
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com
源码版本是1.19
在上一篇中,我们知道在kubelet中,工作核心就是围绕着整个syncLoop来完成不同的工作的。syncLoop会根据不同的上报信息管理pod的生命周期,这些操作都是通过HandlePods来实现的。
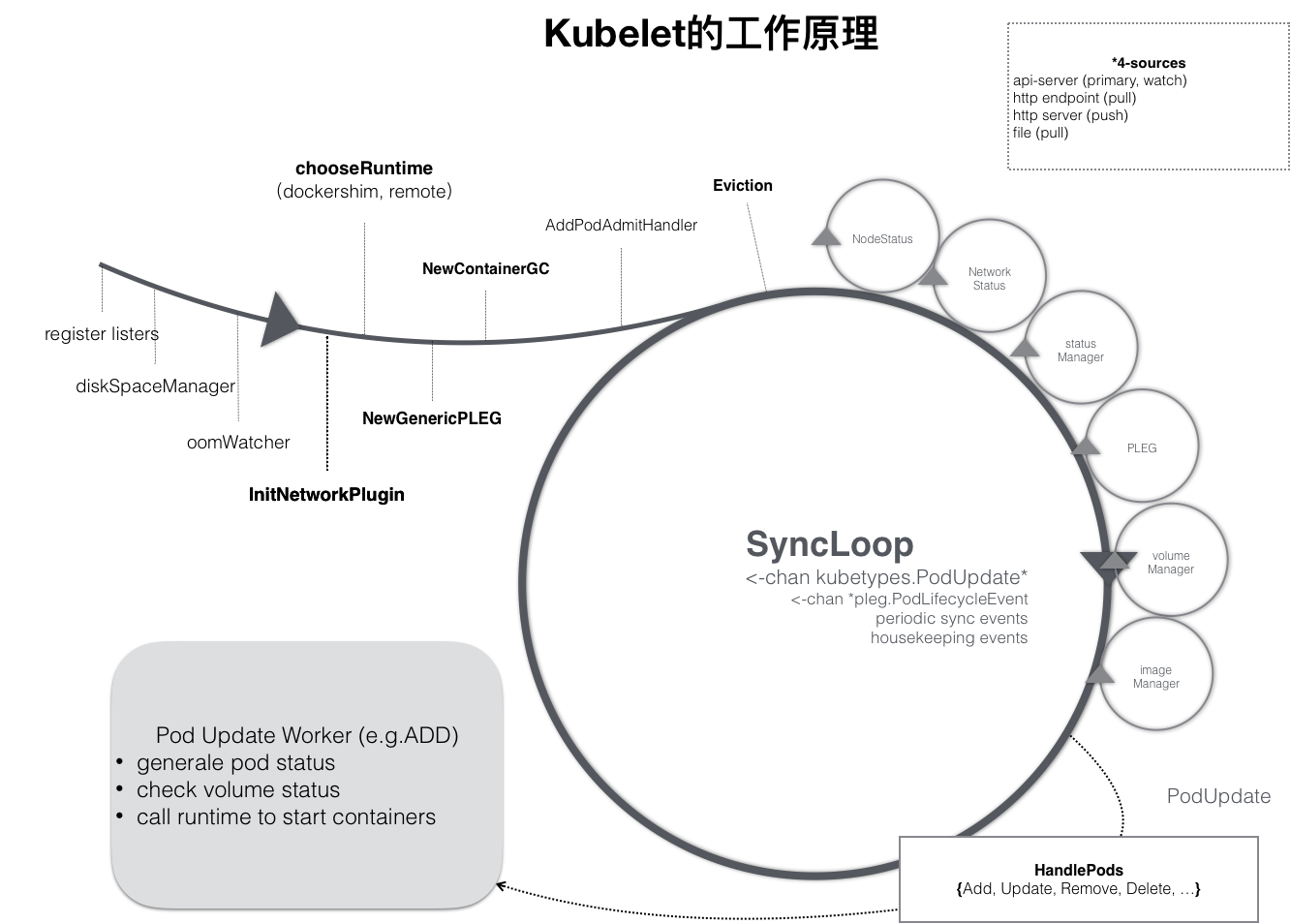
整个事件循环的代码在Kubelet调用run方法最后会通过调用kl.syncLoop方法启动事件循环。
kubelet创建pod流程
syncLoop循环监听管道信息
文件位置:pkg/kubelet/kubelet.go
func (kl *Kubelet) syncLoop(updates <-chan kubetypes.PodUpdate, handler SyncHandler) {
...
syncTicker := time.NewTicker(time.Second)
defer syncTicker.Stop()
housekeepingTicker := time.NewTicker(housekeepingPeriod)
defer housekeepingTicker.Stop()
plegCh := kl.pleg.Watch()
for {
...
kl.syncLoopMonitor.Store(kl.clock.Now())
if !kl.syncLoopIteration(updates, handler, syncTicker.C, housekeepingTicker.C, plegCh) {
break
}
kl.syncLoopMonitor.Store(kl.clock.Now())
}
}
syncLoop的主要逻辑是在syncLoopIteration中实现,由于本文主要探讨的是pod创建相关代码,所以我们只需要看处理configCh管道部分的代码就好了。
syncLoopIteration处理事件循环中的逻辑
func (kl *Kubelet) syncLoopIteration(configCh <-chan kubetypes.PodUpdate, handler SyncHandler,
//方法会监听多个 channel,当发现任何一个 channel 有数据就交给 handler 去处理,在 handler 中通过调用 dispatchWork 分发任务
syncCh <-chan time.Time, housekeepingCh <-chan time.Time, plegCh <-chan *pleg.PodLifecycleEvent) bool {
select {
//该模块将同时 watch 3 个不同来源的 pod 信息的变化(file,http,apiserver),
//一旦某个来源的 pod 信息发生了更新(创建/更新/删除),这个 channel 中就会出现被更新的 pod 信息和更新的具体操作;
case u, open := <-configCh:
if !open {
klog.Errorf("Update channel is closed. Exiting the sync loop.")
return false
}
switch u.Op {
case kubetypes.ADD:
klog.V(2).Infof("SyncLoop (ADD, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodAdditions(u.Pods)
case kubetypes.UPDATE:
klog.V(2).Infof("SyncLoop (UPDATE, %q): %q", u.Source, format.PodsWithDeletionTimestamps(u.Pods))
handler.HandlePodUpdates(u.Pods)
case kubetypes.REMOVE:
klog.V(2).Infof("SyncLoop (REMOVE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodRemoves(u.Pods)
case kubetypes.RECONCILE:
klog.V(4).Infof("SyncLoop (RECONCILE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodReconcile(u.Pods)
case kubetypes.DELETE:
klog.V(2).Infof("SyncLoop (DELETE, %q): %q", u.Source, format.Pods(u.Pods))
handler.HandlePodUpdates(u.Pods)
case kubetypes.SET:
klog.Errorf("Kubelet does not support snapshot update")
default:
klog.Errorf("Invalid event type received: %d.", u.Op)
}
kl.sourcesReady.AddSource(u.Source)
...
}
该模块将同时 watch 3 个不同来源的 pod 信息的变化(file,http,apiserver),一旦某个来源的 pod 信息发生了更新(创建/更新/删除),这个 channel 中就会出现被更新的 pod 信息和更新的具体操作。
HandlePodAdditions执行创建pod
func (kl *Kubelet) HandlePodAdditions(pods []*v1.Pod) {
start := kl.clock.Now()
sort.Sort(sliceutils.PodsByCreationTime(pods))
for _, pod := range pods {
existingPods := kl.podManager.GetPods()
//将pod添加到pod管理器中,如果有pod不存在在pod管理器中,那么这个pod表示已经被删除了
kl.podManager.AddPod(pod)
if kubetypes.IsMirrorPod(pod) {
kl.handleMirrorPod(pod, start)
continue
}
//如果该pod没有被Terminate
if !kl.podIsTerminated(pod) {
// 获取目前还在active状态的pod
activePods := kl.filterOutTerminatedPods(existingPods)
//验证 pod 是否能在该节点运行,如果不可以直接拒绝
if ok, reason, message := kl.canAdmitPod(activePods, pod); !ok {
kl.rejectPod(pod, reason, message)
continue
}
}
mirrorPod, _ := kl.podManager.GetMirrorPodByPod(pod)
//把 pod 分配给给 worker 做异步处理,创建pod
kl.dispatchWork(pod, kubetypes.SyncPodCreate, mirrorPod, start)
//在 probeManager 中添加 pod,如果 pod 中定义了 readiness 和 liveness 健康检查,启动 goroutine 定期进行检测
kl.probeManager.AddPod(pod)
}
}
HandlePodAdditions主要任务是:
- 按照创建时间给pods进行排序;
- 将pod添加到pod管理器中,如果有pod不存在在pod管理器中,那么这个pod表示已经被删除了;
- 校验pod 是否能在该节点运行,如果不可以直接拒绝;
- 调用dispatchWork把 pod 分配给给 worker 做异步处理,创建pod;
- 将pod添加到probeManager中,如果 pod 中定义了 readiness 和 liveness 健康检查,启动 goroutine 定期进行检测;
dispatchWork
func (kl *Kubelet) dispatchWork(pod *v1.Pod, syncType kubetypes.SyncPodType, mirrorPod *v1.Pod, start time.Time) {
...
kl.podWorkers.UpdatePod(&UpdatePodOptions{
Pod: pod,
MirrorPod: mirrorPod,
UpdateType: syncType,
OnCompleteFunc: func(err error) {
if err != nil {
metrics.PodWorkerDuration.WithLabelValues(syncType.String()).Observe(metrics.SinceInSeconds(start))
}
},
})
...
}
dispatchWork会封装一个UpdatePodOptions结构体丢给podWorkers.UpdatePod去执行。
UpdatePod
文件位置:pkg/kubelet/pod_workers.go
func (p *podWorkers) UpdatePod(options *UpdatePodOptions) {
pod := options.Pod
uid := pod.UID
var podUpdates chan UpdatePodOptions
var exists bool
p.podLock.Lock()
defer p.podLock.Unlock()
//如果该pod在podUpdates数组里面找不到,那么就创建channel,并启动异步线程
if podUpdates, exists = p.podUpdates[uid]; !exists {
podUpdates = make(chan UpdatePodOptions, 1)
p.podUpdates[uid] = podUpdates
go func() {
defer runtime.HandleCrash()
p.managePodLoop(podUpdates)
}()
}
// 下发更新事件
if !p.isWorking[pod.UID] {
p.isWorking[pod.UID] = true
podUpdates <- *options
} else {
update, found := p.lastUndeliveredWorkUpdate[pod.UID]
if !found || update.UpdateType != kubetypes.SyncPodKill {
p.lastUndeliveredWorkUpdate[pod.UID] = *options
}
}
}
这个方法会加锁之后获取podUpdates数组里面数据,如果不存在那么会创建一个channel然后执行一个异步协程。
managePodLoop
func (p *podWorkers) managePodLoop(podUpdates <-chan UpdatePodOptions) {
var lastSyncTime time.Time
//遍历channel
for update := range podUpdates {
err := func() error {
podUID := update.Pod.UID
// 直到cache里面有新数据之前这段代码会阻塞,这保证worker在cache里面有新的数据之前不会提前开始。
status, err := p.podCache.GetNewerThan(podUID, lastSyncTime)
if err != nil {
p.recorder.Eventf(update.Pod, v1.EventTypeWarning, events.FailedSync, "error determining status: %v", err)
return err
}
//syncPodFn会在kubelet初始化的时候设置,调用的是kubelet的syncPod方法
err = p.syncPodFn(syncPodOptions{
mirrorPod: update.MirrorPod,
pod: update.Pod,
podStatus: status,
killPodOptions: update.KillPodOptions,
updateType: update.UpdateType,
})
lastSyncTime = time.Now()
return err
}()
if update.OnCompleteFunc != nil {
update.OnCompleteFunc(err)
}
if err != nil {
klog.Errorf("Error syncing pod %s (%q), skipping: %v", update.Pod.UID, format.Pod(update.Pod), err)
}
p.wrapUp(update.Pod.UID, err)
}
}
这个方法会遍历channel里面的数据,然后调用syncPodFn方法并传入一个syncPodOptions,kubelet会在执行NewMainKubelet方法的时候调用newPodWorkers方法设置syncPodFn为Kubelet的syncPod方法。
如下:
func NewMainKubelet(...){
...
klet := &Kubelet{...}
...
klet.podWorkers = newPodWorkers(klet.syncPod, kubeDeps.Recorder, klet.workQueue, klet.resyncInterval, backOffPeriod, klet.podCache)
...
}
syncPod
文件位置:pkg/kubelet/kubelet.go
func (kl *Kubelet) syncPod(o syncPodOptions) error {
// pull out the required options
pod := o.pod
mirrorPod := o.mirrorPod
podStatus := o.podStatus
updateType := o.updateType
...
apiPodStatus := kl.generateAPIPodStatus(pod, podStatus)
// 校验该pod能否运行
runnable := kl.canRunPod(pod)
//如果不能运行,那么回写container的等待原因
if !runnable.Admit {
// Pod is not runnable; update the Pod and Container statuses to why.
apiPodStatus.Reason = runnable.Reason
apiPodStatus.Message = runnable.Message
// Waiting containers are not creating.
const waitingReason = "Blocked"
for _, cs := range apiPodStatus.InitContainerStatuses {
if cs.State.Waiting != nil {
cs.State.Waiting.Reason = waitingReason
}
}
for _, cs := range apiPodStatus.ContainerStatuses {
if cs.State.Waiting != nil {
cs.State.Waiting.Reason = waitingReason
}
}
}
// 更新状态管理器中的状态
kl.statusManager.SetPodStatus(pod, apiPodStatus)
// 如果校验没通过或pod已被删除或pod跑失败了,那么kill掉pod
if !runnable.Admit || pod.DeletionTimestamp != nil || apiPodStatus.Phase == v1.PodFailed {
var syncErr error
...
kl.killPod(pod, nil, podStatus, nil)
....
return syncErr
}
//校验网络插件是否已准备好
if err := kl.runtimeState.networkErrors(); err != nil && !kubecontainer.IsHostNetworkPod(pod) {
kl.recorder.Eventf(pod, v1.EventTypeWarning, events.NetworkNotReady, "%s: %v", NetworkNotReadyErrorMsg, err)
return fmt.Errorf("%s: %v", NetworkNotReadyErrorMsg, err)
}
// 创建
pcm := kl.containerManager.NewPodContainerManager()
// 校验该pod是否已被Terminate
if !kl.podIsTerminated(pod) {
firstSync := true
// 校验该pod是否首次创建
for _, containerStatus := range apiPodStatus.ContainerStatuses {
if containerStatus.State.Running != nil {
firstSync = false
break
}
}
podKilled := false
// 如果该pod 的cgroups不存在,并且不是首次启动,那么kill掉
if !pcm.Exists(pod) && !firstSync {
if err := kl.killPod(pod, nil, podStatus, nil); err == nil {
podKilled = true
}
}
// 如果该pod在上面没有被kill掉,或重启策略不是永不重启
if !(podKilled && pod.Spec.RestartPolicy == v1.RestartPolicyNever) {
// 如果该pod的cgroups不存在,那么就创建cgroups
if !pcm.Exists(pod) {
if err := kl.containerManager.UpdateQOSCgroups(); err != nil {
klog.V(2).Infof("Failed to update QoS cgroups while syncing pod: %v", err)
}
if err := pcm.EnsureExists(pod); err != nil {
kl.recorder.Eventf(pod, v1.EventTypeWarning, events.FailedToCreatePodContainer, "unable to ensure pod container exists: %v", err)
return fmt.Errorf("failed to ensure that the pod: %v cgroups exist and are correctly applied: %v", pod.UID, err)
}
}
}
}
//为静态pod 创建 镜像
if kubetypes.IsStaticPod(pod) {
...
}
// 创建pod的文件目录
if err := kl.makePodDataDirs(pod); err != nil {
kl.recorder.Eventf(pod, v1.EventTypeWarning, events.FailedToMakePodDataDirectories, "error making pod data directories: %v", err)
klog.Errorf("Unable to make pod data directories for pod %q: %v", format.Pod(pod), err)
return err
}
// 如果该pod没有被终止,那么需要等待attach/mount volumes
if !kl.podIsTerminated(pod) {
// Wait for volumes to attach/mount
if err := kl.volumeManager.WaitForAttachAndMount(pod); err != nil {
kl.recorder.Eventf(pod, v1.EventTypeWarning, events.FailedMountVolume, "Unable to attach or mount volumes: %v", err)
klog.Errorf("Unable to attach or mount volumes for pod %q: %v; skipping pod", format.Pod(pod), err)
return err
}
}
// 如果有 image secrets,去 apiserver 获取对应的 secrets 数据
pullSecrets := kl.getPullSecretsForPod(pod)
// 真正的容器创建逻辑
result := kl.containerRuntime.SyncPod(pod, podStatus, pullSecrets, kl.backOff)
kl.reasonCache.Update(pod.UID, result)
if err := result.Error(); err != nil {
for _, r := range result.SyncResults {
if r.Error != kubecontainer.ErrCrashLoopBackOff && r.Error != images.ErrImagePullBackOff {
return err
}
}
return nil
}
return nil
}
该方法主要是为创建pod前做一些准备工作。主要准备工作如下:
- 校验该pod能否运行,如果不能运行,那么回写container的等待原因,然后更新状态管理器中的状态;
- 如果校验没通过或pod已被删除或pod跑失败了,那么kill掉pod,然后返回;
- 校验网络插件是否已准备好,如果没有,直接返回;
- 如果该pod的cgroups不存在,那么就创建cgroups;
- 为静态pod创建镜像;
- 创建pod的文件目录,等待volumes attach/mount;
- 拉取这个pod的Secret;
- 调用containerRuntime.SyncPod真正创建pod;
syncPod
文件位置:pkg/kubelet/kuberuntime/kuberuntime_manager.go
func (m *kubeGenericRuntimeManager) SyncPod(pod *v1.Pod, podStatus *kubecontainer.PodStatus, pullSecrets []v1.Secret, backOff *flowcontrol.Backoff) (result kubecontainer.PodSyncResult) {
// 计算一下有哪些pod中container有没有变化,有哪些container需要创建,有哪些container需要kill掉
podContainerChanges := m.computePodActions(pod, podStatus)
...
// kill掉 sandbox 已经改变的 pod
if podContainerChanges.KillPod {
...
//kill容器操作
killResult := m.killPodWithSyncResult(pod, kubecontainer.ConvertPodStatusToRunningPod(m.runtimeName, podStatus), nil)
result.AddPodSyncResult(killResult)
...
} else {
// kill掉ContainersToKill列表中的container
for containerID, containerInfo := range podContainerChanges.ContainersToKill {
...
if err := m.killContainer(pod, containerID, containerInfo.name, containerInfo.message, nil); err != nil {
killContainerResult.Fail(kubecontainer.ErrKillContainer, err.Error())
klog.Errorf("killContainer %q(id=%q) for pod %q failed: %v", containerInfo.name, containerID, format.Pod(pod), err)
return
}
}
}
//清理同名的 Init Container
m.pruneInitContainersBeforeStart(pod, podStatus)
var podIPs []string
if podStatus != nil {
podIPs = podStatus.IPs
}
podSandboxID := podContainerChanges.SandboxID
if podContainerChanges.CreateSandbox {
var msg string
var err error
...
//为pod创建sandbox
podSandboxID, msg, err = m.createPodSandbox(pod, podContainerChanges.Attempt)
if err != nil {
...
return
}
...
}
podIP := ""
if len(podIPs) != 0 {
podIP = podIPs[0]
}
...
//生成Sandbox的config配置,如pod的DNS、hostName、端口映射
podSandboxConfig, err := m.generatePodSandboxConfig(pod, podContainerChanges.Attempt)
if err != nil {
...
return
}
start := func(typeName string, spec *startSpec) error {
...
// 启动容器
if msg, err := m.startContainer(podSandboxID, podSandboxConfig, spec, pod, podStatus, pullSecrets, podIP, podIPs); err != nil {
...
}
return nil
}
// 临时容器相关
if utilfeature.DefaultFeatureGate.Enabled(features.EphemeralContainers) {
for _, idx := range podContainerChanges.EphemeralContainersToStart {
start("ephemeral container", ephemeralContainerStartSpec(&pod.Spec.EphemeralContainers[idx]))
}
}
// 启动init container
if container := podContainerChanges.NextInitContainerToStart; container != nil {
if err := start("init container", containerStartSpec(container)); err != nil {
return
}
klog.V(4).Infof("Completed init container %q for pod %q", container.Name, format.Pod(pod))
}
// 启动containers列表
for _, idx := range podContainerChanges.ContainersToStart {
start("container", containerStartSpec(&pod.Spec.Containers[idx]))
}
return
}
- 首先会调用computePodActions计算一下有哪些pod中container有没有变化,有哪些container需要创建,有哪些container需要kill掉;
- kill掉 sandbox 已经改变的 pod;
- 如果有container已改变,那么需要调用killContainer方法kill掉ContainersToKill列表中的container;
- 调用pruneInitContainersBeforeStart方法清理同名的 Init Container;
- 调用createPodSandbox方法,创建需要被创建的Sandbox,关于Sandbox我们再下面说到;
- 如果开启了临时容器Ephemeral Container,那么需要创建相应的临时容器,临时容器可以看这篇:https://kubernetes.io/docs/concepts/workloads/pods/ephemeral-containers/;
- 获取NextInitContainerToStart中的container,调用startContainer启动init container;
- 获取ContainersToStart列表中的container,调用startContainer启动containers列表;
computePodActions
文件路径:pkg/kubelet/kuberuntime/kuberuntime_manager.go
func (m *kubeGenericRuntimeManager) computePodActions(pod *v1.Pod, podStatus *kubecontainer.PodStatus) podActions {
klog.V(5).Infof("Syncing Pod %q: %+v", format.Pod(pod), pod)
//判断哪些pod的Sandbox已经改变,如果改变需要重新创建
createPodSandbox, attempt, sandboxID := m.podSandboxChanged(pod, podStatus)
changes := podActions{
KillPod: createPodSandbox,
CreateSandbox: createPodSandbox,
SandboxID: sandboxID,
Attempt: attempt,
ContainersToStart: []int{},
ContainersToKill: make(map[kubecontainer.ContainerID]containerToKillInfo),
}
//需要新建sandbox
if createPodSandbox {
if !shouldRestartOnFailure(pod) && attempt != 0 && len(podStatus.ContainerStatuses) != 0 {
// 如果pod已经存在了,那么不应该创建sandbox
// 如果所有的containers 都已完成,那么也不应该创建一个新的sandbox
// 如果ContainerStatuses是空的,那么我们可以认定,我们从没有成功创建过containers,所以我们应该重试创建sandbox
changes.CreateSandbox = false
return changes
}
//如果InitContainers 不为空,那么将InitContainers的第一个设置成第一个创建的container
if len(pod.Spec.InitContainers) != 0 {
changes.NextInitContainerToStart = &pod.Spec.InitContainers[0]
return changes
}
// 将所有container加入到需要启动的队列中,除了已启动,并且重启策略为RestartPolicyOnFailure的pod
for idx, c := range pod.Spec.Containers {
if containerSucceeded(&c, podStatus) && pod.Spec.RestartPolicy == v1.RestartPolicyOnFailure {
continue
}
changes.ContainersToStart = append(changes.ContainersToStart, idx)
}
return changes
}
//临时容器相关:https://kubernetes.io/zh/docs/concepts/workloads/pods/ephemeral-containers/
if utilfeature.DefaultFeatureGate.Enabled(features.EphemeralContainers) {
for i := range pod.Spec.EphemeralContainers {
c := (*v1.Container)(&pod.Spec.EphemeralContainers[i].EphemeralContainerCommon)
// Ephemeral Containers are never restarted
if podStatus.FindContainerStatusByName(c.Name) == nil {
changes.EphemeralContainersToStart = append(changes.EphemeralContainersToStart, i)
}
}
}
// 检查Init Container运行状态
initLastStatus, next, done := findNextInitContainerToRun(pod, podStatus)
if !done {
if next != nil {
initFailed := initLastStatus != nil && isInitContainerFailed(initLastStatus)
if initFailed && !shouldRestartOnFailure(pod) {
changes.KillPod = true
} else {
// Always try to stop containers in unknown state first.
if initLastStatus != nil && initLastStatus.State == kubecontainer.ContainerStateUnknown {
changes.ContainersToKill[initLastStatus.ID] = containerToKillInfo{
name: next.Name,
container: next,
message: fmt.Sprintf("Init container is in %q state, try killing it before restart",
initLastStatus.State),
}
}
changes.NextInitContainerToStart = next
}
}
// 若init未完成,直接返回
return changes
}
// init已完成,计算需要kill&start的工作container
keepCount := 0
// 校验containers列表的状态
for idx, container := range pod.Spec.Containers {
containerStatus := podStatus.FindContainerStatusByName(container.Name)
//调用post-stop生命周期钩子,这样如果container重启了,那么可以马上分配资源
if containerStatus != nil && containerStatus.State != kubecontainer.ContainerStateRunning {
if err := m.internalLifecycle.PostStopContainer(containerStatus.ID.ID); err != nil {
klog.Errorf("internal container post-stop lifecycle hook failed for container %v in pod %v with error %v",
container.Name, pod.Name, err)
}
}
// 如果container不存在或没有在运行,那么根据RestartPolicy决定是否需要重启
if containerStatus == nil || containerStatus.State != kubecontainer.ContainerStateRunning {
if kubecontainer.ShouldContainerBeRestarted(&container, pod, podStatus) {
message := fmt.Sprintf("Container %+v is dead, but RestartPolicy says that we should restart it.", container)
klog.V(3).Infof(message)
changes.ContainersToStart = append(changes.ContainersToStart, idx)
// 如果container 状态是unknown,那么我们不知道是否它在启动,所以我们先kill掉,再启动,避免同时有两个一样的container
if containerStatus != nil && containerStatus.State == kubecontainer.ContainerStateUnknown {
changes.ContainersToKill[containerStatus.ID] = containerToKillInfo{
name: containerStatus.Name,
container: &pod.Spec.Containers[idx],
message: fmt.Sprintf("Container is in %q state, try killing it before restart",
containerStatus.State),
}
}
}
continue
}
var message string
//到这里,说明container处于running状态,那么当满足下面条件时需要kill掉重启
restart := shouldRestartOnFailure(pod)
// 如果container的 spec已经改变了,那么直接重启
if _, _, changed := containerChanged(&container, containerStatus); changed {
message = fmt.Sprintf("Container %s definition changed", container.Name)
// Restart regardless of the restart policy because the container
// spec changed.
restart = true
// 如果liveness探针检测失败,那么需要kill掉container,并且不需要重启
} else if liveness, found := m.livenessManager.Get(containerStatus.ID); found && liveness == proberesults.Failure {
// If the container failed the liveness probe, we should kill it.
message = fmt.Sprintf("Container %s failed liveness probe", container.Name)
// 如果startup 探针检测失败,那么需要kill掉container,并且不需要重启
} else if startup, found := m.startupManager.Get(containerStatus.ID); found && startup == proberesults.Failure {
// If the container failed the startup probe, we should kill it.
message = fmt.Sprintf("Container %s failed startup probe", container.Name)
// 到这里,如果探针检测又没问题,container又没改变,那么不需要重启
} else {
// Keep the container.
keepCount++
continue
}
// 如果需要重启,那么加入队列
if restart {
message = fmt.Sprintf("%s, will be restarted", message)
changes.ContainersToStart = append(changes.ContainersToStart, idx)
}
//这里时设置需要kill掉的container的列表
changes.ContainersToKill[containerStatus.ID] = containerToKillInfo{
name: containerStatus.Name,
container: &pod.Spec.Containers[idx],
message: message,
}
klog.V(2).Infof("Container %q (%q) of pod %s: %s", container.Name, containerStatus.ID, format.Pod(pod), message)
}
if keepCount == 0 && len(changes.ContainersToStart) == 0 {
changes.KillPod = true
}
return changes
}
computePodActions方法主要做这么几件事:
- 检查PodSandbox有没有改变,如果改变了,那么需要创建PodSandbox;
- 找到需要运行的Init Container设置到NextInitContainerToStart字段中;
- 找到需要被kill掉的Container列表ContainersToKill;
- 找到需要被启动的Container列表ContainersToStart;
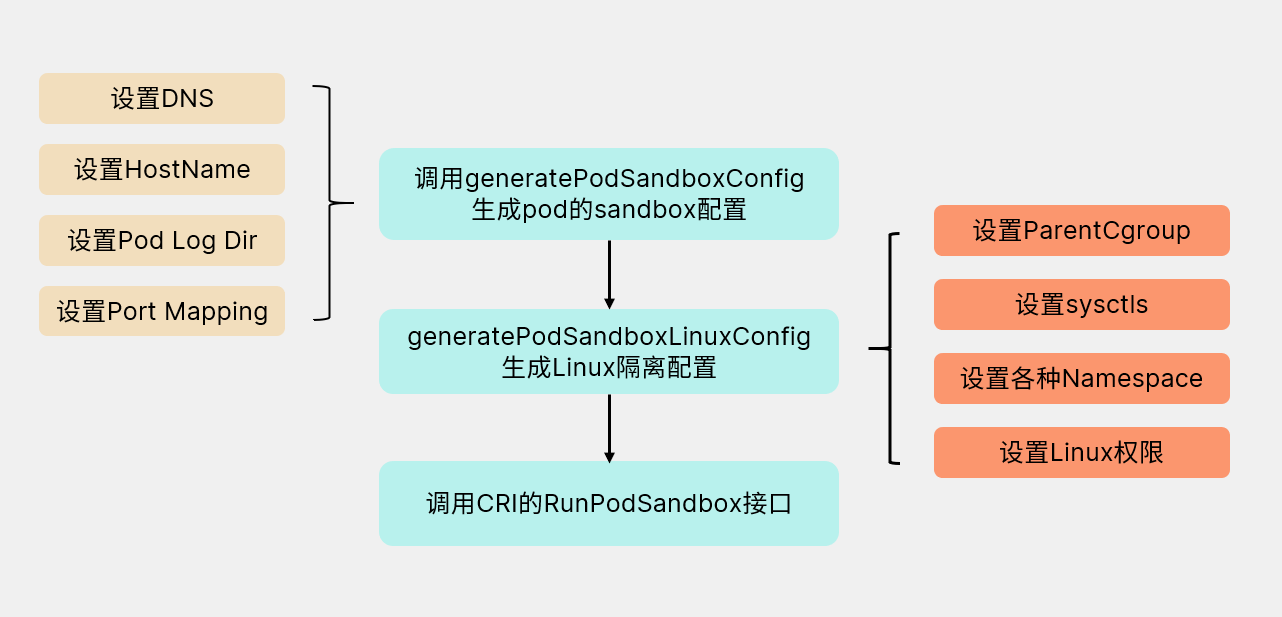
Sandbox
Sandbox沙箱是一种程序的隔离运行机制,其目的是限制不可信进程的权限。k8s 中每个 pod 共享一个 sandbox定义了其 cgroup 及各种 namespace,所以同一个 pod 的所有容器才能够互通,且与外界隔离。我们在调用createPodSandbox方法创建sandbox的时候分为如下几步:
startContainer
文件位置:pkg/kubelet/kuberuntime/kuberuntime_container.go
func (m *kubeGenericRuntimeManager) startContainer(podSandboxID string, podSandboxConfig *runtimeapi.PodSandboxConfig, spec *startSpec, pod *v1.Pod, podStatus *kubecontainer.PodStatus, pullSecrets []v1.Secret, podIP string, podIPs []string) (string, error) {
container := spec.container
// 拉取镜像
imageRef, msg, err := m.imagePuller.EnsureImageExists(pod, container, pullSecrets, podSandboxConfig)
if err != nil {
...
return msg, err
}
//如果是个新的container,那么restartCount应该为0
restartCount := 0
containerStatus := podStatus.FindContainerStatusByName(container.Name)
if containerStatus != nil {
restartCount = containerStatus.RestartCount + 1
}
target, err := spec.getTargetID(podStatus)
if err != nil {
...
return s.Message(), ErrCreateContainerConfig
}
//生成Container config
containerConfig, cleanupAction, err := m.generateContainerConfig(container, pod, restartCount, podIP, imageRef, podIPs, target)
if cleanupAction != nil {
defer cleanupAction()
}
if err != nil {
...
return s.Message(), ErrCreateContainerConfig
}
//调用CRI接口创建Container
containerID, err := m.runtimeService.CreateContainer(podSandboxID, containerConfig, podSandboxConfig)
if err != nil {
...
return s.Message(), ErrCreateContainer
}
//调用生命周期的钩子,预启动Pre Start Container
err = m.internalLifecycle.PreStartContainer(pod, container, containerID)
if err != nil {
...
return s.Message(), ErrPreStartHook
}
m.recordContainerEvent(pod, container, containerID, v1.EventTypeNormal, events.CreatedContainer, fmt.Sprintf("Created container %s", container.Name))
// Step 3: start the container.
// 调用CRI接口启动container
err = m.runtimeService.StartContainer(containerID)
if err != nil {
...
return s.Message(), kubecontainer.ErrRunContainer
}
...
// Step 4: execute the post start hook.
//依然是调用生命周期中设置的钩子 post start
if container.Lifecycle != nil && container.Lifecycle.PostStart != nil {
kubeContainerID := kubecontainer.ContainerID{
Type: m.runtimeName,
ID: containerID,
}
//执行预处理工作
msg, handlerErr := m.runner.Run(kubeContainerID, pod, container, container.Lifecycle.PostStart)
if handlerErr != nil {
m.recordContainerEvent(pod, container, kubeContainerID.ID, v1.EventTypeWarning, events.FailedPostStartHook, msg)
// 如果预处理失败,那么需要kill掉Container
if err := m.killContainer(pod, kubeContainerID, container.Name, "FailedPostStartHook", nil); err != nil {
...
}
return msg, fmt.Errorf("%s: %v", ErrPostStartHook, handlerErr)
}
}
return "", nil
}
这个方法是比较清晰的:
- 拉取镜像;
- 计算一下Container重启次数,如果是首次创建,那么应该是0;
- 生成Container config,用于创建container;
- 调用CRI接口CreateContainer创建Container;
- 在启动之前调用PreStartContainer做预处理工作;
- 调用CRI接口StartContainer启动container;
- 调用生命周期中设置的钩子 post start;
上面涉及了很多pod生命周期相关的操作,具体可以看:Attach Handlers to Container Lifecycle Events。
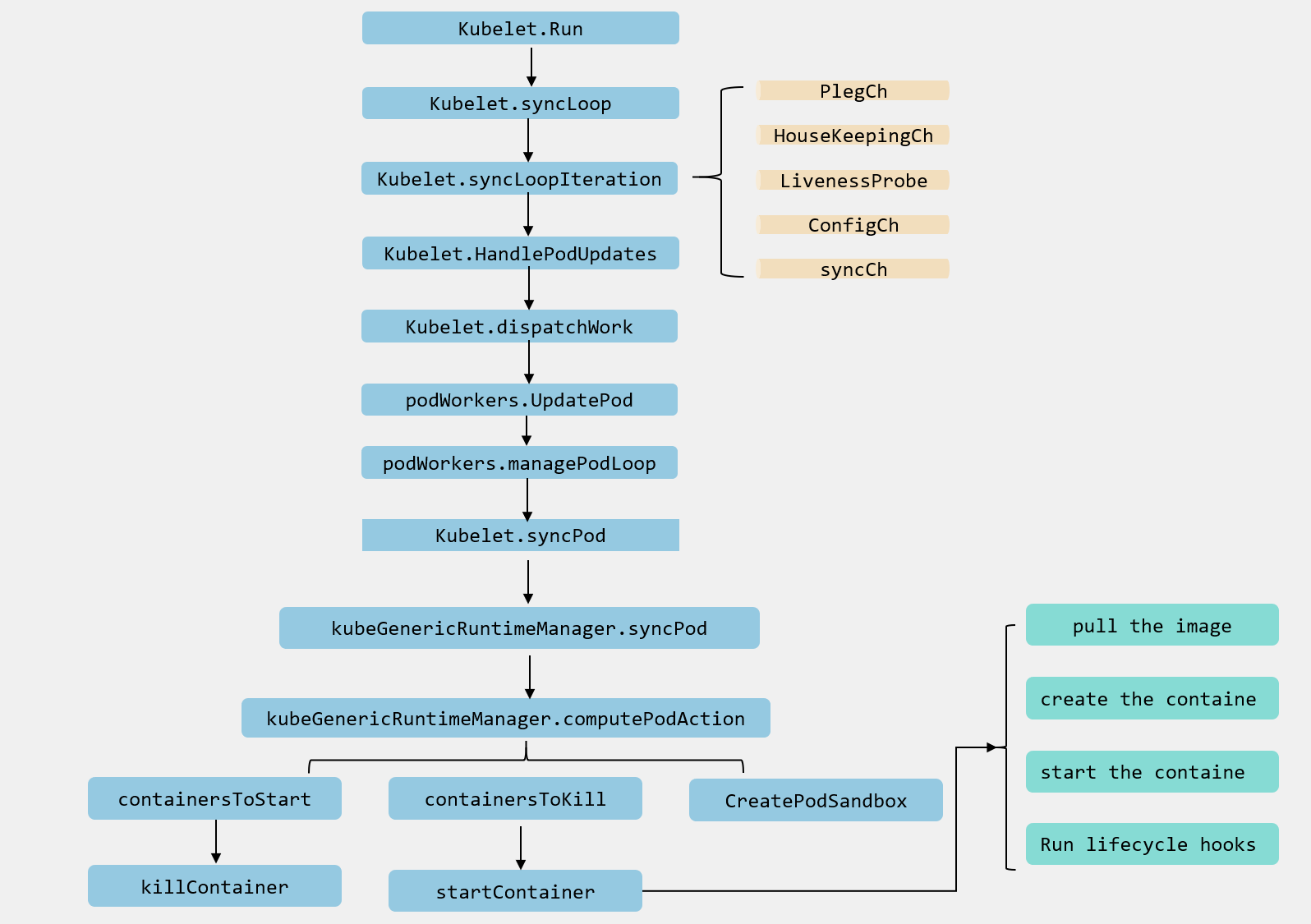
总结
这里我直接放上一个流程图来作为这一篇的结尾。
Reference
https://kubernetes.io/docs/concepts/workloads/pods/
https://draveness.me/kubernetes-pod/
https://kubernetes.io/docs/tasks/configure-pod-container/attach-handler-lifecycle-event/
https://kubernetes.io/docs/concepts/workloads/pods/ephemeral-containers/