1.本算法使用了PCL点云库,因此运行此代码需要安装PCL (http://pointclouds.org/)
其中平面区域的简化效率时70%,其它区域的简化效率时30%.


//downSample #include <pcl/ModelCoefficients.h> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/filters/extract_indices.h> #include <pcl/filters/voxel_grid.h> #include <pcl/features/normal_3d.h> #include <pcl/kdtree/kdtree.h> #include <pcl/sample_consensus/method_types.h> #include <pcl/sample_consensus/model_types.h> #include <pcl/segmentation/sac_segmentation.h> #include <pcl/segmentation/extract_clusters.h> int main (int argc, char** argv) { srand(time(0)); // Read in the cloud data pcl::PCDReader reader; pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>), cloud_f (new pcl::PointCloud<pcl::PointXYZ>); reader.read ("table_scene_lms400.pcd", *cloud_filtered); std::cout << "PointCloud has: " << cloud_filtered->points.size () << " data points." << std::endl; //* //输出 ofstream fout("plane.txt"); // Create the segmentation object for the planar model and set all the parameters pcl::SACSegmentation<pcl::PointXYZ> seg; pcl::PointIndices::Ptr inliers (new pcl::PointIndices); pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients); pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane (new pcl::PointCloud<pcl::PointXYZ> ()); pcl::PCDWriter writer; seg.setOptimizeCoefficients (true); seg.setModelType (pcl::SACMODEL_PLANE); seg.setMethodType (pcl::SAC_RANSAC); seg.setMaxIterations (100); seg.setDistanceThreshold (0.02); //此处可以自己修改,一般保持默认即可 int i=0, nr_points = (int) cloud_filtered->points.size (); while (cloud_filtered->points.size () > 0.3 * nr_points) //此处的0.3可以修改,一般保持默认即可 { // Segment the largest planar component from the remaining cloud seg.setInputCloud (cloud_filtered); seg.segment (*inliers, *coefficients); if (inliers->indices.size () == 0) { std::cout << "Could not estimate a planar model for the given dataset." << std::endl; break; } // Extract the planar inliers from the input cloud pcl::ExtractIndices<pcl::PointXYZ> extract; extract.setInputCloud (cloud_filtered); extract.setIndices (inliers); extract.setNegative (false); // Get the points associated with the planar surface extract.filter (*cloud_plane); std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size () << " data points." << std::endl; for (int i = 0; i <cloud_plane->points.size (); i++) { if (rand() %100 < 30) //平面简化率为70% { fout<<cloud_plane->points[i].x<<" "<<cloud_plane->points[i].y<<" "<<cloud_plane->points[i].z<<endl; } } // Remove the planar inliers, extract the rest extract.setNegative (true); extract.filter (*cloud_f); *cloud_filtered = *cloud_f; } for (int i = 0; i <cloud_filtered->points.size (); i++) { if (rand() %100 < 70) //简化率为30% { fout<<cloud_filtered->points[i].x<<" "<<cloud_filtered->points[i].y<<" "<<cloud_filtered->points[i].z<<endl; } } return (0); }
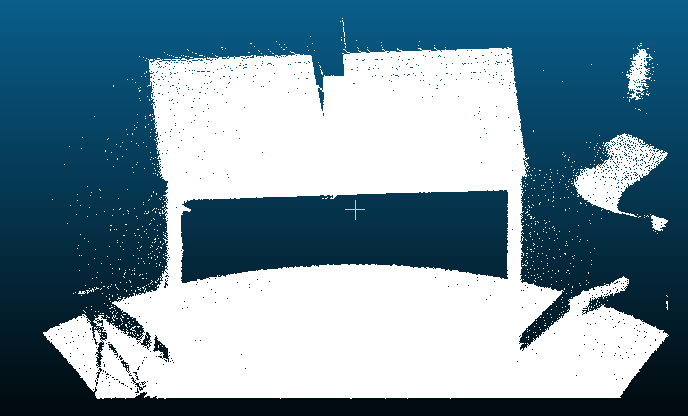
2.简化前后对比




3.总结说明
分别对比三组实验数据:
第一组:桌面和地面简化率较高,其他的对象简化率地
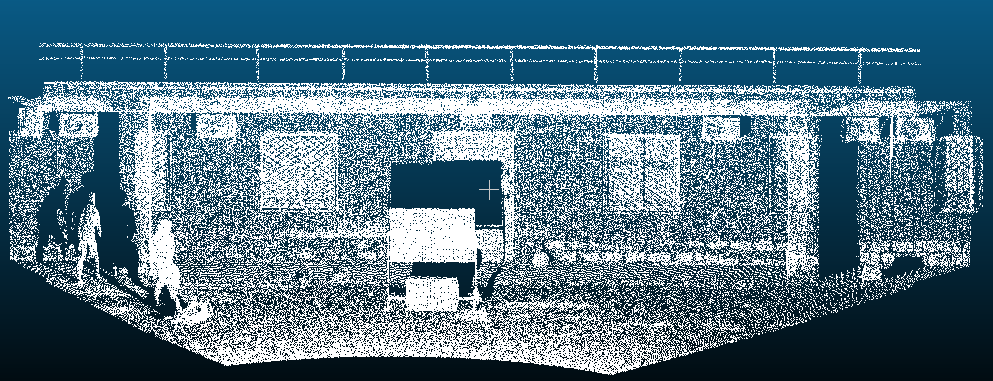
第二组:人简化率地而平面板和地面简化率较高
第三组:墙面上的镶嵌物体得到了很好保留的同时,墙面和地面得到了和好的简化
4.实验第一组数据(其它两组数据为实验室数据不能提供)
http://pan.baidu.com/s/1i3kVW37 或
https://raw.github.com/PointCloudLibrary/data/master/tutorials/table_scene_mug_stereo_textured.pcd