滤波和边缘检测
1. 空间滤波和频域滤波
线性滤波和非线性滤波
滑动滤波:
blur 和 boxfilter、高斯滤波器是真正的低通滤波器、与boxfilter相比没有振铃现象。
Practice matter:
Matlab 线性滤波器:H=fspecila(‘Gaussian’,7,1);
Opencv:filter2()
非线性滤波器:中值滤波器
Image filtering: compute function of local neighborhood at each position
Really important!
Enhance images
Denoise, resize, increase contrast, etc.
Extract information from images
Texture, edges, distinctive points, etc.
Detect patterns
Template matching (eg. DIC/DSCM)
https://docs.opencv.org/2.4/doc/tutorials/imgproc/histograms/template_matching/template_matching.html
2. 边缘滤波
Canny Sobel Laplance
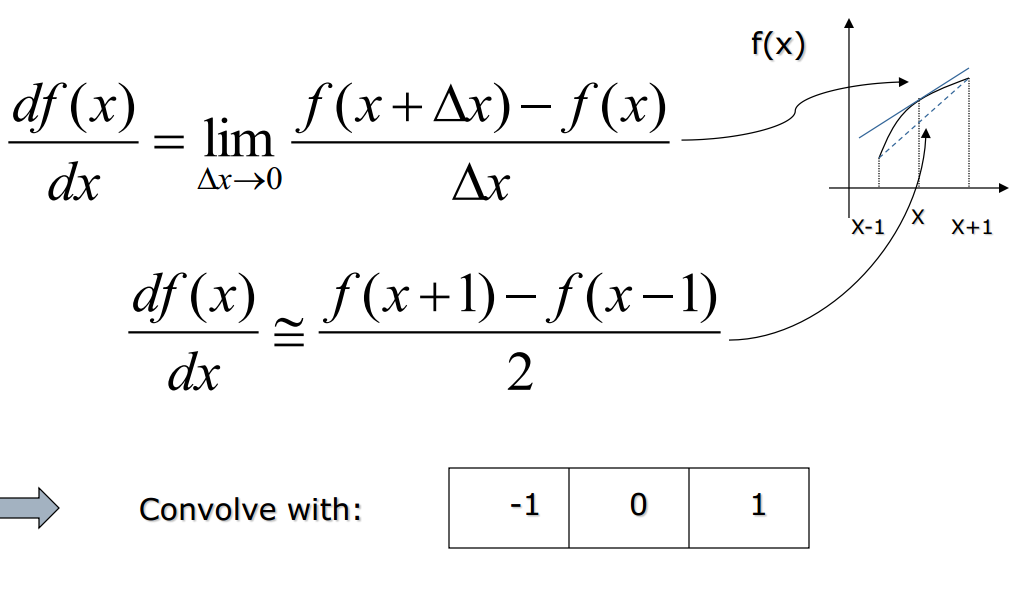
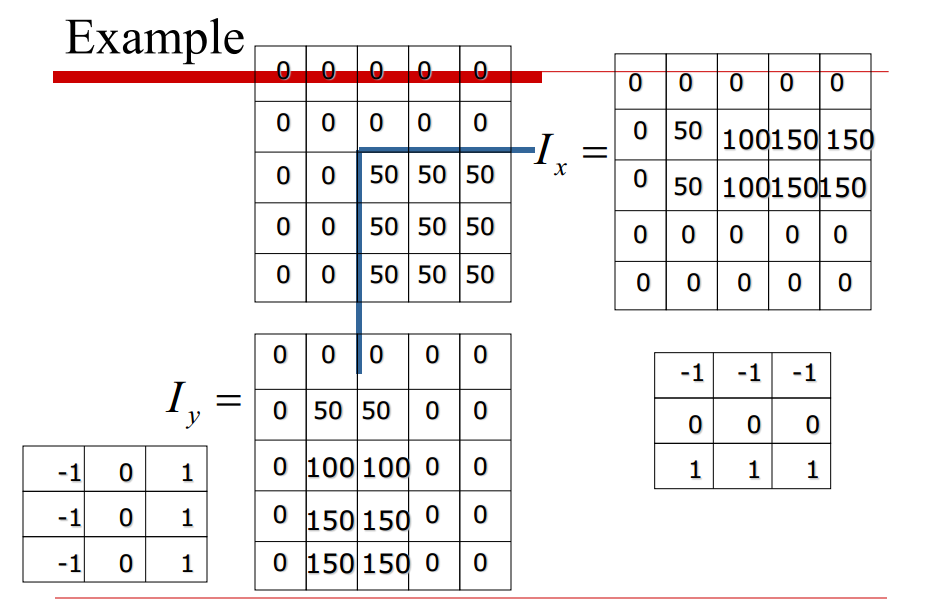
一维图像:对图像进行求导。求导是方法:点位置进行后一位置减前一位置进行差分除以2
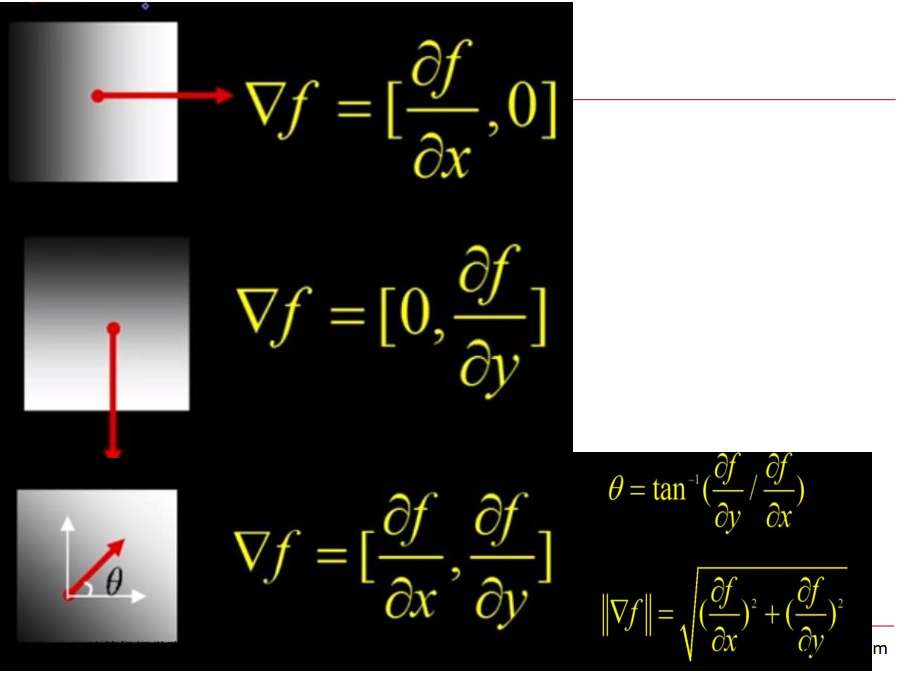
二维图像:
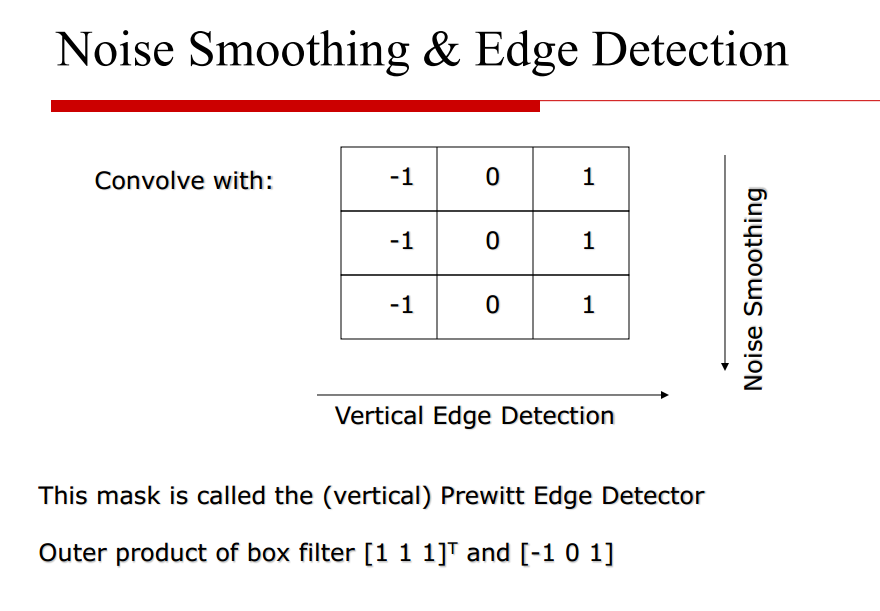
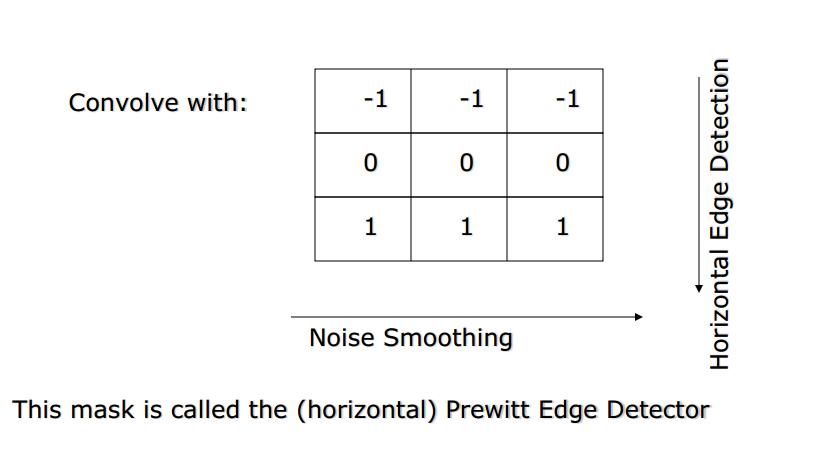
图像求取梯度之前,对噪声较为敏感,需要事先对图像进行平滑去噪处理。
Prewitt 边缘检测算子:
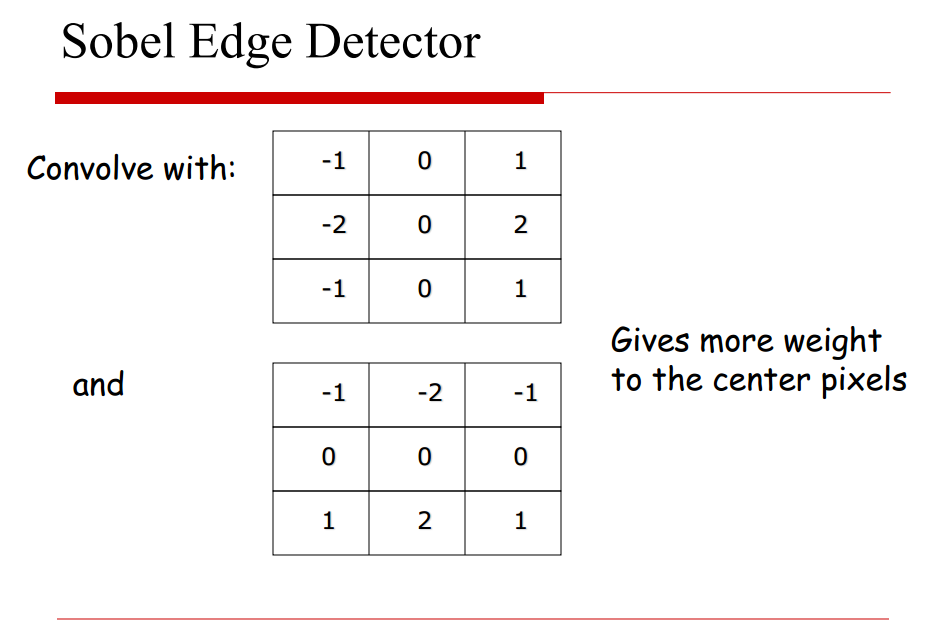
Sobel 边缘检测:
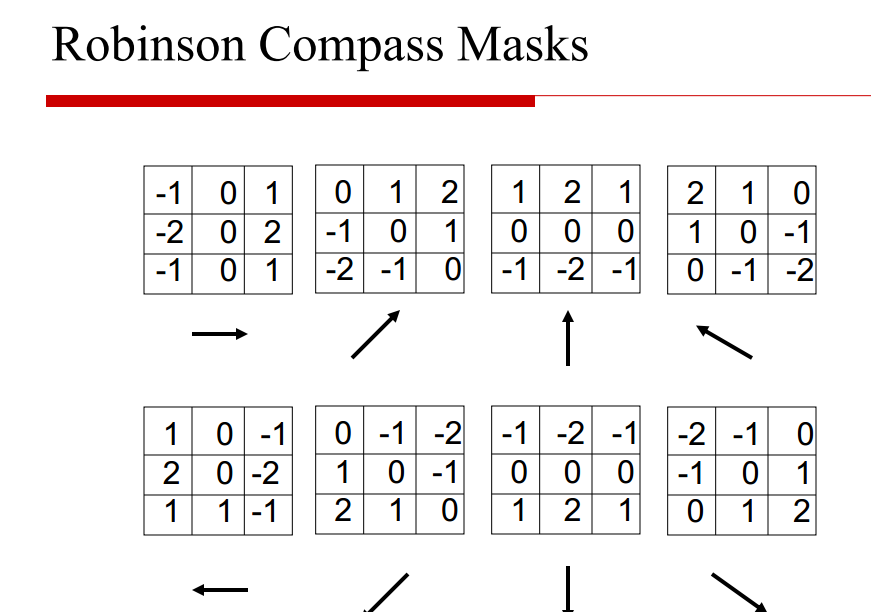
鲁滨逊卷积Mask
一阶导数为极值的地方在二阶导数为0的地方相等。

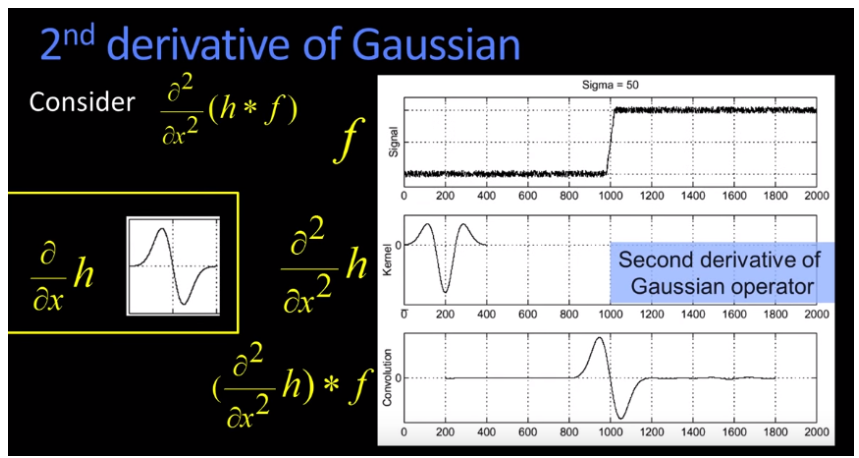
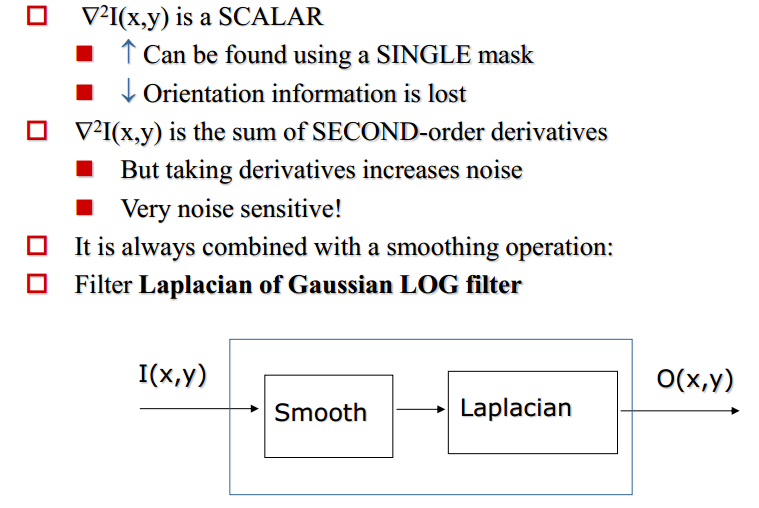
拉普拉斯变换算子:
对于噪声较为敏感,所以先用高斯滤波器进行平滑再求二阶导。

求梯度的幅值:
水平和垂直导数的平方和求导

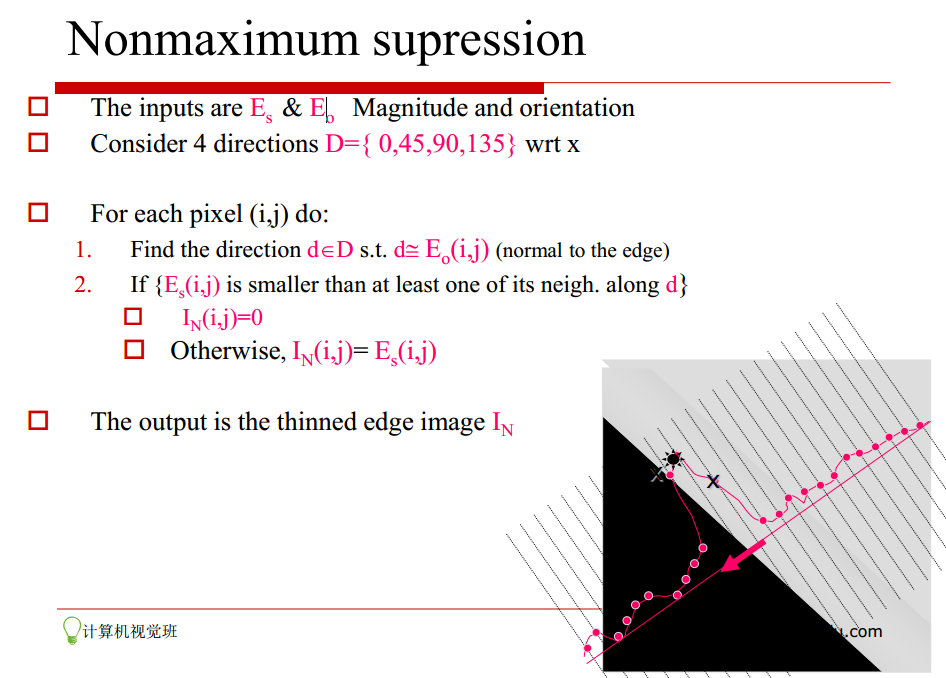
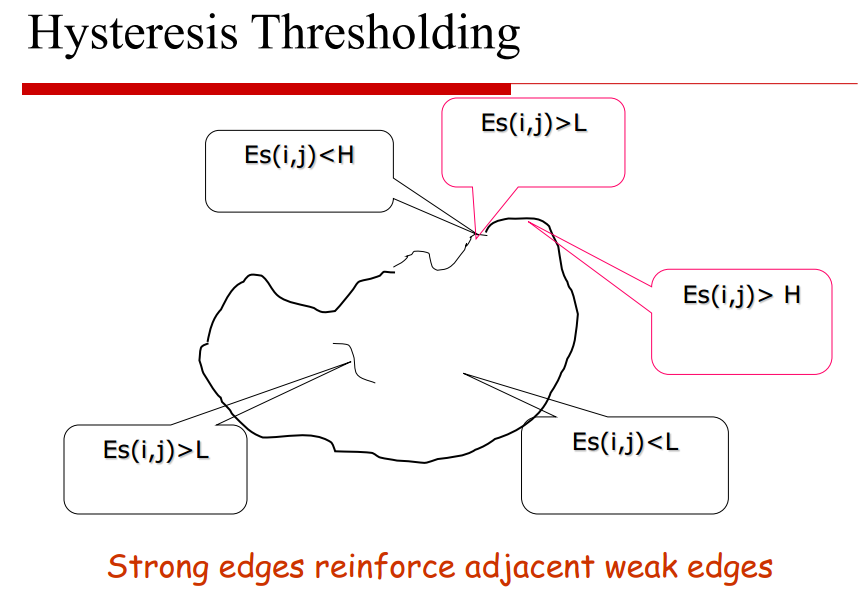
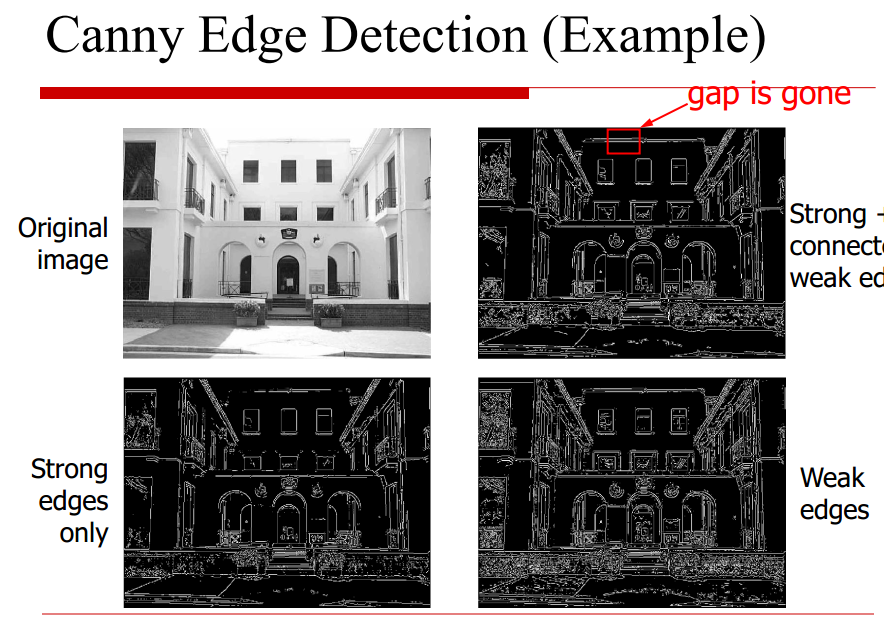
Canny算子:
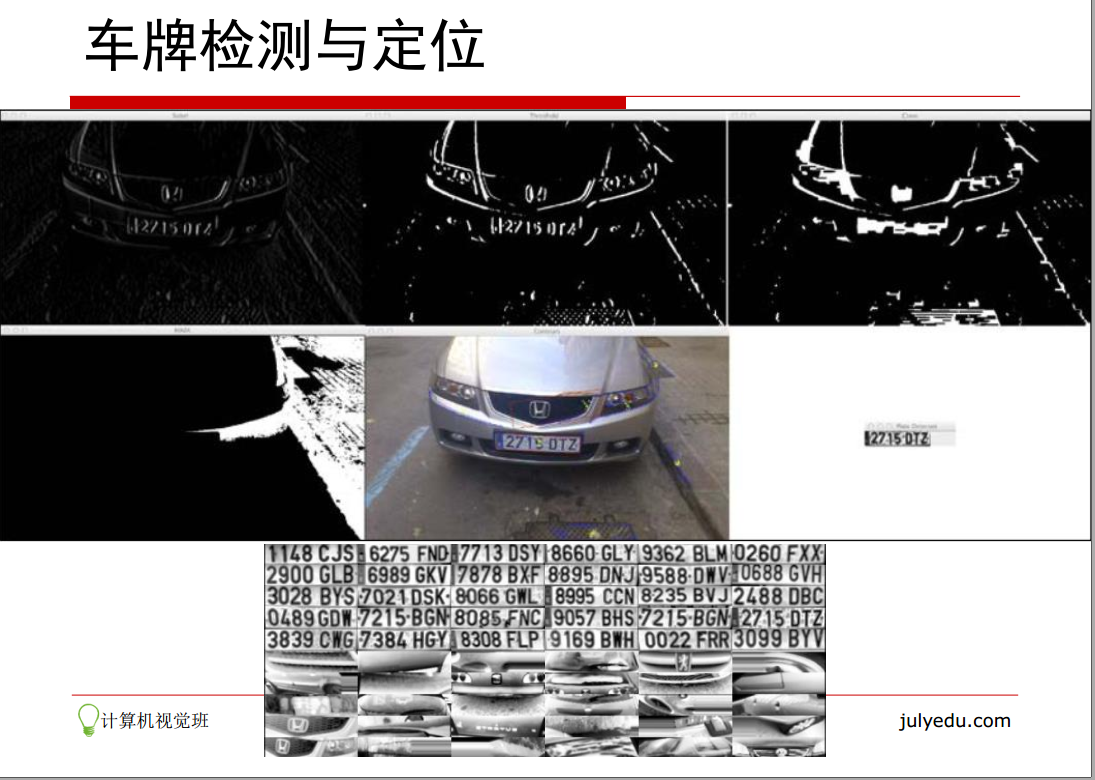
3.项目:车牌检测 SVM和神经网络
1. 图像分割
2.特征提取
3.模式识别
SVM或者神经网络
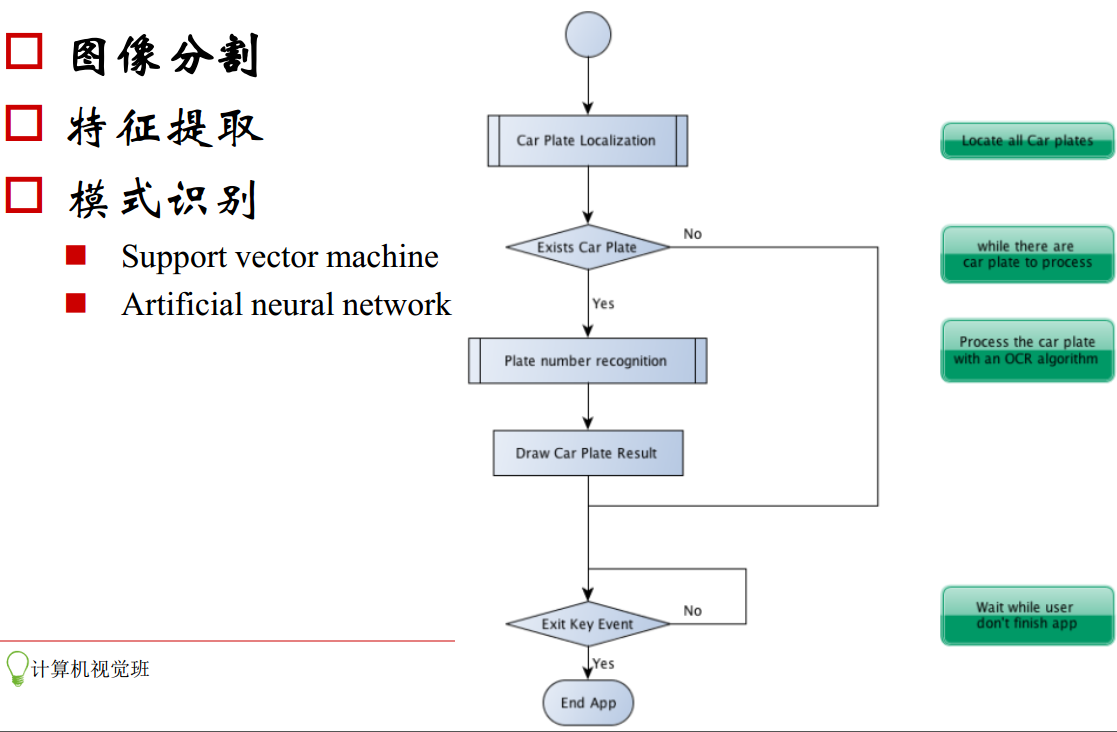
车牌的检测与定位:
1. 从图片的RGB或IR图像检测成灰度
2. 进行高斯滤波进行滤波、
3. 边缘检测 sobel 竖直检测
4.形态化,将连续区域进行白色进行连通
5.去除背景
6. 在原图像进行可能出现的区域矩形框框起来
7.根据长宽比去除大量的矩形框
8.根据SVM进行图像矩形框进行分类。得到唯一一个车牌的位置
9. 识别字符用ANN(人工神经网络)。