1.Numpy 中Matrices和arrays的区分
Numpy matrices必须是2维的,但是 numpy arrays (ndarrays) 可以是多维的(1D,2D,3D····ND). Matrix是Array的一个小的分支,包含于Array。所以matrix 拥有array的所有特性。
在numpy中matrix的主要优势是:相对简单的乘法运算符号。例如,a和b是两个matrices,那么a*b,就是矩阵积。
import numpy as np
a=np.mat('4 3; 2 1')
b=np.mat('1 2; 3 4')
print(a)
# [[4 3]
# [2 1]]
print(b)
# [[1 2]
# [3 4]]
print(a*b)
# [[13 20]
# [ 5 8]] matrix 和 array 都可以通过objects后面加.T 得到其转置。但是 matrix objects 还可以在后面加 .H f得到共轭矩阵, 加 .I 得到逆矩阵。
相反的是在numpy里面arrays遵从逐个元素的运算,所以array:c 和d的c*d运算相当于matlab里面的c.*d运算。
c=np.array([[4, 3], [2, 1]])
d=np.array([[1, 2], [3, 4]])
print(c*d)
# [[4 6]
# [6 4]]而矩阵相乘,则需要numpy里面的dot命令 :
print(np.dot(c,d))
# [[13 20]
# [ 5 8]] ** 运算符的作用也不一样 :
print(a**2)
# [[22 15]
# [10 7]]
print(c**2)
# [[16 9]
# [ 4 1]]因为a是个matrix,所以a**2返回的是a*a,相当于矩阵相乘。而c是array,c**2相当于,c中的元素逐个求平方。
问题就出来了,如果一个程序里面既有matrix 又有array,会让人脑袋大。但是如果只用array,你不仅可以实现matrix所有的功能,还减少了编程和阅读的麻烦。
当然你可以通过下面的两条命令轻松的实现两者之间的转换:np.asmatrix和np.asarray
对我来说,numpy 中的array与numpy中的matrix,matlab中的matrix的最大的不同是,在做归约运算时,array的维数会发生变化,但matrix总是保持为2维。例如下面求平均值的运算
>>> m = np.mat([[1,2],[2,3]])
>>> m
matrix([[1, 2],
[2, 3]])
>>> mm = m.mean(1)
>>> mm
matrix([[ 1.5],
[ 2.5]])
>>> mm.shape
(2, 1)
>>> m - mm
matrix([[-0.5, 0.5],
[-0.5, 0.5]])对array 来说
>>> a = np.array([[1,2],[2,3]])
>>> a
array([[1, 2],
[2, 3]])
>>> am = a.mean(1)
>>> am.shape
(2,)
>>> am
array([ 1.5, 2.5])
>>> a - am #wrong
array([[-0.5, -0.5],
[ 0.5, 0.5]])
>>> a - am[:, np.newaxis] #right
array([[-0.5, 0.5],
[-0.5, 0.5]])
2.Numpy 求解线性方程组
例如我们要解一个这样的二元一次方程组:
x + 2y = 3
4x + 5y = 6
当然我们可以手动写出解析解,然后写一个函数来求解,这实际上只是用 Python 来单纯做“数值计算”. 但实际上,numpy.linalg.solve 可以直接求解线性方程组.
一般地,我们设解线性方程组形如 Ax=b,其中 A 是系数矩阵,b 是一维(n 维也可以,这个下面会提到),x 是未知变量. 再拿上面地最简单的二元一次方程组为例,我们用 numpy.linalg.solve 可以这样写:
In [1]: import numpy as np
...: A = np.mat('1,2; 4,5') # 构造系数矩阵 A
...: b = np.mat('3,6').T # 构造转置矩阵 b (这里必须为列向量)
...: r = np.linalg.solve(A,b) # 调用 solve 函数求解
...: print r
...:
Out[1]: [[-1.]
[ 2.]]
那么前面提到的“ n 维”情形是什么呢?实际上就是同时求解多组形式相同的二元一次方程组,例如我们想同时求解这样两组:
x + 2y = 3
4x + 5y = 6
和
x + 2y = 7
4x + 5y = 8
就可以这样写:
In [2]: import numpy as np
...: A = np.mat('1,2; 4,5') # 构造系数矩阵 A
...: b = np.array([[3,6], [7,8]]).T # 构造转置矩阵 b (这里必须为列向量),
...: 注意这里用的是 array
...: r = np.linalg.solve(A,b) # 调用 solve 函数求解
...: print r
...:
Out[2]: [[-1. -6.33333333]
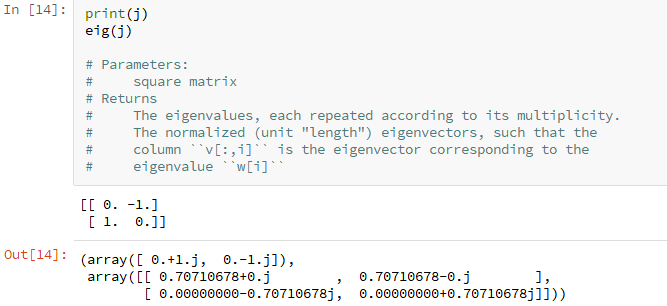
[ 2. 6.66666667]] eig(x) 用来求解矩阵x的特征值和特征向量
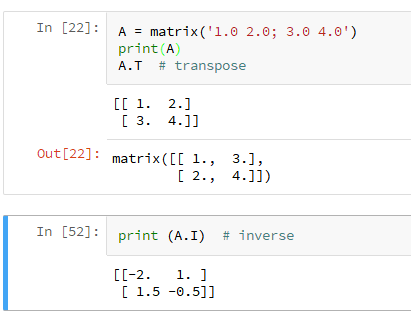
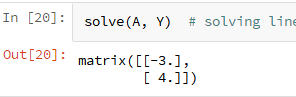
矩阵的转置以及求解Ax=Y的解
3.高斯分布(Gaussian Distribution)的概率密度函数(probability density function):
对应于numpy中:
numpy.random.normal(loc=0.0, scale=1.0, size=None)参数的意义为:
loc:float
此概率分布的均值(对应着整个分布的中心centre)
scale:float
此概率分布的标准差(对应于分布的宽度,scale越大越矮胖,scale越小,越瘦高)
size:int or tuple of ints
输出的shape,默认为None,只输出一个值我们更经常会用到的np.random.randn(size)所谓标准正态分布(μ=0,σ=1μ=0,σ=1),对应于np.random.normal(loc=0, scale=1, size)。
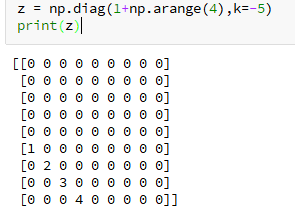
4.numpy.diag()返回一个矩阵的对角线元素,或者创建一个对角阵( diagonal array.)
diag(,k=n),对角线元素移多少个元素,下移为负
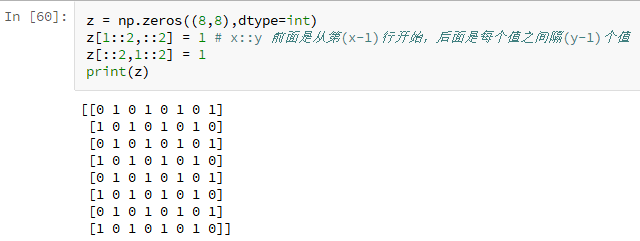
5.X::Y的自己理解

6.如何找到两个数组中的共同元素?
使用 np.intersect1d(z1,z2)函数就可以了。
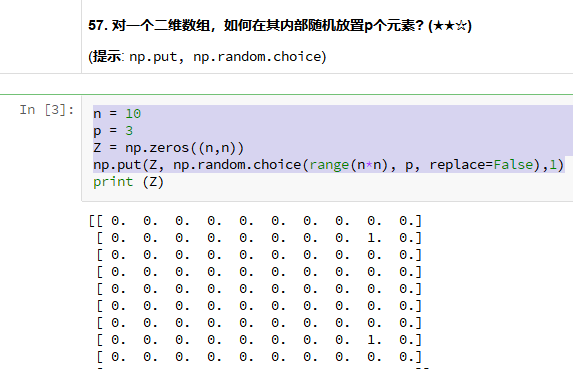
7.在二维数组中随机放入p个元素