原理与结构
我们需要在ROS下写一个串口节点,该节点订阅talker控制节点发来的命令主题,将命令通过串口设备发送到移动底座;同时串口节点实时接收移动底座通过串口发送过来的传感器实时数据,并将该数据封装后以 sensor (常是imu)主题的模式进行发布, listenner 节点可以实现订阅该主题。这样就实现了 ROS 与移动底座的串口通信过程。
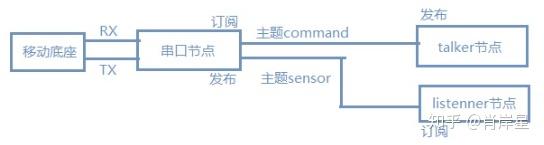 P2.通信原理图
P2.通信原理图
ROS下的serial包
mkdir -p ~/catkin_ws/src/my_serial/
cd ~/catkin_ws/src/my_serial/
git clone https://github.com/wjwwood/serial.git再下载我写好的代码
git clone https://github.com/threefruits/ros_serial_code.git
cd ~/catkin_ws
catkin_make
下面是cpp代码原码与注释
#include <ros/ros.h>
#include <serial/serial.h>
#include <std_msgs/String.h>
#include <std_msgs/Empty.h>
#include <geometry_msgs/Twist.h>
serial::Serial ros_ser;
#define sBUFFERSIZE 10//send buffer size 串口发送缓存长度
unsigned char s_buffer[sBUFFERSIZE];//发送缓存
int l_v=0;
int r_v=0;
int l_d=1;
int r_d=1;
const float d_between=0.165;//半轮间距
const float d=0.125;//轮子半径
typedef union{
unsigned char cvalue[4];
int ivalue;
}int_union;
void cmd_to_serial(const geometry_msgs::Twist msg)
{
r_v=27*(msg.linear.x + msg.angular.z * d_between)/(3.1416*d);
l_v=27*(msg.linear.x - msg.angular.z * d_between)/(3.1416*d);
if(r_v>=0)
{
r_d=0;
r_v=r_v;
} //电机正转
else
{
r_d=1;
r_v=-r_v;
} //电机反转
if(l_v>=0)
{
l_d=0;
l_v=l_v;
}
else
{
l_d=1;
l_v=-l_v;
}
}
void data_to_serial(const int left, const int right, const int left_d, const int right_d)
{
int_union left_v,right_v,left_v_d,right_v_d;
left_v.ivalue=left;
right_v.