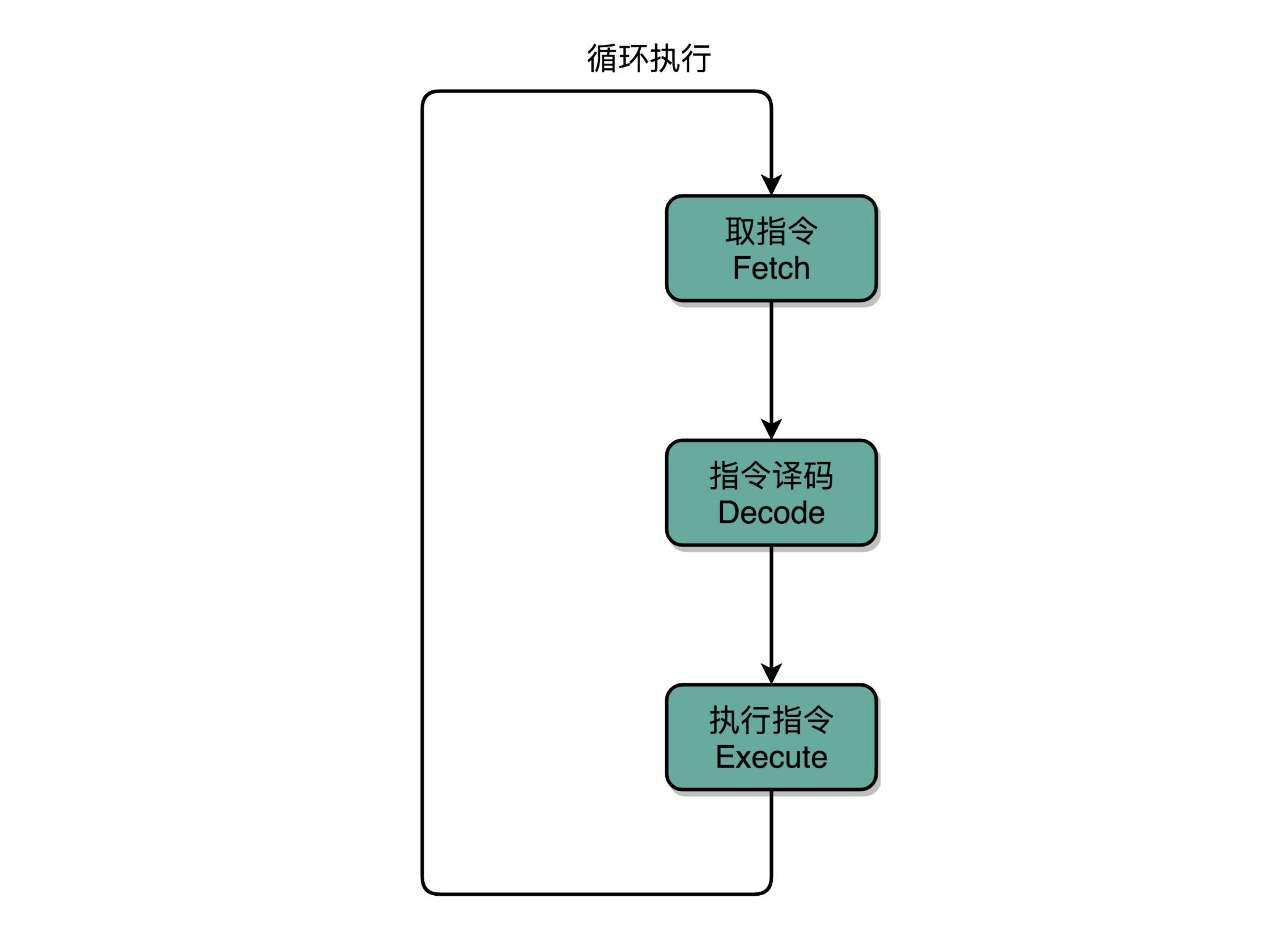
计算机每执行一条指令的过程,可以分解成这样几个步骤。
- Fetch(取得指令),也就是从PC寄存器里找到对应的指令地址,根据指令地址从内存里把具体的指令,加载到指令寄存器中,然后把PC寄存器自增,好在未来执行下一条指令。
- Decode(指令译码),也就是根据指令寄存器里面的指令,解析成要进行什么样的操作,是R、I、J中的哪一种指令,具体要操作哪些寄存器、数据或者内存地址。
- Execute(执行指令),也就是实际运行对应的R、I、J这些特定的指令,进行算术逻辑操作、数据传输或者直接的地址跳转。
Fetch - Decode - Execute循环称之为指令周期(Instruction Cycle)。
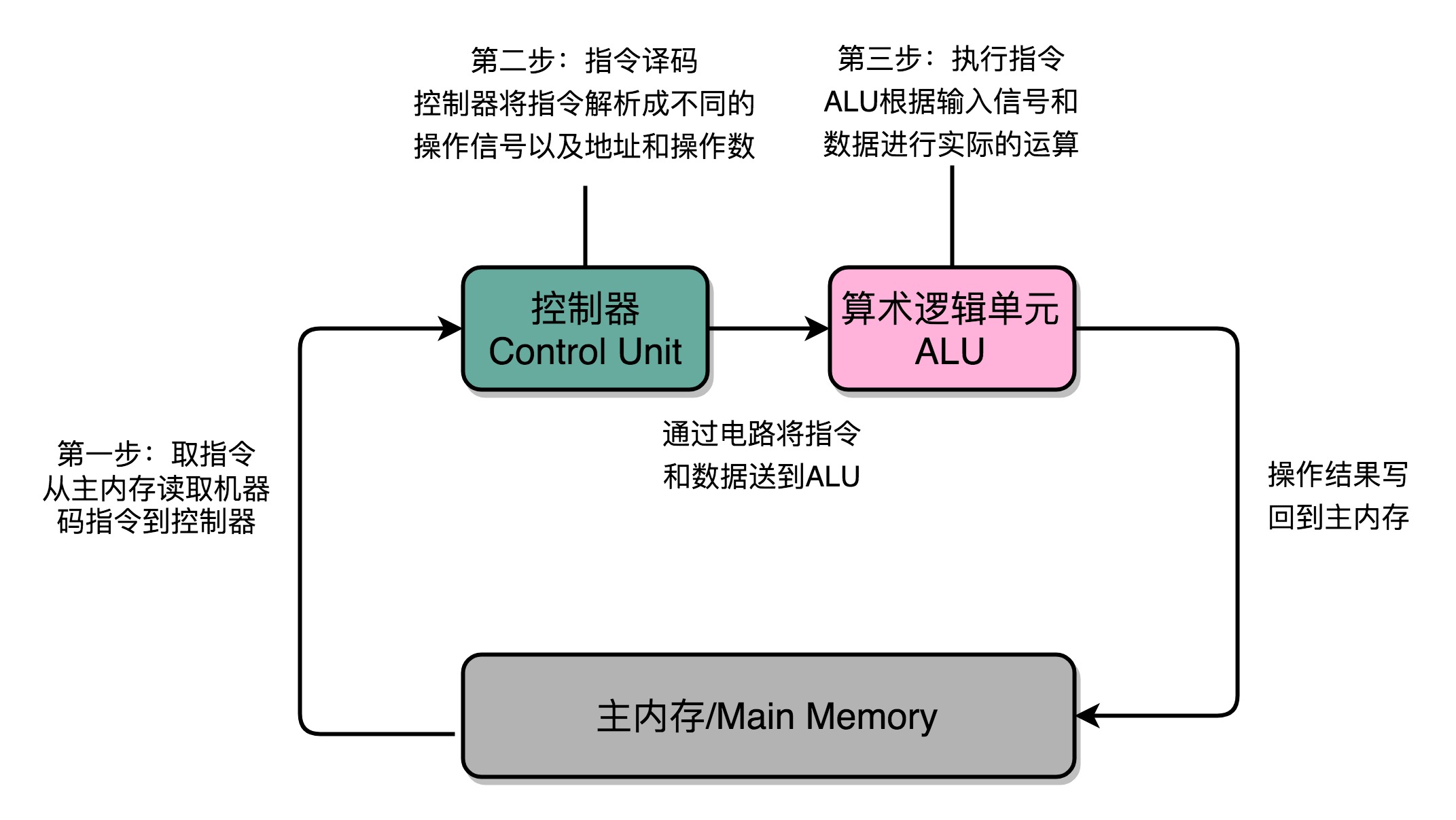
在取指令的阶段,我们的指令是放在存储器里的,实际上,通过PC寄存器和指令寄存器取出指令的过程,是由控制器(Control Unit)操作的。指令的解码过程,也是由控制器进行的。一旦到了执行指令阶段,无论是进行算术操作、逻辑操作的R型指令,还是进行数据传输、条件分支的I型指令,都是由算术逻辑单元(ALU)操作的,也就是由运算器处理的。不过,如果是一个简单的无条件地址跳转,那么我们可以直接在控制器里面完成,不需要用到运算器。
时序逻辑电路
有一些电路,只需要给定输入,就能得到固定的输出。这样的电路,我们称之为组合逻辑电路(Combinational Logic Circuit)。
时序逻辑电路有以下几个特点:
- 自动运行,时序电路接通之后可以不停地开启和关闭开关,进入一个自动运行的状态。
- 存储。通过时序电路实现的触发器,能把计算结果存储在特定的电路里面,而不是像组合逻辑电路那样,一旦输入有任何改变,对应的输出也会改变。
- 时序电路使得不同的事件按照时间顺序发生。
最常见的就是D触发器,电路的输出信号不单单取决于当前的输入信号,还要取决于输出信号之前的状态。
PC寄存器
PC寄存器就是程序计数器。
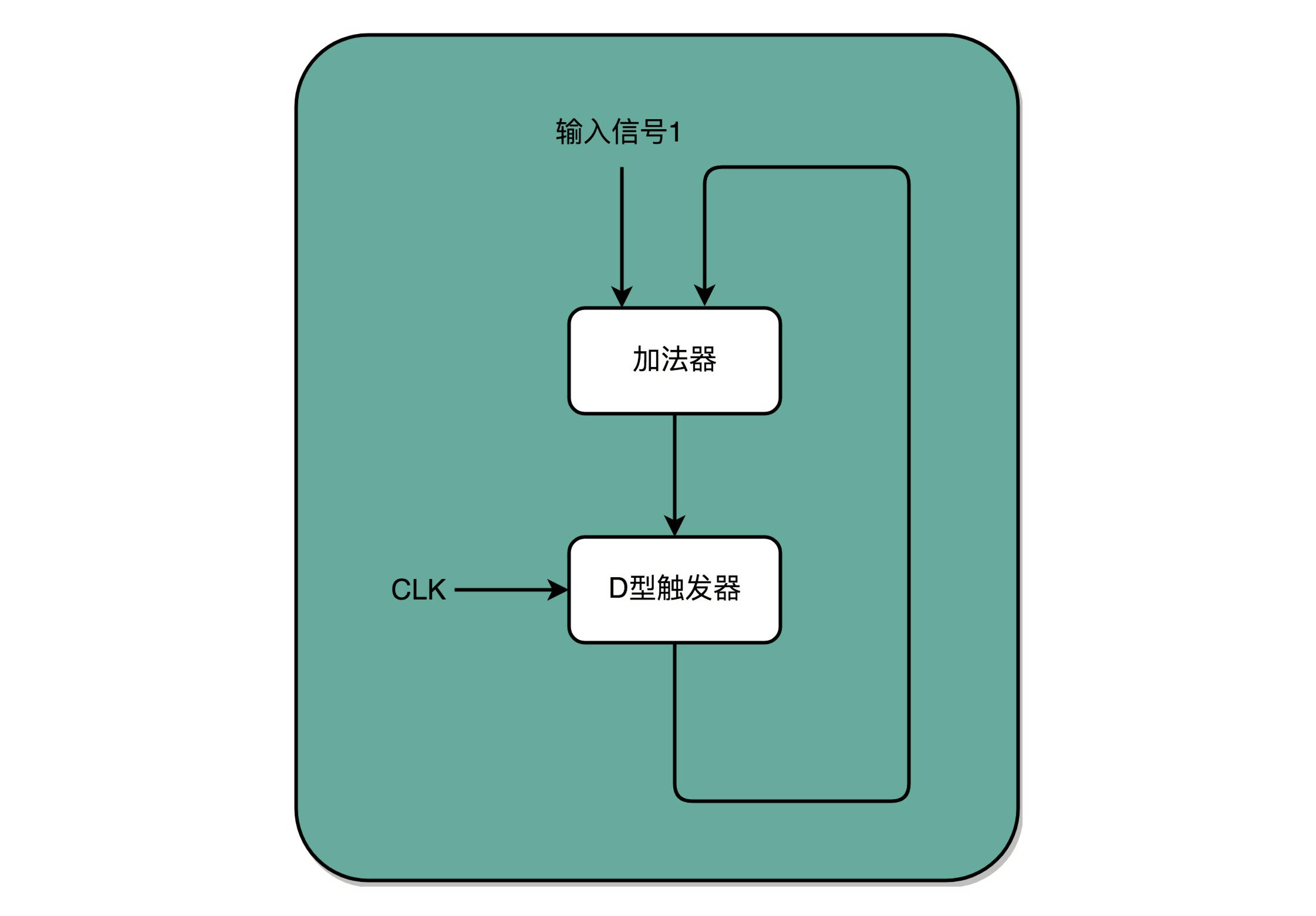
加法器的两个输入,一个始终设置成1,另外一个来自于一个D型触发器A。我们把加法器的输出结果,写到这个D型触发器A里面。于是,D型触发器里面的数据就会在固定的时钟信号为1的时候更新一次。
这样,我们就有了一个每过一个时钟周期,就能固定自增1的自动计数器了。
最简单的CPU流程
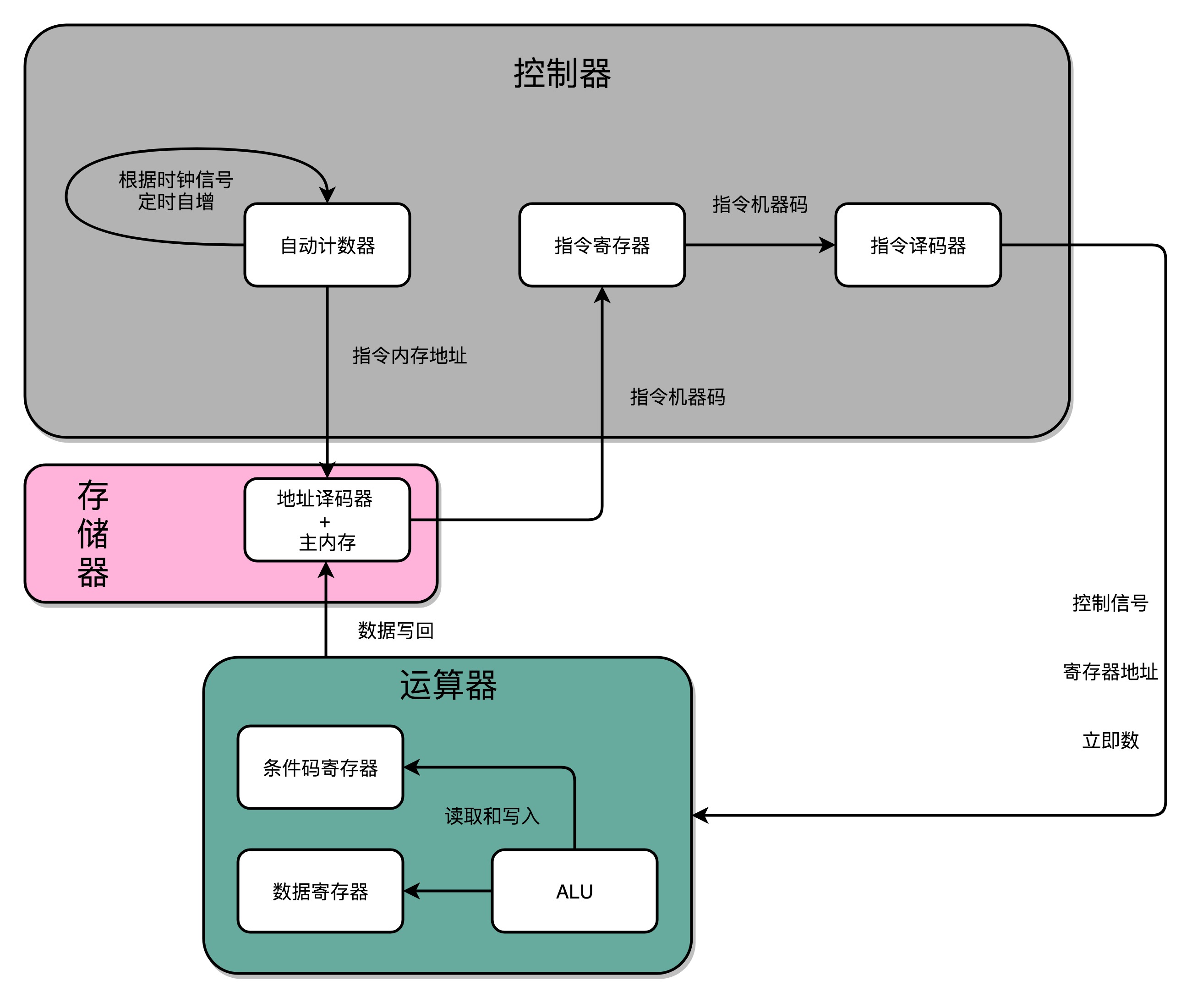

- 首先,有一个自动计数器会随着时钟主频不断地自增,来作为我们的PC寄存器。
- 在这个自动计数器的后面,我们连上一个译码器(用来寻址,将指令内存地址转换成指令)。译码器还要同时连着我们通过大量的D触发器组成的内存。
- 自动计数器会随着时钟主频不断自增,从译码器当中,找到对应的计数器所表示的内存地址,然后读取出里面的CPU指令。
- 读取出来的CPU指令会通过我们的CPU时钟的控制,写入到一个由D触发器组成的寄存器,也就是指令寄存器当中。
- 在指令寄存器后面,我们可以再跟一个译码器。这个译码器不再是用来寻址的了,而是把我们拿到的指令,解析成opcode和对应的操作数。
- 当我们拿到对应的opcode和操作数,对应的输出线路就要连接ALU,开始进行各种算术和逻辑运算。对应的计算结果,则会再写回到D触发器组成的寄存器或者内存当中。
指令流水线
指令流水线指的是把一个指令拆分成一个一个小步骤,从而来减少单条指令执行的“延时”。通过同时在执行多条指令的不同阶段,我们提升了CPU的“吞吐率”。
如果我们把一个指令拆分成“取指令-指令译码-执行指令”这样三个部分,那这就是一个三级的流水线。如果我们进一步把“执行指令”拆分成“ALU计算(指令执行)-内存访问-数据写回”,那么它就会变成一个五级的流水线。
五级的流水线,就表示我们在同一个时钟周期里面,同时运行五条指令的不同阶段。
我们可以看这样一个例子。我们顺序执行这样三条指令。
- 一条整数的加法,需要200ps。
- 一条整数的乘法,需要300ps。
- 一条浮点数的乘法,需要600ps
如果我们是在单指令周期的CPU上运行,最复杂的指令是一条浮点数乘法,那就需要600ps。那这三条指令,都需要600ps。三条指令的执行时间,就需要1800ps。
如果我们采用的是6级流水线CPU,每一个Pipeline的Stage都只需要100ps。那么,在这三个指令的执行过程中,在指令1的第一个100ps的Stage结束之后,第二条指令就开始执行了。在第二条指令的第一个100ps的Stage结束之后,第三条指令就开始执行了。这种情况下,这三条指令顺序执行所需要的总时间,就是800ps。那么在1800ps内,使用流水线的CPU比单指令周期的CPU就可以多执行一倍以上的指令数。

流水线设计CPU的风险
- 结构冒险
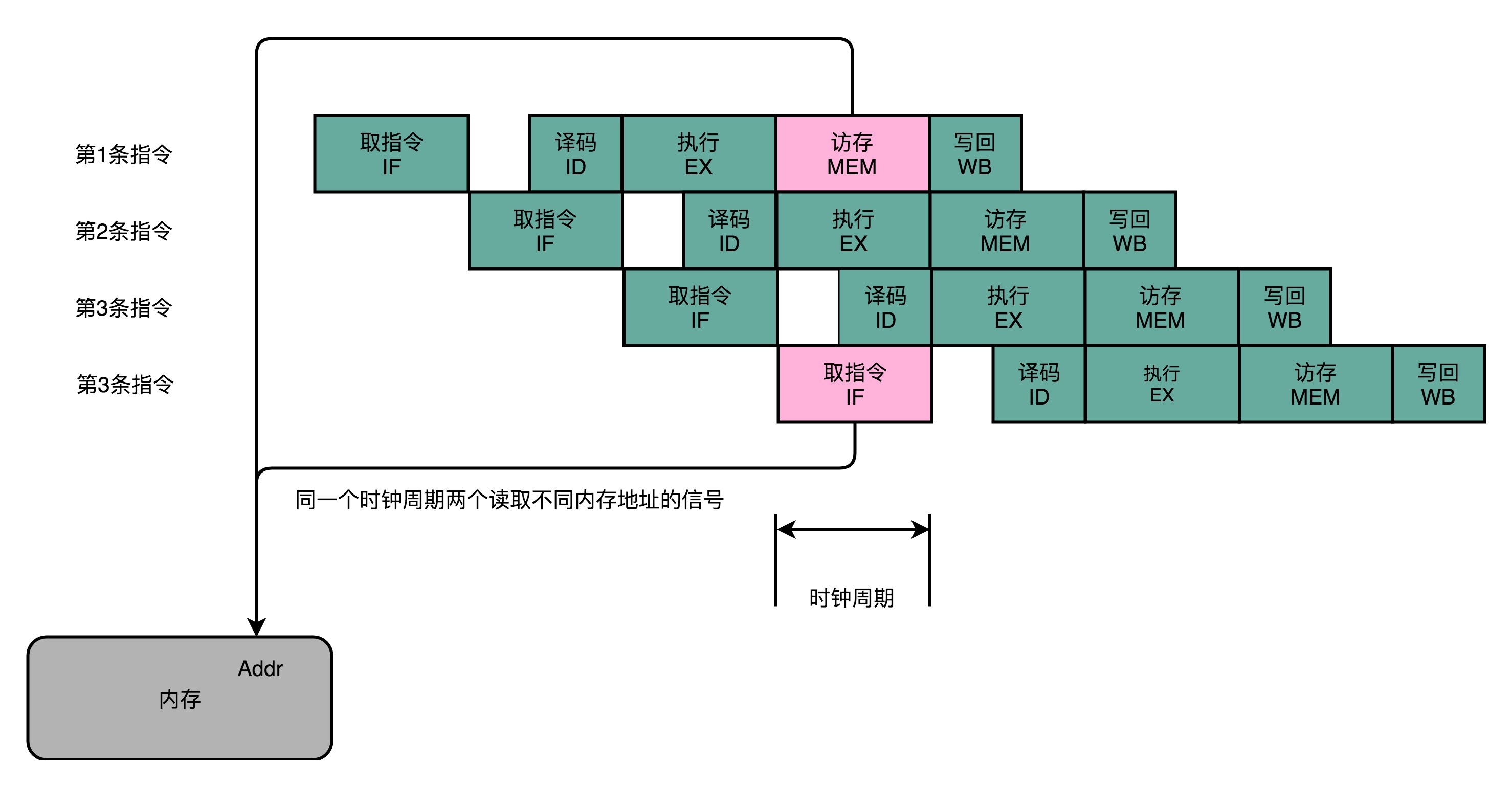
可以看到,在第1条指令执行到访存(MEM)阶段的时候,流水线里的第4条指令,在执行取指令(Fetch)的操作。访存和取指令,都要进行内存数据的读取。但是内存在一个时钟周期是没办法都做的。
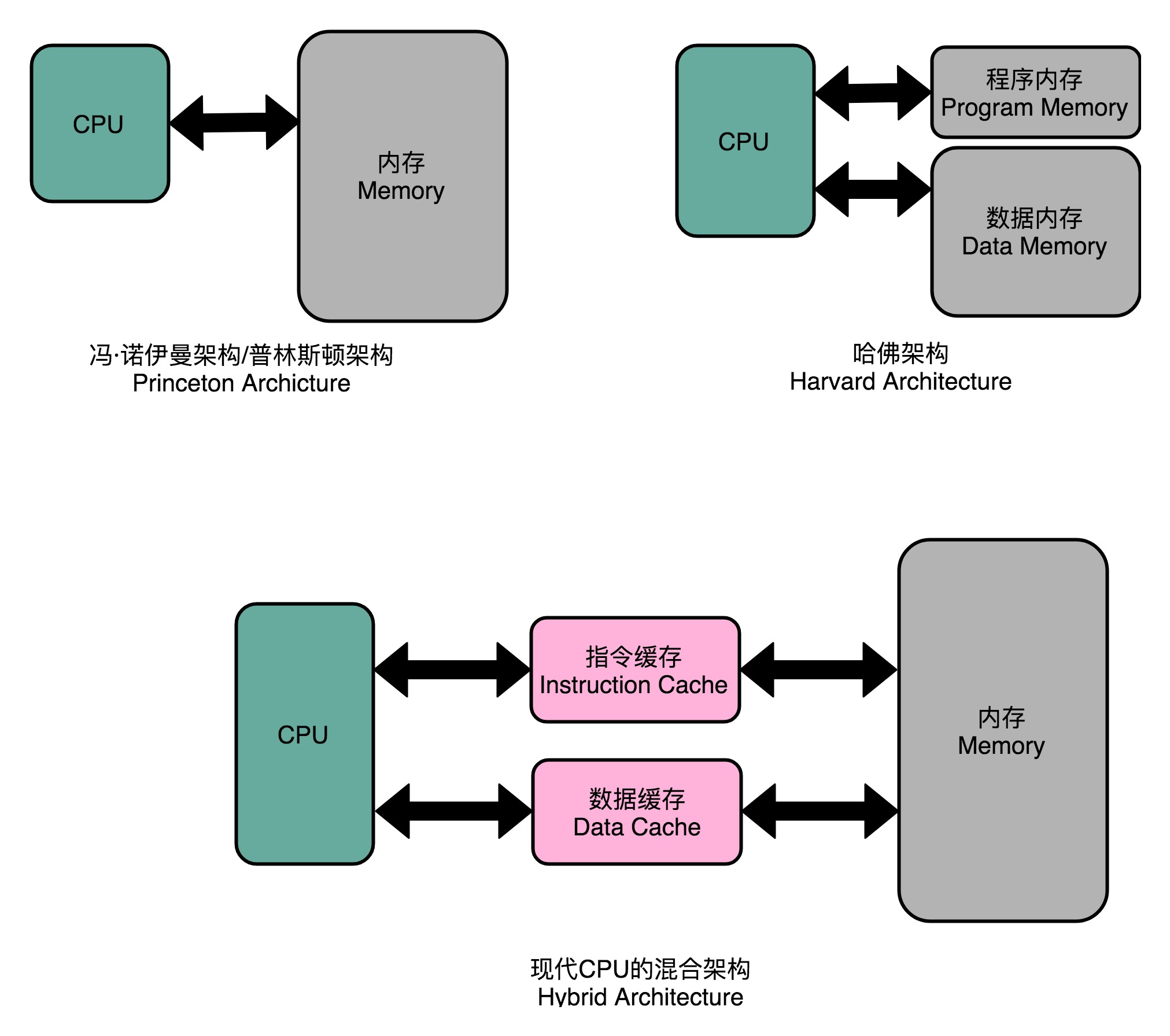
解决办法:在高速缓存层面拆分成指令缓存和数据缓存
在CPU内部的高速缓存部分进行了区分,把高速缓存分成了指令缓存(Instruction Cache)和数据缓存(Data Cache)两部分。
- 数据冒险
先写后读
int main() {
int a = 1;
int b = 2;
a = a + 2;
b = a + 3;
}
这里需要保证a和b的值先赋,然后才能进行准确的运算。这个先写后读的依赖关系,我们一般被称之为数据依赖,也就是Data Dependency。
先读后写
int main() {
int a = 1;
int b = 2;
a = b + a;
b = a + b;
}
这里我们先要读出a = b+a,然后才能正确的写入b的值。这个先读后写的依赖,一般被叫作反依赖,也就是Anti-Dependency。
写后再写
int main() {
int a = 1;
a = 2;
}
很明显,两个写入操作不能乱,要不然最终结果就是错误的。这个写后再写的依赖,一般被叫作输出依赖,也就是Output Dependency。
解决办法:流水线停顿(Pipeline Stall)
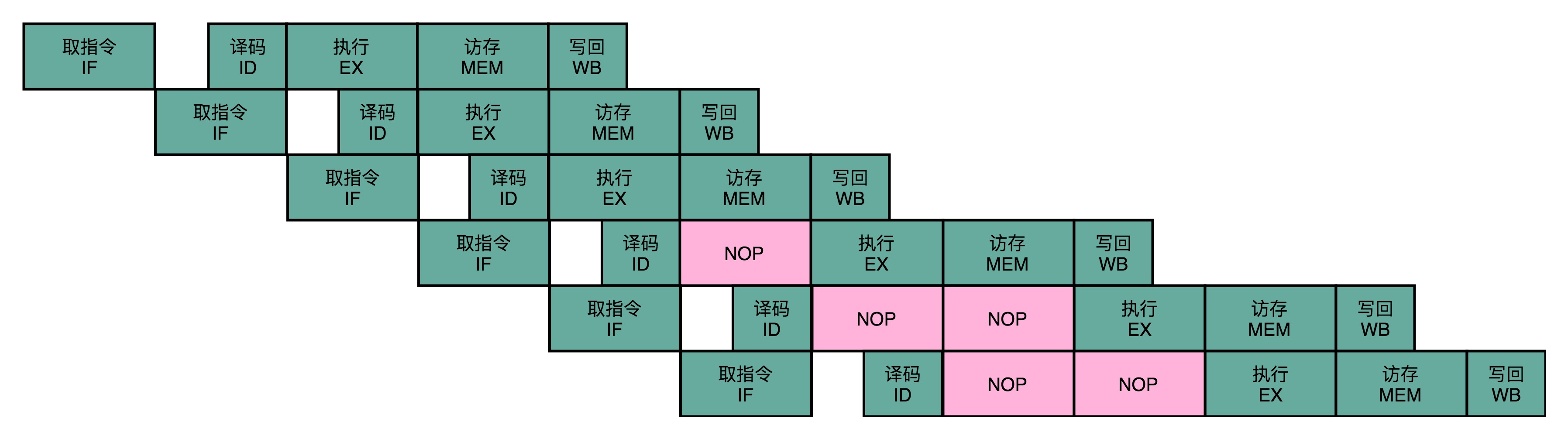
如果我们发现了后面执行的指令,会对前面执行的指令有数据层面的依赖关系,那最简单的办法就是“再等等”。我们在进行指令译码的时候,会拿到对应指令所需要访问的寄存器和内存地址。
在实践过程中,在执行后面的操作步骤前面,插入一个NOP操作,也就是执行一个其实什么都不干的操作。
- 控制冒险
在执行的代码中,一旦遇到 if…else 这样的条件分支,或者 for/while 循环的时候会发生类似cmp比较指令、jmp和jle这样的条件跳转指令。
在jmp指令发生的时候,CPU可能会跳转去执行其他指令。jmp后的那一条指令是否应该顺序加载执行,在流水线里面进行取指令的时候,我们没法知道。要等jmp指令执行完成,去更新了PC寄存器之后,我们才能知道,是否执行下一条指令,还是跳转到另外一个内存地址,去取别的指令。
解决办法:
缩短分支延迟
条件跳转指令其实进行了两种电路操作。
第一种,是进行条件比较。
第二种,是进行实际的跳转,也就是把要跳转的地址信息写入到PC寄存器。无论是opcode,还是对应的条件码寄存器,还是我们跳转的地址,都是在指令译码(ID)的阶段就能获得的。而对应的条件码比较的电路,只要是简单的逻辑门电路就可以了,并不需要一个完整而复杂的ALU。
所以,我们可以将条件判断、地址跳转,都提前到指令译码阶段进行,而不需要放在指令执行阶段。对应的,我们也要在CPU里面设计对应的旁路,在指令译码阶段,就提供对应的判断比较的电路。
分支预测
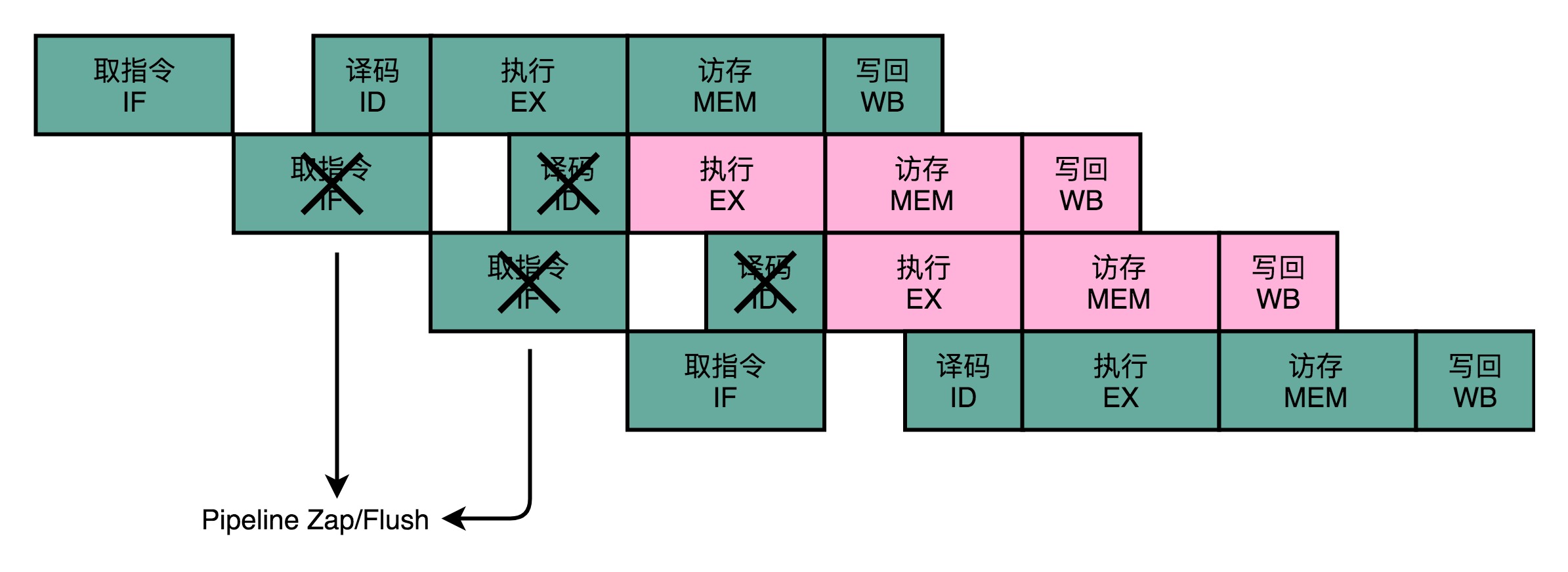
最简单的分支预测技术,叫作“假装分支不发生”。顾名思义,自然就是仍然按照顺序,把指令往下执行。
如果分支预测失败了呢?那我们就把后面已经取出指令已经执行的部分,给丢弃掉。这个丢弃的操作,在流水线里面,叫作Zap或者Flush。CPU不仅要执行后面的指令,对于这些已经在流水线里面执行到一半的指令,我们还需要做对应的清除操作。
动态分支预测
就是记录当前分支的比较情况,直接用当前分支的比较情况,来预测下一次分支时候的比较情况。
例子:
public class BranchPrediction {
public static void main(String args[]) {
long start = System.currentTimeMillis();
for (int i = 0; i < 100; i++) {
for (int j = 0; j <1000; j ++) {
for (int k = 0; k < 10000; k++) {
}
}
}
long end = System.currentTimeMillis();
System.out.println("Time spent is " + (end - start));
start = System.currentTimeMillis();
for (int i = 0; i < 10000; i++) {
for (int j = 0; j <1000; j ++) {
for (int k = 0; k < 100; k++) {
}
}
}
end = System.currentTimeMillis();
System.out.println("Time spent is " + (end - start) + "ms");
}
}
输出:
Time spent in first loop is 5ms
Time spent in second loop is 15ms
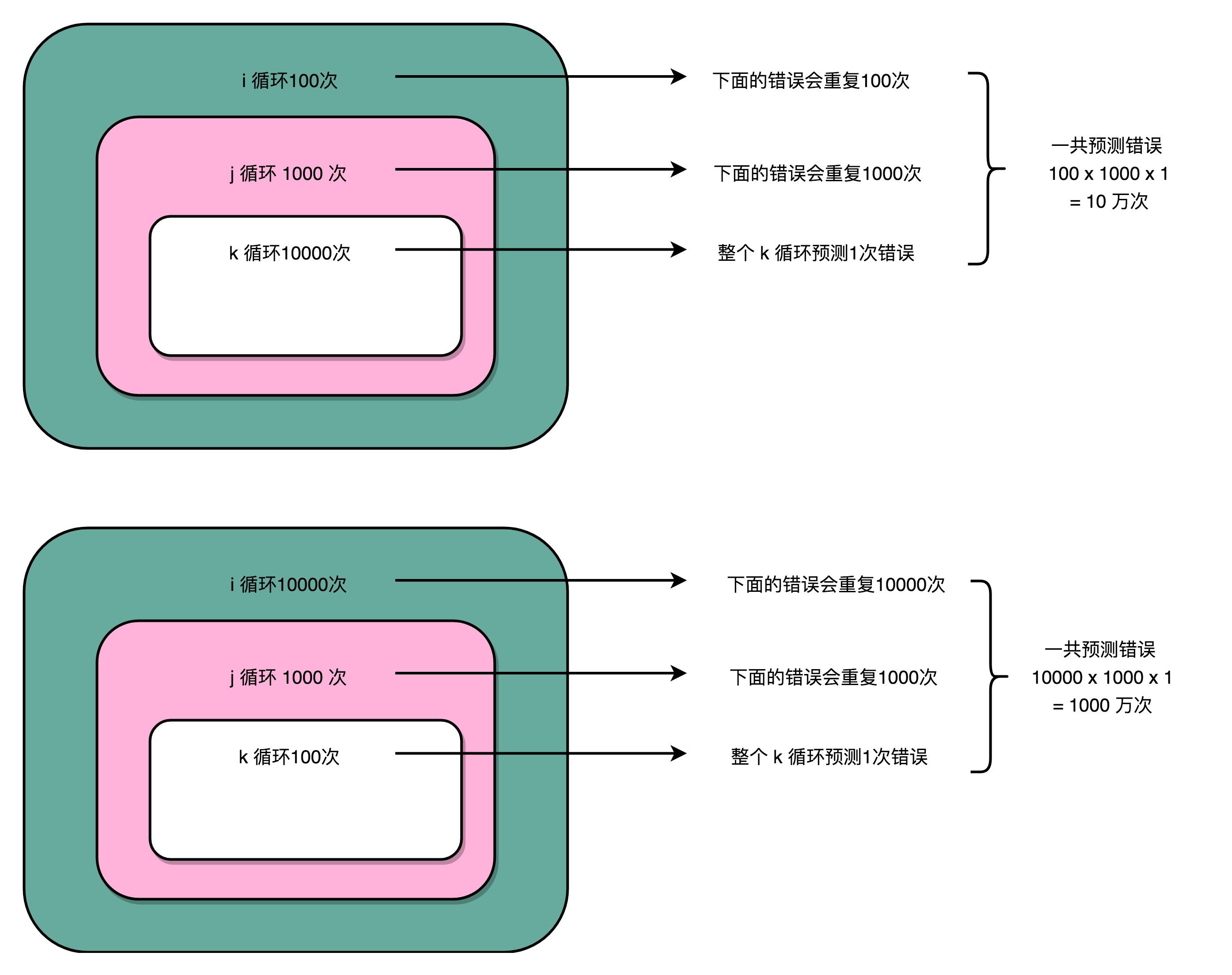
分支预测策略最简单的一个方式,自然是“假定分支不发生”。对应到上面的循环代码,就是循环始终会进行下去。在这样的情况下,上面的第一段循环,也就是内层 k 循环10000次的代码。每隔10000次,才会发生一次预测上的错误。而这样的错误,在第二层 j 的循环发生的次数,是1000次。
最外层的 i 的循环是100次。每个外层循环一次里面,都会发生1000次最内层 k 的循环的预测错误,所以一共会发生 100 × 1000 = 10万次预测错误。
操作数前推
通过流水线停顿可以解决资源竞争产生的问题,但是,插入过多的NOP操作,意味着我们的CPU总是在空转,干吃饭不干活。所以我们提出了操作数前推这样的解决方案。
add $t0, $s2,$s1
add $s2, $s1,$t0
第一条指令,把 s1 和 s2 寄存器里面的数据相加,存入到 t0 这个寄存器里面。
第二条指令,把 s1 和 t0 寄存器里面的数据相加,存入到 s2 这个寄存器里面。

我们要在第二条指令的译码阶段之后,插入对应的NOP指令,直到前一天指令的数据写回完成之后,才能继续执行。但是这样浪费了两个时钟周期。
这个时候完全可以在第一条指令的执行阶段完成之后,直接将结果数据传输给到下一条指令的ALU。然后,下一条指令不需要再插入两个NOP阶段,就可以继续正常走到执行阶段。

这样的解决方案,我们就叫作操作数前推(Operand Forwarding),或者操作数旁路(Operand Bypassing)。
CPU指令乱序执行
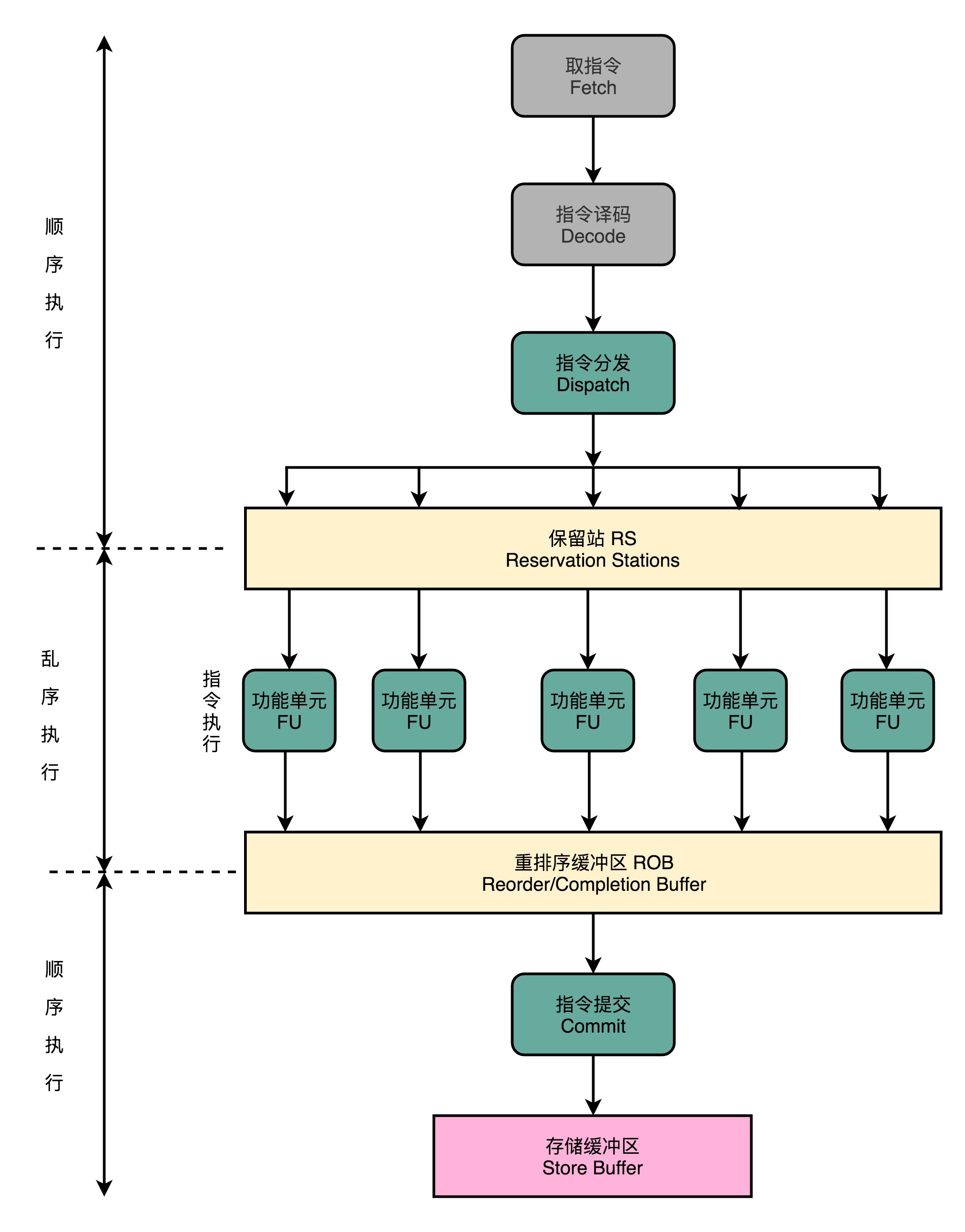
- 在取指令和指令译码的时候,乱序执行的CPU和其他使用流水线架构的CPU是一样的。它会一级一级顺序地进行取指令和指令译码的工作。
- 在指令译码完成之后,CPU不会直接进行指令执行,而是进行一次指令分发,把指令发到一个叫作保留站(Reservation Stations)的地方。
- 这些指令不会立刻执行,而要等待它们所依赖的数据,传递给它们之后才会执行。
- 一旦指令依赖的数据来齐了,指令就可以交到后面的功能单元(Function Unit,FU),其实就是ALU,去执行了。我们有很多功能单元可以并行运行,但是不同的功能单元能够支持执行的指令并不相同。
- 指令执行的阶段完成之后,我们并不能立刻把结果写回到寄存器里面去,而是把结果再存放到一个叫作重排序缓冲区(Re-Order Buffer,ROB)的地方。
- 在重排序缓冲区里,我们的CPU会按照取指令的顺序,对指令的计算结果重新排序。只有排在前面的指令都已经完成了,才会提交指令,完成整个指令的运算结果。
- 实际的指令的计算结果数据,并不是直接写到内存或者高速缓存里,而是先写入存储缓冲区(Store Buffer面,最终才会写入到高速缓存和内存里。
在乱序执行的情况下,只有CPU内部指令的执行层面,可能是“乱序”的。
例子:
a = b + c
d = a * e
x = y * z
里面的 d 依赖于 a 的计算结果,不会在 a 的计算完成之前执行。但是我们的CPU并不会闲着,因为 x = y * z 的指令同样会被分发到保留站里。因为 x 所依赖的 y 和 z 的数据是准备好的, 这里的乘法运算不会等待计算 d,而会先去计算 x 的值。
如果我们只有一个FU能够计算乘法,那么这个FU并不会因为 d 要等待 a 的计算结果,而被闲置,而是会先被拿去计算 x。
在 x 计算完成之后,d 也等来了 a 的计算结果。这个时候,我们的FU就会去计算出 d 的结果。然后在重排序缓冲区里,把对应的计算结果的提交顺序,仍然设置成 a -> d -> x,而计算完成的顺序是 x -> a -> d。
在这整个过程中,整个计算乘法的FU都没有闲置,这也意味着我们的CPU的吞吐率最大化了。
乱序执行,极大地提高了CPU的运行效率。核心原因是,现代CPU的运行速度比访问主内存的速度要快很多。如果完全采用顺序执行的方式,很多时间都会浪费在前面指令等待获取内存数据的时间里。CPU不得不加入NOP操作进行空转。