Mobileye的CEO Shashua在CVPR2016上介绍了Road Experience Management(REM),目前仍是视觉高精度地图和定位的(几乎)唯一的解决方案。这两年间,mobileye拉拢了若干主机厂加入REM的联盟,将于今年推出EyeQ4,真正开始REM的量产之路。国内也不乏REM的追随者,如momenta、deep motion等。Mobileye在2016年和2017年申请了一批sparse map、crowd sourcing、navigation相关的专利,内容大同小异。这些专利意在保护整个REM产品,覆盖全面,但技术细节很少提及。这里吐血整理了其中的一篇(200多页的)专利,分享给大家参考。专利为US9665100 - Sparse map for autonomous vehicle navigation。
一些说明
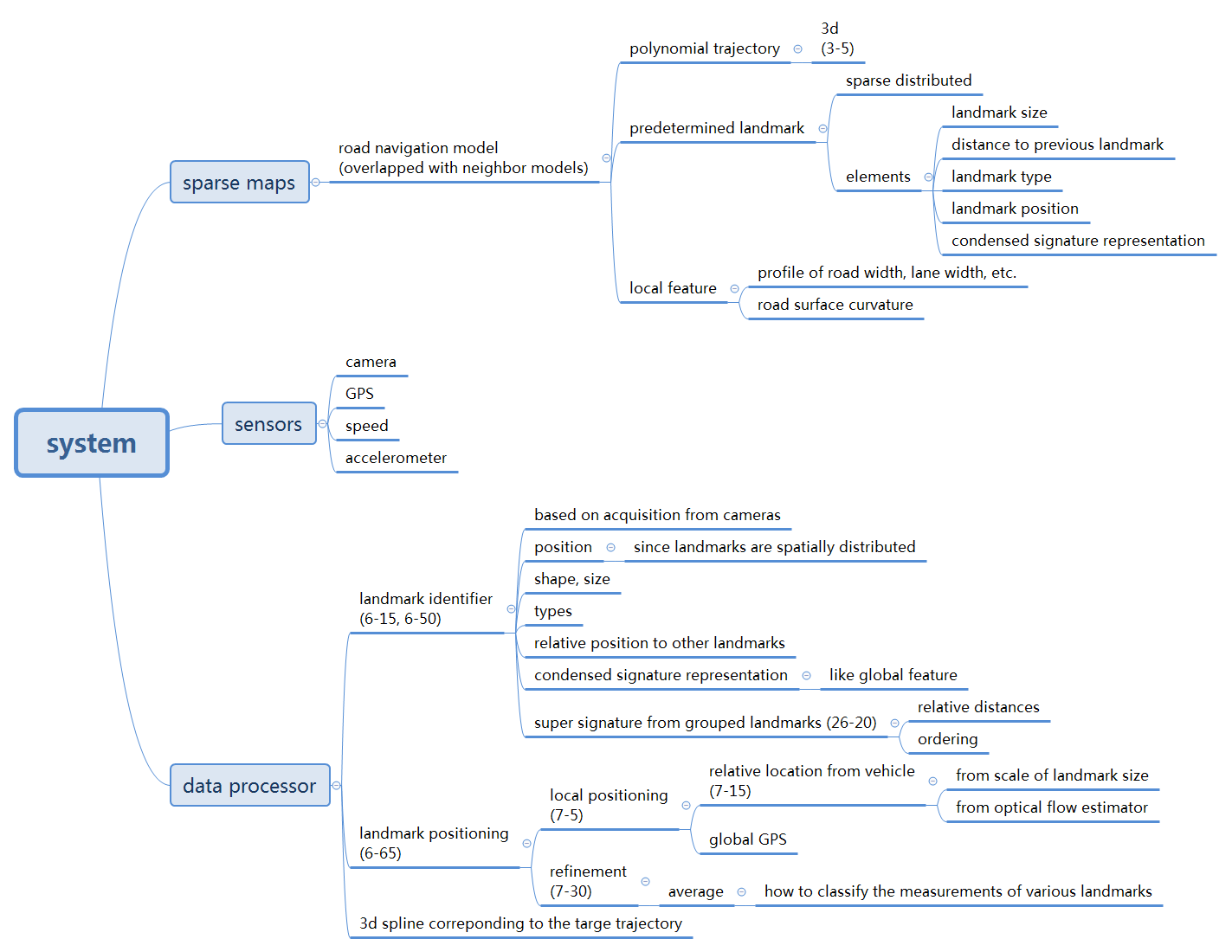
- 整个产品分为系统、众包方法和高精定位方法。其中系统主要包含稀疏地图、传感器和一些数据处理模块。众包部分比较简单,主要介绍了pipeline。定位部分涉及到检测、定位、规划和一些特殊场景。这三部分内容互有交叉,因此区分并不严格。
- 专利并未太多提及目标检测、语义分割等算法。
- 图片中,某些文字下面有一对数字,表示这块内容在专利正文中的位置。如下图,第一个数字为column数(最上面的数字),第二个为行数(右边的小数字)。

系统图
众包

高精定位

总图
